
コンピュータ断層撮影(CT)において逐次近似再構成の軸方向範囲を拡張するための方法およびシステム
【課題】目的は、逐次近似再構成アルゴリズムを用いてコーンビームデータから再構成された画像の軸方向アーチファクトを実質的に低減することにある。
【解決手段】本コンピュータ断層撮影における逐次近似画像再構成の方法は、a)実測された投影データに従って所定の軸に沿って追加データを追加することによって前記実測された投影データを拡張して拡張データを生成するステップと、b)投影ビンのそれぞれにおいて前記拡張データに重みを付けるためにコーン角広がり方向に関する軸方向に重み成分を有する所定の関数に基づいて重みを生成するステップと、c)所定の逐次近似再構成法に従って前記拡張データと前記重みとを用いて完全な軸方向範囲を有する画像ボリュームを逐次近似再構成するステップとを備える。
【解決手段】本コンピュータ断層撮影における逐次近似画像再構成の方法は、a)実測された投影データに従って所定の軸に沿って追加データを追加することによって前記実測された投影データを拡張して拡張データを生成するステップと、b)投影ビンのそれぞれにおいて前記拡張データに重みを付けるためにコーン角広がり方向に関する軸方向に重み成分を有する所定の関数に基づいて重みを生成するステップと、c)所定の逐次近似再構成法に従って前記拡張データと前記重みとを用いて完全な軸方向範囲を有する画像ボリュームを逐次近似再構成するステップとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に画像処理およびシステムに関し、より詳細には、最初に計測されたコーンビームデータがZ軸方向範囲を実質的に増やすために拡張された後で所定の逐次近似再構成法に特定の重みを適用することに関する。
【背景技術】
【0002】
逐次近似再構成(IR)法を用いて円軌道コーンビームデータからz軸方向に沿って長い物体の画像を再構成することは、従来技術においてよく知られている課題である。この課題は、トランケーションされた計測データが原因でIRにおいて生じる軸方向アーチファクトの低減を必要とする。たとえば、撮像するべき物体が図1に示されているように支持円筒(support cylinder)に閉じ込められている場合、投影データは、従来の円軌道コーンビームスキャンジオメトリを用いて収集される。線源Sが所定の垂直軸Zのまわりを回転するとき、X線によって照射される画像ボリュームは、レイp1、p2、p3、およびp4によって規定される。この点に関して、すべてのレイが0から2πの角度範囲内で網掛け領域Aを透過するわけではないので、領域Aはフルスキャン方式で十分に照射されない。一般に、逐次近似再構成アルゴリズムでは、上述の不十分な計測データが原因で領域Aを正確に再構成できない。
【0003】
そのうえ、IRの反復性が軸方向アーチファクトの一因となる。IRは再投影を用いるので、繰り返しのインスタンス(instance)後に毎回、再構成視野(reconstruction field of view)の軸方向範囲が減少する。さらに図1を参照すると、レイp5は、所定の逐次近似再構成アルゴリズムを直接適用することにより六角形の領域Bを再構成するために用いられる。残念なことに、レイp5は領域Bと領域Aの両方を通過するので、領域Aにおけるある程度の誤差は、逐次近似処理(iteration process)の複数のインスタンスを通してレイp5を用いることによって領域Bに伝播する。したがって、領域Bにおいて、再構成された値は正確ではない。
【発明の概要】
【発明が解決しようとする課題】
【0004】
目的は、逐次近似再構成アルゴリズムを用いてコーンビームデータから再構成された画像の軸方向アーチファクトを実質的に低減することにある。
【課題を解決するための手段】
【0005】
本実施形態に係るコンピュータ断層撮影における逐次近似画像再構成の方法は、
a)実測された投影データに従って所定の軸に沿って追加データを追加することによって前記実測された投影データを拡張して拡張データを生成するステップと、
b)投影ビンのそれぞれにおいて前記拡張データに重みを付けるためにコーン角広がり方向に関する軸方向に重み成分を有する所定の関数に基づいて重みを生成するステップと、
c)所定の逐次近似再構成法に従って前記拡張データと前記重みとを用いて完全な軸方向範囲を有する画像ボリュームを逐次近似再構成するステップとを備える。
【図面の簡単な説明】
【0006】
【図1】マルチスライスX線CT装置またはスキャナにおいて円軌道コーンビームデータを用いて軸方向アーチファクトを発生させるための従来技術の問題の特定の状況を示す図。
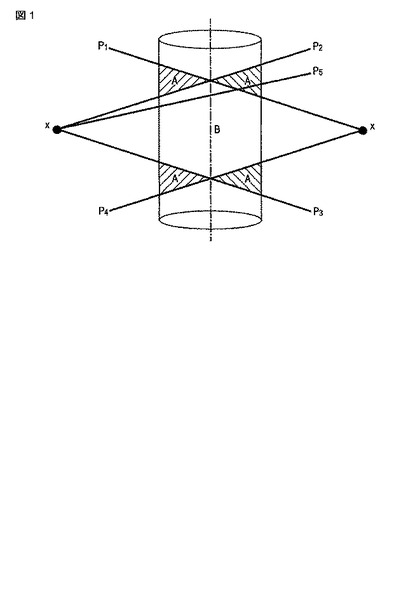
【図2】本発明による、軸方向アーチファクトを実質的に低減するためのマルチスライスX線CT装置またはスキャナの一実施形態における特定の要素を示す図。
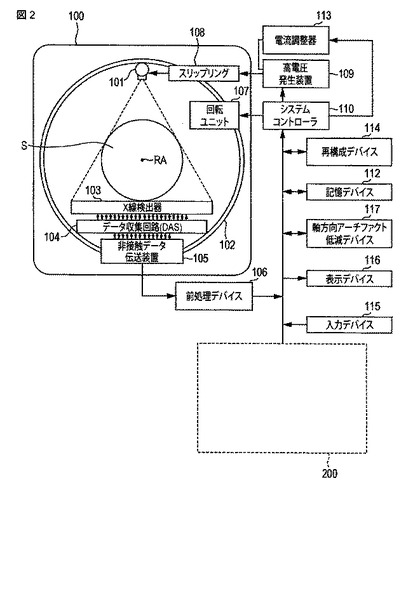
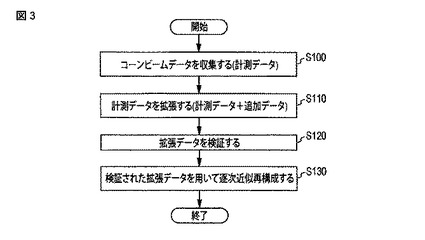
【図3】本発明による一実施形態における軸方向アーチファクトを実質的に低減するための逐次近似再構成処理に関与する全般的なステップを示すフロー図。
【図4】本発明による一実施形態における軸方向アーチファクトを実質的に低減するための拡張データの生成および検証に関与するやや詳細なステップを示すフロー図。
【図5】本発明により軸方向アーチファクトを実質的に低減するための検出器行の関数として軸方向重みの例示的な検証関数を示す図。
【図6A】かなりの軸方向アーチファクトが画像ボリュームの上部および下部に見られる、胸部の逐次近似再構成画像。
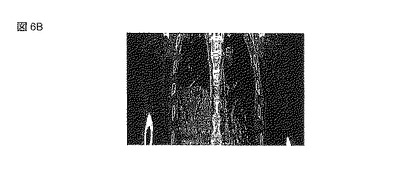
【図6B】本発明により軸方向アーチファクトが実質的に低減された、胸部の逐次近似再構成画像。
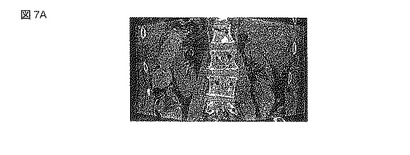
【図7A】かなりの軸方向アーチファクトが画像ボリュームの上部および下部に見られる、腹部の逐次近似再構成画像。
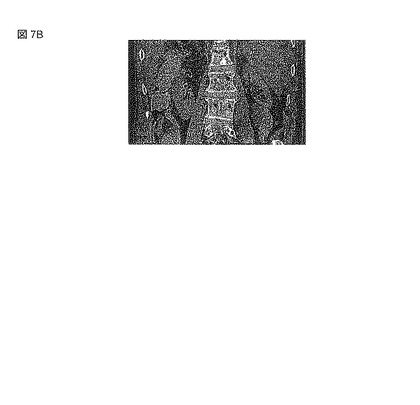
【図7B】本発明により軸方向アーチファクトが実質的に低減された、腹部の逐次近似再構成画像。
【発明を実施するための形態】
【0007】
ここで図面を参照すると、同じ参照番号はすべての図面を通して対応する構造を示すが、特に図2を参照すると、図は、ガントリ100と他のデバイスまたはユニットとを含む、本発明によるマルチスライスX線CT装置またはスキャナの一実施形態を示す。ガントリ100は、側面図にて示されており、X線管101と、環状フレーム102と、多列または2次元配列型のX線検出器103とをさらに含む。X線管101およびX線検出器103は、環状フレーム102上の対象(subject)Sを挟んで反対側に取り付けられ、環状フレーム102は、回転軸RAのまわりに回転可能に支持される。回転ユニット107は、フレーム102を0.4秒/回転などの高速で回転させ、対象Sは、軸RAに沿って、図示の紙面に対する奥行き方向または手前方向に移動される。
【0008】
マルチスライスX線CT装置は、X線管101がX線を生成するようにスリップリング108を介して管電圧をX線管101に印加する高電圧発生装置109をさらに含む。X線は対象Sに向かって照射され、対象Sの断面領域は円によって表されている。X線検出器103は、対象Sを透過した照射X線を検出するために、対象Sを挟んでX線管101の反対側にある。
【0009】
本発明の実施形態では、X線は、所定のコーンビーム角および所定のファンビーム角でX線管101から放射される。本発明による一実施形態では、線源101は、データ収集中に、円軌道コーンビームデータを収集するために所定の円形軌道を進む。本発明による別の実施形態では、線源101は、螺旋軌道コーンビームデータを収集するために所定の螺旋状軌道を進む。
【0010】
さらに図2を参照すると、X線CT装置またはスキャナは、X線検出器103からの検出された信号を処理するための他のデバイスをさらに含む。データ収集回路またはデータ収集システム(DAS)104は、各チャンネルに対してX線検出器103から出力された信号を電圧信号に変換し、それを増幅して、さらにデジタル信号に変換する。X線検出器103およびDAS104は、1回転あたりの所定の全投影数(TPPR:total number of projections per rotation)を、最大で900TPPR、900TPPRから1800TPPRの間、および900TPPRから3600TPPRの間とできるよう処理するように構成される。
【0011】
上述のデータは、非接触データ伝送装置105を通して、ガントリ100の外部のコンソールに収容された前処理デバイス106に送られる。前処理デバイス106は、生データに対して感度補正などの特定の補正を実行する。次に、その結果として生成されるデータ(実測された投影データ(計測データ))を、記憶デバイス112が再構成処理の直前の段階で記憶する。記憶デバイス112は、再構成デバイス114、表示デバイス116、入力デバイス115、およびスキャンプラン支援装置200と共に、データ/制御バスを介してシステムコントローラ110に接続される。スキャンプラン支援装置200は、撮像技師がスキャンプランを策定するのを支援するための機能を含む。ボリューム画像再構成の場合、逐次近似アルゴリズムとしては、全変動(TV)最小化逐次近似再構成アルゴリズムがある。逐次近似再構成法には、さらに、代数的再構成法(ART)、同時代数的再構成法(SART)、またはオーダードサブセット同時代数的再構成法(OS−SART)がある。
【0012】
再構成デバイス114の一実施形態は、種々のソフトウェア構成要素とハードウェア構成要素とをさらに含む。本実施形態によれば、CT装置の再構成デバイス114は、有利には、逐次近似再構成法を用いて全変動(TV)を最小化する。一般に、本実施形態の再構成デバイス114は、全変動逐次近似再構成(TVIR)アルゴリズムを実施する。TVIRアルゴリズムは、投影データに対して、オーダードサブセット同時代数的再構成法(OS−SART)ステップと、TV最小化ステップとを実行する。この2つのステップは、繰り返し回数があらかじめ設定されているメインループにおいて連続して実施される。
【0013】
TV最小化ステップの前に、投影データは、オーダードサブセット同時代数的再構成法(OS−SART)に供される。投影データは、それぞれ特定数のビューを有する所定数のサブセットNにグループ化される。一実施形態では、オーダードサブセット同時代数的再構成法(OS−SART)の実施中に、各サブセットが連続して処理されてもよい。別の実施形態では、複数のサブセットは、複数の中央処理装置(CPU)または1つのグラフィック処理装置(GPU)などの特定のマイクロプロセッサを利用して並列に処理されてもよい。
【0014】
再構成デバイス114はまた、オーダードサブセット同時代数的再構成法(OS−SART)の実施中に、2つの主要な演算を実行する。すなわち、再構成デバイス114は、各サブセットNに対して、計算上の投影データを生成するために画像ボリュームを再投影し、更新画像ボリュームを再構成するために、計測された投影データと計算上の投影データとの正規化された差分を逆投影する。さらに詳細には、再構成デバイス114の一実施形態では、システム行列の係数がキャッシュされないレイトレーシング法を用いることによって、画像ボリュームを再投影する。さらに、再構成デバイス114の一実施形態では、サブセット内のすべてのレイを同時に再投影する。この処理は任意選択で並列に実施される。逆投影において、再構成デバイス114の一実施形態では、所望の更新画像ボリュームを生成する目的でサブセット内のすべての正規化された差分投影データを逆投影するためにピクセルドリブン(pixel-driven)法を用いる。再構成デバイス114が、画像ボリュームを生成するためにサブセット内のすべてのレイサム(すなわち差分投影データ)を逆投影するので、この演算も任意選択で並列に実施される。これらの演算は、単一のOS−SARTステップを完了するために、すべてのサブセットNに適用される。このおよびその他の実施形態は、任意選択で、添付の特許請求の範囲においてより詳細に記載されている本実施形態の範囲に含まれる。
【0015】
全変動(TV)最小化ステップにおいて、再構成デバイス114の一実施形態では、現在の画像ボリュームの目的関数が前の画像ボリュームの目的関数より小さくなるように正のステップ幅(step size)を探索するために直線探索方式(line search strategy)を用いる。
【0016】
本実施形態は、所定の技法を使用してコンピュータ断層撮影画像の軸方向アーチファクトを実質的に低減させるための種々のソフトウェアモジュールとハードウェア構成要素とをさらに含む。本実施形態によれば、CT装置の軸方向アーチファクトデバイス117は、有利には、コーンビームデータに対して軸方向アーチファクト低減ステップを実行する。一実施形態では、軸方向アーチファクト低減デバイス117は、データ/制御バスを介して、他のソフトウェアモジュール、ならびに/または記憶デバイス112、再構成デバイス114、表示デバイス116、および入力デバイス115などのシステム構成要素に動作的に接続される。この点に関して、他の実施形態では、軸方向アーチファクト低減デバイス117単独では、必ずしも軸方向アーチファクト低減機能および/またはそれに関連するタスクを実行しない。そのうえ、代替実施形態では、軸方向アーチファクト低減デバイス117は、任意選択で再構成デバイス114などの他のデバイスの一部である。
【0017】
一般に、CTの投影データは、所定の対数変換処理の後で利用可能である。この対数変換処理では、スキャンされた物体によって減衰された、計測されたX線強度信号を線積分データに変換する。その後、この線積分データから、既知の数学的反転方法によってCT画像が再構成される。つまり、軸方向アーチファクト低減デバイス117は、計測されたX線強度信号への直接アクセスを有する。
【0018】
軸方向アーチファクト低減デバイス117は、本実施形態において、不十分な実測された投影データ(計測データ)を軸方向に拡張する。従来技術の問題について図1を参照して説明したように、軸方向アーチファクトの1つの主な原因は、従来の円軌道スキャンジオメトリにおけるコーンビーム線源が原因で計測データが不十分であることである。線源Sが所定の垂直軸Zのまわりを回転するとき、X線によって照射される画像ボリュームは、レイp1、p2、p3、およびp4によって規定される。この点に関して、すべてのレイが0から2πの角度範囲内で網掛け領域Aを透過するわけではないので、領域Aはフルスキャン方式で十分に照射されない。網掛け領域Aの不十分なデータを補うために、軸方向アーチファクト低減デバイス117の一実施形態では、実測された計測データに対して軸方向の先方(top)および末尾(bottom)に所定数の列の追加データを追加することによって実測された計測データをz軸方向に拡張する。軸方向アーチファクト低減デバイス117の一実施形態では、検出器の端に対応する端列の計測データからデータをコピーすることによって追加データを生成する。軸方向アーチファクト低減デバイス117の別の実施形態では、検出器の端に対応する端列近傍の使用可能な計測データに基づいてデータを外挿することによって追加データを生成する。このように、軸方向アーチファクト低減デバイス117の実施形態では、最初に計測されたデータと追加データに基づいて拡張データを生成する。
【0019】
同様に、本実施形態では、軸方向アーチファクト低減デバイス117は、逐次近似再構成処理中に用いられるべき重み付け関数の選択および重み値の生成に関連するタスクも実行する。特定の実施形態では、軸方向アーチファクト低減デバイス117は、拡張データを検証する関数を決定する。1つの例示的な関数は、検出器行座標または拡張された検出器行座標などの軸方向位置に基づく。例示的な重み付けの1つの目的は、追加データの重みまたは妥当性(validity)を減少させることと、計測データの全重みまたは完全な妥当性を維持することである。重み付け関数は、任意選択で、コーン角の広がり方向に関する軸方向に沿ってその軸方向の位置に応じた重み付けおよび検出光子数に基づいた統計学的重み付けなどの所定の関数を組み合わせたものである。そのうえ、他の実施形態では、再構成デバイス114は、任意選択で、逐次近似再構成処理の前またはその実行中に重み付け関数を決定する。
【0020】
軸方向アーチファクト低減デバイス117または再構成デバイス114のいずれかまたはその両方は、逐次近似再構成処理の前に所定の重みを用いて重みを、または拡張データを用いて検証関数を決定する。一実施形態では、対応する重みは、事前に生成および記憶される。
【0021】
さらに図2を参照すると、軸方向アーチファクト低減デバイス117または再構成デバイス114のいずれかまたはその両方は、逐次近似再構成処理中に所定の重みの組み合わせを画像のインスタンスに適用する。一実施形態では、この重みは、事前に生成および記憶される。あるいは、別の実施形態では、この重みは実行中に生成される。たとえば、重みの組み合わせは、本実施形態による所定のノイズモデルと所定の窓関数とに基づく2つの関数を用いて生成される。
【0022】
所定の逐次近似再構成法では、軸方向アーチファクト低減デバイス117または再構成デバイス114のいずれかまたはその両方は、逐次近似で最初に用いられるべきシード画像(seed image)を生成する。一例は、Z方向範囲が拡張された、解析的フィルタ補正逆投影の行われた画像ボリューム(analytic filtered-backprojection image volume)(FBPシード)である。FBPシードの再構成の詳細は、2011年5月5日に公開された米国特許出願公開第2011/0103662A1号に開示されている拡張Z方向範囲を必要とする。米国特許第2011/0103662号の開示は、外部参照により本出願の一部として本明細書に組み込まれる。
【0023】
次に図3を参照すると、フロー図は、本実施形態における軸方向アーチファクトを実質的に低減するための逐次近似再構成処理に関与する全般的なステップを示す。ステップS100では、計測データが、所定の円形軌道を進む線源を用いて収集される。この線源は、所定のコーン角でX線を照射する。一実施形態では、次に、計測データが記憶デバイスに投影データとして記憶される。
【0024】
ステップS110では、計測データが、データ収集ステップS100中にトランケーションされたコーンビームにより不十分性が生じるために拡張される。従来技術の問題について図1を参照して説明したように、軸方向アーチファクトの1つの主な原因は、円軌道コーンビームスキャンジオメトリが原因で計測データが不十分であることである。特定の領域の不十分なデータを補うために、一実施形態では、計測データの先頭および末尾に所定数の列の追加データを追加することによって、投影データがz軸方向に拡張される。このように、ステップS110の実施形態では、最初に計測されたデータおよび追加データに基づいて拡張データを生成する。
【0025】
ステップS120では、一実施形態において、本実施形態で再構成が開始される前に逐次近似処理中に用いられるべき重み付け関数の選択および重み値の決定するに関連するタスクを実行する。特定の実施形態では、検証関数は、追加データより計測データを優先する。1つの例示的な検証関数は、検出器の軸方向位置または検出器行に基づく。例示的な重み付けの1つの目的は、追加データの重みまたは妥当性を減少させることと、最初に計測されたデータの全重みまたは完全な妥当性を維持することである。重み付け関数は、任意選択で、上述の軸方向位置に基づいた重み付けおよび検出光子数に基づいた統計学的重み付けなどの所定の関数を組み合わせたものである。そのうえ、他の実施形態では、再構成デバイス114は、任意選択で、逐次近似再構成処理の前またはその実行中に窓重み付け関数を決定する。
【0026】
最後に、ステップS130では、本実施形態により軸方向アーチファクトを実質的に低減するために、拡張されたが検証されたデータに基づいて画像を逐次近似再構成する。一実施形態では、重みは事前に生成され、この重みは、逐次近似再構成処理中に画像のインスタンスに適用される。あるいは、ステップS130の別の実施形態では、この重みは実行中に生成される。
【0027】
次に図4を参照すると、フロー図は、本実施形態における軸方向アーチファクトを実質的に低減するための拡張データの生成および検証に関与するやや詳細なステップを示す。拡張データは、最初に計測されたデータと、追加として生成されたデータとを含む。ステップS112では、追加データをどのようにして生成するかが決定される。つまり、ステップS112では、追加データを計測データに追加するための特定のルールまたは基準を決定する。特定の一実装形態では、ステップS114で、追加データが、検出器の端に対応する端列の計測データの一部からデータをコピーすることによって、ステップS112の基準に従って生成される。別の実装形態では、ステップS114で、追加データが、検出器の端に対応する端列近傍の使用可能な計測データに基づいてステップS112の基準に従ってデータを外挿することによって生成される。このように、ステップS114では、最初に計測されたデータと新たに合成されたデータとを含む拡張データを生成する。
【0028】
さらに図4を参照すると、ステップS122では、ステップS114からの拡張データを検証する関数を決定する。1つの特定の実装態様では、1つの例示的な検証関数は、検出器行に基づいて重みを生成するための所定の関数である。さらに詳細には、ComputeAxialWeight()などの1つの例示の検証関数は、以下のパラメータに基づいて実施される。
【0029】
Nseg:検出器行の数
SegTaper:傾きを制御する。提案する1つの値はNseg/4である。
【0030】
Seg:検出器行座標、0<=seg<Nseg
segX:拡張された検出器行座標、0<=seg<NsegX
ch:検出器列座標、0<=ch<Nch
たとえば、1つの特定の実装形態では、軸方向重みすなわちSegWeightは、検出器行座標および検出器列座標それぞれに対して以下の一連のパラメータ値、すなわちNseg=320、NsegX=400、Nch=896、およびSegTaper=80を用いて、以下の条件に従って決定される。
【数1】

【0031】
そのうえ、検証関数は、任意選択で、重み関数を組み合わせたものである。たとえば、以下の式(1)に示すように、TotalWeight関数は所定のAxialWeight関数と所定のStatWeight関数の積である。
【数2】
【0032】
上式で、col、row、およびviewはそれぞれ、計測データまたは投影データの所与の部分の検出器列位置、検出器行位置、およびビュー位置を表す。AxialWeight関数は、追加データの重みまたは妥当性が減少するが計測データの重みまたは妥当性が完全を保つように検出器位置に依拠する。一方、StatWeightは、所定のノイズモデルに従う統計関数である。たとえば、以下の式(2)は、1つのStatWeight関数を規定する。
【数3】
【0033】
上式で、I=RawCount(col,row,view)であり、Ve=電子ノイズ分散値であり、W=検出器の分散利得(detector variance gain)である。
【0034】
さらに図4を参照すると、ステップS124では、逐次近似再構成処理中に重みを画像のインスタンスに適用する。一実施形態では、この重みは、ステップS122の前に事前に生成および記憶される。あるいは、別の実施形態では、この重みはステップS124において実行中に生成される。いずれの場合にも、ボクセルに依存しない固定の重みは、逐次近似中の逆投影で適用される。一例では、重みは、以下の式(3)
【数4】
【0035】
に表すOS−SARTの修正版を用いて適用され、上式で、
【数5】
【0036】
および
【数6】
【0037】
はそれぞれ、(n+1)回目およびn回目の逐次近似における再構成画像xのj番目の要素の値を示し、パラメータλnは緩和パラメータであり、数量wiは各投影データに割り当てられた重みである。Aは、項目がai,jによって示される、X線投影処理に類似したシステム行列である。本実施形態による逐次近似再構成法は、OS−SARTに限定されず、SART、EM、またはMAPなどの他の既知の逐次近似法を含む。
【0038】
本実施形態によれば、所定の逐次近似再構成法では、シード画像は任意選択で、逐次近似のために生成される。一例は、Z方向範囲が拡張された、解析的フィルタ補正逆投影の行われた画像ボリューム(FBPシード)である。FBPシードの再構成の詳細は、2011年5月5日に公開された米国特許出願公開第2011/0103662A1号に開示されている拡張Z方向範囲を必要とする。米国特許第2011/0103662号の開示は、外部参照により本出願の一部として本明細書に組み込まれる。あるいは、本実施形態の別の実施形態では、ゼロシード(ゼロ画像)が逐次近似に用いられる。
【0039】
図5は、本実施形態により軸方向アーチファクトを実質的に低減するための検出器行の関数として軸方向重みの例示的な検証関数を示す図である。これは1つの検証関数の例示に過ぎず、本実施形態は特定の関数に限定されない。
【0040】
図6Aは、かなりの軸方向アーチファクトが画像ボリュームの上部および下部に見られる、胸部の逐次近似再構成画像である。撮像視野は500mmである。画像は、上述の検証方式のいずれも実行されずに逐次近似再構成が行われているので、画像は軸方向アーチファクトを示す。
【0041】
図6Bは、本実施形態により軸方向アーチファクトが実質的に低減された、胸部の逐次近似再構成画像である。撮像視野は500mmである。画像は、本実施形態による上述の検証方式の1つを実行して逐次近似再構成が行われているので、画像は実質的に低減された量の軸方向アーチファクトを示す。
【0042】
図7Aは、かなりの軸方向アーチファクトが画像ボリュームの上部および下部に見られる、腹部の逐次近似再構成画像である。撮像視野は500mmである。画像は、上述の検証方式のいずれも実行されずに逐次近似再構成が行われているので、画像は軸方向アーチファクトを示す。
【0043】
図7Bは、本実施形態により軸方向アーチファクトが実質的に低減された、腹部の逐次近似再構成画像である。撮像視野は500mmである。画像は、本実施形態による上述の検証方式の1つを実行して逐次近似再構成が行われているので、画像は実質的に低減された量の軸方向アーチファクトを示す。
【0044】
しかし、本実施形態の多数の特徴および利点が本実施形態の構造および機能の詳細と共に前述の説明に記載されているが、本開示は例示に過ぎないこと、さらに、詳細、特に部品の形状、大きさ、および構成、ならびにソフトウェア、ハードウェア、またはその両方の組み合わせにおける実装形態に関して、変更を加えることができるが、この変更は、添付の特許請求の範囲が表現される用語の広い一般的な意味によって最大限示される本発明の原理内に含まれることを理解されたい。
【技術分野】
【0001】
本発明は、一般に画像処理およびシステムに関し、より詳細には、最初に計測されたコーンビームデータがZ軸方向範囲を実質的に増やすために拡張された後で所定の逐次近似再構成法に特定の重みを適用することに関する。
【背景技術】
【0002】
逐次近似再構成(IR)法を用いて円軌道コーンビームデータからz軸方向に沿って長い物体の画像を再構成することは、従来技術においてよく知られている課題である。この課題は、トランケーションされた計測データが原因でIRにおいて生じる軸方向アーチファクトの低減を必要とする。たとえば、撮像するべき物体が図1に示されているように支持円筒(support cylinder)に閉じ込められている場合、投影データは、従来の円軌道コーンビームスキャンジオメトリを用いて収集される。線源Sが所定の垂直軸Zのまわりを回転するとき、X線によって照射される画像ボリュームは、レイp1、p2、p3、およびp4によって規定される。この点に関して、すべてのレイが0から2πの角度範囲内で網掛け領域Aを透過するわけではないので、領域Aはフルスキャン方式で十分に照射されない。一般に、逐次近似再構成アルゴリズムでは、上述の不十分な計測データが原因で領域Aを正確に再構成できない。
【0003】
そのうえ、IRの反復性が軸方向アーチファクトの一因となる。IRは再投影を用いるので、繰り返しのインスタンス(instance)後に毎回、再構成視野(reconstruction field of view)の軸方向範囲が減少する。さらに図1を参照すると、レイp5は、所定の逐次近似再構成アルゴリズムを直接適用することにより六角形の領域Bを再構成するために用いられる。残念なことに、レイp5は領域Bと領域Aの両方を通過するので、領域Aにおけるある程度の誤差は、逐次近似処理(iteration process)の複数のインスタンスを通してレイp5を用いることによって領域Bに伝播する。したがって、領域Bにおいて、再構成された値は正確ではない。
【発明の概要】
【発明が解決しようとする課題】
【0004】
目的は、逐次近似再構成アルゴリズムを用いてコーンビームデータから再構成された画像の軸方向アーチファクトを実質的に低減することにある。
【課題を解決するための手段】
【0005】
本実施形態に係るコンピュータ断層撮影における逐次近似画像再構成の方法は、
a)実測された投影データに従って所定の軸に沿って追加データを追加することによって前記実測された投影データを拡張して拡張データを生成するステップと、
b)投影ビンのそれぞれにおいて前記拡張データに重みを付けるためにコーン角広がり方向に関する軸方向に重み成分を有する所定の関数に基づいて重みを生成するステップと、
c)所定の逐次近似再構成法に従って前記拡張データと前記重みとを用いて完全な軸方向範囲を有する画像ボリュームを逐次近似再構成するステップとを備える。
【図面の簡単な説明】
【0006】
【図1】マルチスライスX線CT装置またはスキャナにおいて円軌道コーンビームデータを用いて軸方向アーチファクトを発生させるための従来技術の問題の特定の状況を示す図。
【図2】本発明による、軸方向アーチファクトを実質的に低減するためのマルチスライスX線CT装置またはスキャナの一実施形態における特定の要素を示す図。
【図3】本発明による一実施形態における軸方向アーチファクトを実質的に低減するための逐次近似再構成処理に関与する全般的なステップを示すフロー図。
【図4】本発明による一実施形態における軸方向アーチファクトを実質的に低減するための拡張データの生成および検証に関与するやや詳細なステップを示すフロー図。
【図5】本発明により軸方向アーチファクトを実質的に低減するための検出器行の関数として軸方向重みの例示的な検証関数を示す図。
【図6A】かなりの軸方向アーチファクトが画像ボリュームの上部および下部に見られる、胸部の逐次近似再構成画像。
【図6B】本発明により軸方向アーチファクトが実質的に低減された、胸部の逐次近似再構成画像。
【図7A】かなりの軸方向アーチファクトが画像ボリュームの上部および下部に見られる、腹部の逐次近似再構成画像。
【図7B】本発明により軸方向アーチファクトが実質的に低減された、腹部の逐次近似再構成画像。
【発明を実施するための形態】
【0007】
ここで図面を参照すると、同じ参照番号はすべての図面を通して対応する構造を示すが、特に図2を参照すると、図は、ガントリ100と他のデバイスまたはユニットとを含む、本発明によるマルチスライスX線CT装置またはスキャナの一実施形態を示す。ガントリ100は、側面図にて示されており、X線管101と、環状フレーム102と、多列または2次元配列型のX線検出器103とをさらに含む。X線管101およびX線検出器103は、環状フレーム102上の対象(subject)Sを挟んで反対側に取り付けられ、環状フレーム102は、回転軸RAのまわりに回転可能に支持される。回転ユニット107は、フレーム102を0.4秒/回転などの高速で回転させ、対象Sは、軸RAに沿って、図示の紙面に対する奥行き方向または手前方向に移動される。
【0008】
マルチスライスX線CT装置は、X線管101がX線を生成するようにスリップリング108を介して管電圧をX線管101に印加する高電圧発生装置109をさらに含む。X線は対象Sに向かって照射され、対象Sの断面領域は円によって表されている。X線検出器103は、対象Sを透過した照射X線を検出するために、対象Sを挟んでX線管101の反対側にある。
【0009】
本発明の実施形態では、X線は、所定のコーンビーム角および所定のファンビーム角でX線管101から放射される。本発明による一実施形態では、線源101は、データ収集中に、円軌道コーンビームデータを収集するために所定の円形軌道を進む。本発明による別の実施形態では、線源101は、螺旋軌道コーンビームデータを収集するために所定の螺旋状軌道を進む。
【0010】
さらに図2を参照すると、X線CT装置またはスキャナは、X線検出器103からの検出された信号を処理するための他のデバイスをさらに含む。データ収集回路またはデータ収集システム(DAS)104は、各チャンネルに対してX線検出器103から出力された信号を電圧信号に変換し、それを増幅して、さらにデジタル信号に変換する。X線検出器103およびDAS104は、1回転あたりの所定の全投影数(TPPR:total number of projections per rotation)を、最大で900TPPR、900TPPRから1800TPPRの間、および900TPPRから3600TPPRの間とできるよう処理するように構成される。
【0011】
上述のデータは、非接触データ伝送装置105を通して、ガントリ100の外部のコンソールに収容された前処理デバイス106に送られる。前処理デバイス106は、生データに対して感度補正などの特定の補正を実行する。次に、その結果として生成されるデータ(実測された投影データ(計測データ))を、記憶デバイス112が再構成処理の直前の段階で記憶する。記憶デバイス112は、再構成デバイス114、表示デバイス116、入力デバイス115、およびスキャンプラン支援装置200と共に、データ/制御バスを介してシステムコントローラ110に接続される。スキャンプラン支援装置200は、撮像技師がスキャンプランを策定するのを支援するための機能を含む。ボリューム画像再構成の場合、逐次近似アルゴリズムとしては、全変動(TV)最小化逐次近似再構成アルゴリズムがある。逐次近似再構成法には、さらに、代数的再構成法(ART)、同時代数的再構成法(SART)、またはオーダードサブセット同時代数的再構成法(OS−SART)がある。
【0012】
再構成デバイス114の一実施形態は、種々のソフトウェア構成要素とハードウェア構成要素とをさらに含む。本実施形態によれば、CT装置の再構成デバイス114は、有利には、逐次近似再構成法を用いて全変動(TV)を最小化する。一般に、本実施形態の再構成デバイス114は、全変動逐次近似再構成(TVIR)アルゴリズムを実施する。TVIRアルゴリズムは、投影データに対して、オーダードサブセット同時代数的再構成法(OS−SART)ステップと、TV最小化ステップとを実行する。この2つのステップは、繰り返し回数があらかじめ設定されているメインループにおいて連続して実施される。
【0013】
TV最小化ステップの前に、投影データは、オーダードサブセット同時代数的再構成法(OS−SART)に供される。投影データは、それぞれ特定数のビューを有する所定数のサブセットNにグループ化される。一実施形態では、オーダードサブセット同時代数的再構成法(OS−SART)の実施中に、各サブセットが連続して処理されてもよい。別の実施形態では、複数のサブセットは、複数の中央処理装置(CPU)または1つのグラフィック処理装置(GPU)などの特定のマイクロプロセッサを利用して並列に処理されてもよい。
【0014】
再構成デバイス114はまた、オーダードサブセット同時代数的再構成法(OS−SART)の実施中に、2つの主要な演算を実行する。すなわち、再構成デバイス114は、各サブセットNに対して、計算上の投影データを生成するために画像ボリュームを再投影し、更新画像ボリュームを再構成するために、計測された投影データと計算上の投影データとの正規化された差分を逆投影する。さらに詳細には、再構成デバイス114の一実施形態では、システム行列の係数がキャッシュされないレイトレーシング法を用いることによって、画像ボリュームを再投影する。さらに、再構成デバイス114の一実施形態では、サブセット内のすべてのレイを同時に再投影する。この処理は任意選択で並列に実施される。逆投影において、再構成デバイス114の一実施形態では、所望の更新画像ボリュームを生成する目的でサブセット内のすべての正規化された差分投影データを逆投影するためにピクセルドリブン(pixel-driven)法を用いる。再構成デバイス114が、画像ボリュームを生成するためにサブセット内のすべてのレイサム(すなわち差分投影データ)を逆投影するので、この演算も任意選択で並列に実施される。これらの演算は、単一のOS−SARTステップを完了するために、すべてのサブセットNに適用される。このおよびその他の実施形態は、任意選択で、添付の特許請求の範囲においてより詳細に記載されている本実施形態の範囲に含まれる。
【0015】
全変動(TV)最小化ステップにおいて、再構成デバイス114の一実施形態では、現在の画像ボリュームの目的関数が前の画像ボリュームの目的関数より小さくなるように正のステップ幅(step size)を探索するために直線探索方式(line search strategy)を用いる。
【0016】
本実施形態は、所定の技法を使用してコンピュータ断層撮影画像の軸方向アーチファクトを実質的に低減させるための種々のソフトウェアモジュールとハードウェア構成要素とをさらに含む。本実施形態によれば、CT装置の軸方向アーチファクトデバイス117は、有利には、コーンビームデータに対して軸方向アーチファクト低減ステップを実行する。一実施形態では、軸方向アーチファクト低減デバイス117は、データ/制御バスを介して、他のソフトウェアモジュール、ならびに/または記憶デバイス112、再構成デバイス114、表示デバイス116、および入力デバイス115などのシステム構成要素に動作的に接続される。この点に関して、他の実施形態では、軸方向アーチファクト低減デバイス117単独では、必ずしも軸方向アーチファクト低減機能および/またはそれに関連するタスクを実行しない。そのうえ、代替実施形態では、軸方向アーチファクト低減デバイス117は、任意選択で再構成デバイス114などの他のデバイスの一部である。
【0017】
一般に、CTの投影データは、所定の対数変換処理の後で利用可能である。この対数変換処理では、スキャンされた物体によって減衰された、計測されたX線強度信号を線積分データに変換する。その後、この線積分データから、既知の数学的反転方法によってCT画像が再構成される。つまり、軸方向アーチファクト低減デバイス117は、計測されたX線強度信号への直接アクセスを有する。
【0018】
軸方向アーチファクト低減デバイス117は、本実施形態において、不十分な実測された投影データ(計測データ)を軸方向に拡張する。従来技術の問題について図1を参照して説明したように、軸方向アーチファクトの1つの主な原因は、従来の円軌道スキャンジオメトリにおけるコーンビーム線源が原因で計測データが不十分であることである。線源Sが所定の垂直軸Zのまわりを回転するとき、X線によって照射される画像ボリュームは、レイp1、p2、p3、およびp4によって規定される。この点に関して、すべてのレイが0から2πの角度範囲内で網掛け領域Aを透過するわけではないので、領域Aはフルスキャン方式で十分に照射されない。網掛け領域Aの不十分なデータを補うために、軸方向アーチファクト低減デバイス117の一実施形態では、実測された計測データに対して軸方向の先方(top)および末尾(bottom)に所定数の列の追加データを追加することによって実測された計測データをz軸方向に拡張する。軸方向アーチファクト低減デバイス117の一実施形態では、検出器の端に対応する端列の計測データからデータをコピーすることによって追加データを生成する。軸方向アーチファクト低減デバイス117の別の実施形態では、検出器の端に対応する端列近傍の使用可能な計測データに基づいてデータを外挿することによって追加データを生成する。このように、軸方向アーチファクト低減デバイス117の実施形態では、最初に計測されたデータと追加データに基づいて拡張データを生成する。
【0019】
同様に、本実施形態では、軸方向アーチファクト低減デバイス117は、逐次近似再構成処理中に用いられるべき重み付け関数の選択および重み値の生成に関連するタスクも実行する。特定の実施形態では、軸方向アーチファクト低減デバイス117は、拡張データを検証する関数を決定する。1つの例示的な関数は、検出器行座標または拡張された検出器行座標などの軸方向位置に基づく。例示的な重み付けの1つの目的は、追加データの重みまたは妥当性(validity)を減少させることと、計測データの全重みまたは完全な妥当性を維持することである。重み付け関数は、任意選択で、コーン角の広がり方向に関する軸方向に沿ってその軸方向の位置に応じた重み付けおよび検出光子数に基づいた統計学的重み付けなどの所定の関数を組み合わせたものである。そのうえ、他の実施形態では、再構成デバイス114は、任意選択で、逐次近似再構成処理の前またはその実行中に重み付け関数を決定する。
【0020】
軸方向アーチファクト低減デバイス117または再構成デバイス114のいずれかまたはその両方は、逐次近似再構成処理の前に所定の重みを用いて重みを、または拡張データを用いて検証関数を決定する。一実施形態では、対応する重みは、事前に生成および記憶される。
【0021】
さらに図2を参照すると、軸方向アーチファクト低減デバイス117または再構成デバイス114のいずれかまたはその両方は、逐次近似再構成処理中に所定の重みの組み合わせを画像のインスタンスに適用する。一実施形態では、この重みは、事前に生成および記憶される。あるいは、別の実施形態では、この重みは実行中に生成される。たとえば、重みの組み合わせは、本実施形態による所定のノイズモデルと所定の窓関数とに基づく2つの関数を用いて生成される。
【0022】
所定の逐次近似再構成法では、軸方向アーチファクト低減デバイス117または再構成デバイス114のいずれかまたはその両方は、逐次近似で最初に用いられるべきシード画像(seed image)を生成する。一例は、Z方向範囲が拡張された、解析的フィルタ補正逆投影の行われた画像ボリューム(analytic filtered-backprojection image volume)(FBPシード)である。FBPシードの再構成の詳細は、2011年5月5日に公開された米国特許出願公開第2011/0103662A1号に開示されている拡張Z方向範囲を必要とする。米国特許第2011/0103662号の開示は、外部参照により本出願の一部として本明細書に組み込まれる。
【0023】
次に図3を参照すると、フロー図は、本実施形態における軸方向アーチファクトを実質的に低減するための逐次近似再構成処理に関与する全般的なステップを示す。ステップS100では、計測データが、所定の円形軌道を進む線源を用いて収集される。この線源は、所定のコーン角でX線を照射する。一実施形態では、次に、計測データが記憶デバイスに投影データとして記憶される。
【0024】
ステップS110では、計測データが、データ収集ステップS100中にトランケーションされたコーンビームにより不十分性が生じるために拡張される。従来技術の問題について図1を参照して説明したように、軸方向アーチファクトの1つの主な原因は、円軌道コーンビームスキャンジオメトリが原因で計測データが不十分であることである。特定の領域の不十分なデータを補うために、一実施形態では、計測データの先頭および末尾に所定数の列の追加データを追加することによって、投影データがz軸方向に拡張される。このように、ステップS110の実施形態では、最初に計測されたデータおよび追加データに基づいて拡張データを生成する。
【0025】
ステップS120では、一実施形態において、本実施形態で再構成が開始される前に逐次近似処理中に用いられるべき重み付け関数の選択および重み値の決定するに関連するタスクを実行する。特定の実施形態では、検証関数は、追加データより計測データを優先する。1つの例示的な検証関数は、検出器の軸方向位置または検出器行に基づく。例示的な重み付けの1つの目的は、追加データの重みまたは妥当性を減少させることと、最初に計測されたデータの全重みまたは完全な妥当性を維持することである。重み付け関数は、任意選択で、上述の軸方向位置に基づいた重み付けおよび検出光子数に基づいた統計学的重み付けなどの所定の関数を組み合わせたものである。そのうえ、他の実施形態では、再構成デバイス114は、任意選択で、逐次近似再構成処理の前またはその実行中に窓重み付け関数を決定する。
【0026】
最後に、ステップS130では、本実施形態により軸方向アーチファクトを実質的に低減するために、拡張されたが検証されたデータに基づいて画像を逐次近似再構成する。一実施形態では、重みは事前に生成され、この重みは、逐次近似再構成処理中に画像のインスタンスに適用される。あるいは、ステップS130の別の実施形態では、この重みは実行中に生成される。
【0027】
次に図4を参照すると、フロー図は、本実施形態における軸方向アーチファクトを実質的に低減するための拡張データの生成および検証に関与するやや詳細なステップを示す。拡張データは、最初に計測されたデータと、追加として生成されたデータとを含む。ステップS112では、追加データをどのようにして生成するかが決定される。つまり、ステップS112では、追加データを計測データに追加するための特定のルールまたは基準を決定する。特定の一実装形態では、ステップS114で、追加データが、検出器の端に対応する端列の計測データの一部からデータをコピーすることによって、ステップS112の基準に従って生成される。別の実装形態では、ステップS114で、追加データが、検出器の端に対応する端列近傍の使用可能な計測データに基づいてステップS112の基準に従ってデータを外挿することによって生成される。このように、ステップS114では、最初に計測されたデータと新たに合成されたデータとを含む拡張データを生成する。
【0028】
さらに図4を参照すると、ステップS122では、ステップS114からの拡張データを検証する関数を決定する。1つの特定の実装態様では、1つの例示的な検証関数は、検出器行に基づいて重みを生成するための所定の関数である。さらに詳細には、ComputeAxialWeight()などの1つの例示の検証関数は、以下のパラメータに基づいて実施される。
【0029】
Nseg:検出器行の数
SegTaper:傾きを制御する。提案する1つの値はNseg/4である。
【0030】
Seg:検出器行座標、0<=seg<Nseg
segX:拡張された検出器行座標、0<=seg<NsegX
ch:検出器列座標、0<=ch<Nch
たとえば、1つの特定の実装形態では、軸方向重みすなわちSegWeightは、検出器行座標および検出器列座標それぞれに対して以下の一連のパラメータ値、すなわちNseg=320、NsegX=400、Nch=896、およびSegTaper=80を用いて、以下の条件に従って決定される。
【数1】
【0031】
そのうえ、検証関数は、任意選択で、重み関数を組み合わせたものである。たとえば、以下の式(1)に示すように、TotalWeight関数は所定のAxialWeight関数と所定のStatWeight関数の積である。
【数2】
【0032】
上式で、col、row、およびviewはそれぞれ、計測データまたは投影データの所与の部分の検出器列位置、検出器行位置、およびビュー位置を表す。AxialWeight関数は、追加データの重みまたは妥当性が減少するが計測データの重みまたは妥当性が完全を保つように検出器位置に依拠する。一方、StatWeightは、所定のノイズモデルに従う統計関数である。たとえば、以下の式(2)は、1つのStatWeight関数を規定する。
【数3】
【0033】
上式で、I=RawCount(col,row,view)であり、Ve=電子ノイズ分散値であり、W=検出器の分散利得(detector variance gain)である。
【0034】
さらに図4を参照すると、ステップS124では、逐次近似再構成処理中に重みを画像のインスタンスに適用する。一実施形態では、この重みは、ステップS122の前に事前に生成および記憶される。あるいは、別の実施形態では、この重みはステップS124において実行中に生成される。いずれの場合にも、ボクセルに依存しない固定の重みは、逐次近似中の逆投影で適用される。一例では、重みは、以下の式(3)
【数4】
【0035】
に表すOS−SARTの修正版を用いて適用され、上式で、
【数5】
【0036】
および
【数6】
【0037】
はそれぞれ、(n+1)回目およびn回目の逐次近似における再構成画像xのj番目の要素の値を示し、パラメータλnは緩和パラメータであり、数量wiは各投影データに割り当てられた重みである。Aは、項目がai,jによって示される、X線投影処理に類似したシステム行列である。本実施形態による逐次近似再構成法は、OS−SARTに限定されず、SART、EM、またはMAPなどの他の既知の逐次近似法を含む。
【0038】
本実施形態によれば、所定の逐次近似再構成法では、シード画像は任意選択で、逐次近似のために生成される。一例は、Z方向範囲が拡張された、解析的フィルタ補正逆投影の行われた画像ボリューム(FBPシード)である。FBPシードの再構成の詳細は、2011年5月5日に公開された米国特許出願公開第2011/0103662A1号に開示されている拡張Z方向範囲を必要とする。米国特許第2011/0103662号の開示は、外部参照により本出願の一部として本明細書に組み込まれる。あるいは、本実施形態の別の実施形態では、ゼロシード(ゼロ画像)が逐次近似に用いられる。
【0039】
図5は、本実施形態により軸方向アーチファクトを実質的に低減するための検出器行の関数として軸方向重みの例示的な検証関数を示す図である。これは1つの検証関数の例示に過ぎず、本実施形態は特定の関数に限定されない。
【0040】
図6Aは、かなりの軸方向アーチファクトが画像ボリュームの上部および下部に見られる、胸部の逐次近似再構成画像である。撮像視野は500mmである。画像は、上述の検証方式のいずれも実行されずに逐次近似再構成が行われているので、画像は軸方向アーチファクトを示す。
【0041】
図6Bは、本実施形態により軸方向アーチファクトが実質的に低減された、胸部の逐次近似再構成画像である。撮像視野は500mmである。画像は、本実施形態による上述の検証方式の1つを実行して逐次近似再構成が行われているので、画像は実質的に低減された量の軸方向アーチファクトを示す。
【0042】
図7Aは、かなりの軸方向アーチファクトが画像ボリュームの上部および下部に見られる、腹部の逐次近似再構成画像である。撮像視野は500mmである。画像は、上述の検証方式のいずれも実行されずに逐次近似再構成が行われているので、画像は軸方向アーチファクトを示す。
【0043】
図7Bは、本実施形態により軸方向アーチファクトが実質的に低減された、腹部の逐次近似再構成画像である。撮像視野は500mmである。画像は、本実施形態による上述の検証方式の1つを実行して逐次近似再構成が行われているので、画像は実質的に低減された量の軸方向アーチファクトを示す。
【0044】
しかし、本実施形態の多数の特徴および利点が本実施形態の構造および機能の詳細と共に前述の説明に記載されているが、本開示は例示に過ぎないこと、さらに、詳細、特に部品の形状、大きさ、および構成、ならびにソフトウェア、ハードウェア、またはその両方の組み合わせにおける実装形態に関して、変更を加えることができるが、この変更は、添付の特許請求の範囲が表現される用語の広い一般的な意味によって最大限示される本発明の原理内に含まれることを理解されたい。
【特許請求の範囲】
【請求項1】
コンピュータ断層撮影における逐次近似画像再構成の方法であって、
a)実測された投影データに従って所定の軸に沿って追加データを追加することによって前記実測された投影データを拡張して拡張データを生成するステップと、
b)投影ビンのそれぞれにおいて前記拡張データに重みを付けるためにコーン角広がり方向に関する軸方向に重み成分を有する所定の関数に基づいて重みを生成するステップと、
c)所定の逐次近似再構成法に従って前記拡張データと前記重みとを用いて完全な軸方向範囲を有する画像ボリュームを逐次近似再構成するステップと
を備える方法。
【請求項2】
前記追加データが、端列の1つに対応する所定数の列の同一データである、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項3】
前記追加データが外挿される、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項4】
前記所定の関数が、軸方向重み成分と統計学的重み成分の組み合わせを有する、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項5】
前記ステップc)において、前記拡張データに基づいて解析的フィルタ補正逆投影の行われた再構成画像である、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項6】
前記計測データが円形の線源軌道に沿って得られる、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項7】
前記計測データが螺旋状の線源軌道に沿って得られる、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項8】
前記所定の逐次近似再構成法としては、代数的再構成法(ART)型のアルゴリズム、同時代数的再構成法(SART)型のアルゴリズム、オーダードサブセット同時代数的再構成法(OS−SART)型のアルゴリズム、同時逐次近似再構成法(SIRT)型のアルゴリズム、期待値最大化法(EM)型のアルゴリズム、および罰則付き最小二乗法型のアルゴリズム(PLS)がある、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項9】
前記所定の逐次近似再構成がオーダードサブセット同時代数的再構成法(OS−SART)であり、前記OS−SARTが、
【数1】
のように、前記計測された投影データのi番目の計測された投影のためのdiによって示される前記妥当性重みによって重み付けされ、上式で、
【数2】
は、古い画像
【数3】
から更新された画像であり、λnは緩和係数であり、ai,jはシステム行列の要素であり、biはi番目の検出器ビンにおける前記拡張データの対数変換後のデータである、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項10】
コンピュータ断層撮影において画像を逐次再構成するためのシステムであって、
実測された投影データに従って所定の軸に沿って追加データを追加することによって前記実測された投影データを拡張して拡張データを生成するための軸方向アーチファクト低減デバイスであって、投影ビンのそれぞれにおいて前記拡張データに重みを付けるためにコーン角広がり方向に関する軸方向重み成分を有する所定の関数に基づいて重みを生成する軸方向アーチファクト低減デバイスと、
前記軸方向アーチファクト低減デバイスに接続された、所定の逐次近似再構成法に従って前記拡張データと前記重みとを用いて完全な軸方向範囲を有する画像ボリュームを逐次近似再構成するための再構成デバイスと
を備えるシステム。
【請求項11】
前記追加データが、端列の1つに対応する所定数の列の同一データである、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項12】
前記追加データが外挿される、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項13】
前記所定の関数が、軸方向重み成分と統計学的重み成分の組み合わせを有する、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項14】
前記所定の逐次近似再構成法のためのシードが、前記拡張データに基づいて解析的フィルタ補正逆投影の行われた再構成画像である、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項15】
前記計測データが円形の線源軌道に沿って得られる、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項16】
前記計測データが螺旋状の線源軌道に沿って得られる、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項17】
前記所定の逐次近似再構成法としては、代数的再構成法(ART)型のアルゴリズム、同時代数的再構成法(SART)型のアルゴリズム、オーダードサブセット同時代数的再構成法(OS−SART)型のアルゴリズム、同時逐次近似再構成法(SIRT)型のアルゴリズム、期待値最大化法(EM)型のアルゴリズム、および罰則付き最小二乗法型のアルゴリズム(PLS)がある、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項18】
前記所定の逐次近似再構成がオーダードサブセット同時代数的再構成法(OS−SART)であり、前記OS−SARTが、
【数4】
のように、前記計測された投影データのi番目の計測された投影のためのdiによって示される前記妥当性重みによって重み付けされ、上式で、
【数5】
は、古い画像
【数6】
から更新された画像であり、λnは緩和係数であり、ai,jはシステム行列の要素であり、biはi番目の検出器ビンにおける前記拡張データの対数変換後のデータである、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項1】
コンピュータ断層撮影における逐次近似画像再構成の方法であって、
a)実測された投影データに従って所定の軸に沿って追加データを追加することによって前記実測された投影データを拡張して拡張データを生成するステップと、
b)投影ビンのそれぞれにおいて前記拡張データに重みを付けるためにコーン角広がり方向に関する軸方向に重み成分を有する所定の関数に基づいて重みを生成するステップと、
c)所定の逐次近似再構成法に従って前記拡張データと前記重みとを用いて完全な軸方向範囲を有する画像ボリュームを逐次近似再構成するステップと
を備える方法。
【請求項2】
前記追加データが、端列の1つに対応する所定数の列の同一データである、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項3】
前記追加データが外挿される、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項4】
前記所定の関数が、軸方向重み成分と統計学的重み成分の組み合わせを有する、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項5】
前記ステップc)において、前記拡張データに基づいて解析的フィルタ補正逆投影の行われた再構成画像である、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項6】
前記計測データが円形の線源軌道に沿って得られる、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項7】
前記計測データが螺旋状の線源軌道に沿って得られる、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項8】
前記所定の逐次近似再構成法としては、代数的再構成法(ART)型のアルゴリズム、同時代数的再構成法(SART)型のアルゴリズム、オーダードサブセット同時代数的再構成法(OS−SART)型のアルゴリズム、同時逐次近似再構成法(SIRT)型のアルゴリズム、期待値最大化法(EM)型のアルゴリズム、および罰則付き最小二乗法型のアルゴリズム(PLS)がある、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項9】
前記所定の逐次近似再構成がオーダードサブセット同時代数的再構成法(OS−SART)であり、前記OS−SARTが、
【数1】
のように、前記計測された投影データのi番目の計測された投影のためのdiによって示される前記妥当性重みによって重み付けされ、上式で、
【数2】
は、古い画像
【数3】
から更新された画像であり、λnは緩和係数であり、ai,jはシステム行列の要素であり、biはi番目の検出器ビンにおける前記拡張データの対数変換後のデータである、請求項1に記載のコンピュータ断層撮影における逐次近似画像再構成の方法。
【請求項10】
コンピュータ断層撮影において画像を逐次再構成するためのシステムであって、
実測された投影データに従って所定の軸に沿って追加データを追加することによって前記実測された投影データを拡張して拡張データを生成するための軸方向アーチファクト低減デバイスであって、投影ビンのそれぞれにおいて前記拡張データに重みを付けるためにコーン角広がり方向に関する軸方向重み成分を有する所定の関数に基づいて重みを生成する軸方向アーチファクト低減デバイスと、
前記軸方向アーチファクト低減デバイスに接続された、所定の逐次近似再構成法に従って前記拡張データと前記重みとを用いて完全な軸方向範囲を有する画像ボリュームを逐次近似再構成するための再構成デバイスと
を備えるシステム。
【請求項11】
前記追加データが、端列の1つに対応する所定数の列の同一データである、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項12】
前記追加データが外挿される、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項13】
前記所定の関数が、軸方向重み成分と統計学的重み成分の組み合わせを有する、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項14】
前記所定の逐次近似再構成法のためのシードが、前記拡張データに基づいて解析的フィルタ補正逆投影の行われた再構成画像である、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項15】
前記計測データが円形の線源軌道に沿って得られる、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項16】
前記計測データが螺旋状の線源軌道に沿って得られる、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項17】
前記所定の逐次近似再構成法としては、代数的再構成法(ART)型のアルゴリズム、同時代数的再構成法(SART)型のアルゴリズム、オーダードサブセット同時代数的再構成法(OS−SART)型のアルゴリズム、同時逐次近似再構成法(SIRT)型のアルゴリズム、期待値最大化法(EM)型のアルゴリズム、および罰則付き最小二乗法型のアルゴリズム(PLS)がある、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【請求項18】
前記所定の逐次近似再構成がオーダードサブセット同時代数的再構成法(OS−SART)であり、前記OS−SARTが、
【数4】
のように、前記計測された投影データのi番目の計測された投影のためのdiによって示される前記妥当性重みによって重み付けされ、上式で、
【数5】
は、古い画像
【数6】
から更新された画像であり、λnは緩和係数であり、ai,jはシステム行列の要素であり、biはi番目の検出器ビンにおける前記拡張データの対数変換後のデータである、請求項10に記載のコンピュータ断層撮影において画像を逐次再構成するためのシステム。
【図1】

【図2】
【図3】
【図4】

【図5】

【図6A】

【図6B】
【図7A】
【図7B】
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7A】
【図7B】
【公開番号】特開2013−85962(P2013−85962A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2012−231042(P2012−231042)
【出願日】平成24年10月18日(2012.10.18)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成24年10月18日(2012.10.18)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]