
分析システムのためのセンサ位置合わせ装置

粒子の集団を分析する装置が説明される。この装置は、例えばレーザから、電磁放射ビームを発生させるようになっている放射源と、電磁放射ビームの経路内に配置されている粒子チャンバとを含む。この装置は、さらに、粒子チャンバによって散乱させられた電磁放射、または、他の形で粒子チャンバから受け取られた電磁放射を検出するためのセンサも含む。センサ位置合わせユニットが検出軸線に沿ってセンサを支持し、および、検出軸線に対して概ね垂直である平面内に位置している直交軸線に沿ったセンサの位置の調整を可能にする。一実施形態では、このセンサ位置合わせユニットは、第1の支持プラットホームと、第1の直交軸線に沿った第1の支持プラットホームの位置を調整するために配置されている第1の調整機構とを含む。このセンサ位置合わせユニットは、さらに、センサを支持する第2の支持プラットホームも含む。この第2の支持プラットホームは、この第2の支持プラットホームが第2の直交軸線に沿って移動することを可能にするように、第1の支持プラットホームに連結されている。第2の調整機構が、第2の直交軸線に沿った第1の支持プラットホームに対する第2の支持プラットホームの相対的な位置を調整するために設けられている。このようにして、センサの位置が、所望の粒子特徴の検出を最適化するために調整されることが可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的に、分析システムでの使用のためのセンサ位置合わせ装置に関する。さらに特に、フローサイトメータ内の電磁ビーム検出経路に沿って光検出器を支持および位置決めするセンサ位置合わせ装置が説明される。
【背景技術】
【0002】
生物細胞のような粒子の集団の1つまたは複数の特徴を測定するように設計されている装置が、実験室環境内において極めて一般的になっている。この装置は、様々な異なる分析方法を使用して様々な粒子タイプを分析するために使用可能である。例えば、特定の細胞特徴に関係するデータが、処理された生物細胞の集団の直接的な観察によって獲得されるだろう。この方法は、血液学的異常および疾病を診断するために使用されることが多い。間接的な仕方で生物学的および/または化学的データを獲得する別のタイプの分析システムが、人工粒子の集団を使用する。一般的に述べると、この前もって作られた粒子は球の形状である。この球は、反応性の表面被覆を有する非反応性のコアを含む。この表面被覆は、対象である分析物の化学成分と公知の仕方で反応してその球の蛍光発光のような特徴を変化させるように選択されている。この球は分析物に送り込まれ、および、その結果として生じる反応(または反応の失敗)が分析システムによって検出される。
【0003】
Rodriguez他に対する米国特許第5,125,737号が、粒子の流れが電磁放射エネルギーの点集束ビームの中に入れられて通過させられるフローサイトメータを説明している。この第5,125,737号特許は、本明細書に引例として組み入れられている。この装置の1つの実施態様が図1に示されている。この装置は、フローセル10を形成する細長い円筒形の部材を備える。このフローセル10は、例えば石英ガラス、石英、または、サファイアのような任意の光透過性材料で形成されることが可能である。このフローセル10の内側部分が、集束した流れ14として生物細胞サンプルが中を通過させられる狭窄穴すなわちネックダウン(necked−down)穴12を除いて、その長さ全体にわたって円筒形である。このフローセル10の外壁15は円筒形であり、かつ、光学定盤16を含む。レンズシステム18が、好ましくはレーザ22からの、電磁エネルギーのビーム20を穴12において点状に集束させる。散乱放射レセプタとして働く光検出器アセンブリ24が、レーザ放射電磁エネルギーのコミッション軸線(commission axis)26に対して直交しておりかつこの軸線を中心としている平面の中に配置されている。
【0004】
この光検出器アセンブリ24は、マスク28とビームダンプ30(不要なレーザ光を除去するための障害物)とを備える電磁センサによって構成されている。このマスク28は、異なる構成のフローセル10から同等の光散乱情報を得るために必要とされている通りの円形、楕円形、または、他の形状であることが可能である。このマスクは、レーザ光ビーム20と同中心に方向配置されている。ビームダンプ30は、図示されているレーザビームに面する光検出器アセンブリ24を水平方向に横断して延びる。このビームダンプ30は、より明瞭な信号対雑音出力を提供するために、中心からわずかに角度的に扇形に広げられることが可能である。
【0005】
動作時には、レーザ22によって放射される電磁放射がレンズシステム18の中を通過し、このレンズシステム18から、フローセル10の中を通過する粒子流の中を通過する。この電磁放射は粒子流14の粒子によって複数のビーム32の形に散乱させられる。様々な散乱角におけるビーム32の大きさが光検出器アセンブリ24によって検出される。一方、光検出器アセンブリ24は、そのビーム32の大きさに対応する電子信号を、後続の処理と変換とデータ分析とのための後続の電子回路に供給する。
【0006】
この装置の他の要素に対する光検出器アセンブリ24の相対的な位置が、上述のシステムの総合的な精度の重要な側面であることが現時点ですでに発見されている。現在まで、光検出器アセンブリ24の正確な位置決めは、極度に厳密な公差に製作される固定されたセンサ支持フレームを使用して実現されてきた。こうした厳密な製作交差は高コストあり、かつ、時として実現が困難である。したがって、この固定されたセンサ支持物という手法の代わりとなる代替物が望ましい。
【発明の開示】
【発明が解決しようとする課題】
【0007】
粒子の集団を分析する装置を説明する。
【課題を解決するための手段】
【0008】
この装置は、例えばレーザから、電磁放射ビームを発生させるようになっている放射源と、電磁放射ビームの経路内に配置されている粒子チャンバとを含む。この装置は、さらに、粒子チャンバによって散乱させられた電磁放射、または、他の形で粒子チャンバから受け取られた電磁放射を検出するためのセンサも含む。センサ位置合わせユニットが検出軸線に沿ってセンサを支持し、および、検出軸線に対して概ね垂直である平面内に位置している直交軸線に沿ったセンサの位置の調整を可能にする。一実施態様では、このセンサ位置合わせユニットは、第1の支持プラットホームと、第1の直交軸線に沿った第1の支持プラットホームの位置を調整するために配置されている第1の調整機構とを含む。このセンサ位置合わせユニットは、さらに、センサを支持する第2の支持プラットホームも含む。この第2の支持プラットホームは、この第2の支持プラットホームが第2の直交軸線に沿って移動することを可能にするように、第1の支持プラットホームに連結されている。第2の調整機構は、第2の直交軸線に沿った第1の支持プラットホームに対する第2の支持プラットホームの相対的な位置を調整するために備えられている。このようにして、センサの位置が、所望の粒子特徴の検出を最適化するために調整されることが可能である。
【発明を実施するための最良の形態】
【0009】
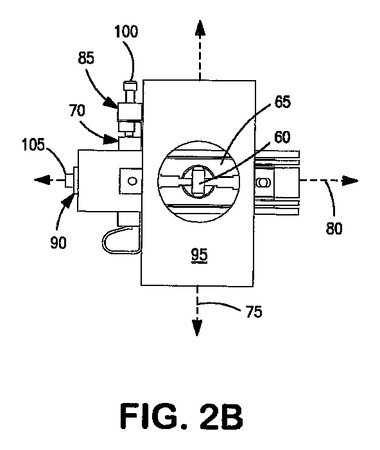
図2Aから図2Cは、40で全体的に示されている、粒子集団を分析するための装置の一実施形態を示す。この装置40の幾つかの構成要素が、上述したRodriguez他に対する米国特許第5,125,737号に示されている装置に見い出せる対応する構成要素に類似している。この目的のために、装置40は、電磁放射源45と集束システム50とを含む。この電磁放射源45と集束システム50は、放射軸線55に沿って電磁放射ビームを方向付けるようになっている。粒子チャンバ60が、集束システム50とセンサ65との間に放射軸線55に沿って配置されている。粒子チャンバ60の中を通過して流れる粒子が、放射軸線55に沿って供給される電磁放射に影響を与える。センサ65は、電磁スペクトル中の1つまたは複数の波長の電磁放射を検出するようになっている。これらの波長は、例えば、放射源45によって発生させられた電磁放射の波長に直接的に合致してもよく、または、この代わりに、分析される粒子が粒子チャンバ60を通過して流れる時にこの粒子によって発生させられる蛍光放射の波長に合致してもよい。センサ65によって受け取られる電磁放射は、検出軸線に沿って粒子チャンバ60から供給される。図示している実施形態では、この検出軸線と放射軸線55は互いに同一である。
【0010】
装置フレームとの絶対的な固定された関係において(および、したがって、検出軸線55との絶対的な固定された関係において)センサ65を支持する従来の装置とは違って、装置40のセンサ65は、センサ位置合わせユニット70に固定されている。このセンサ位置合わせユニット70は、検出軸線55に対して概ね垂直である平面内に位置している直交軸線75、80に沿ったセンサ65の位置の調整を可能にするようになっている。
【0011】
図示されている実施形態では、センサ位置合わせユニット70は、垂直調整アセンブリ85と水平調整アセンブリ90とを含む。垂直調整アセンブリ85は固定フレーム部材95によって支持されており、および、センサ65の位置が垂直軸線75に沿って調整されることを可能にする調整ねじ100を備えている。水平調整アセンブリ90は、垂直調整アセンブリ85によって支持されており、および、センサ65の位置が水平軸線80に沿って調整されることを可能にする別の調整ねじ105を備えている。
【0012】
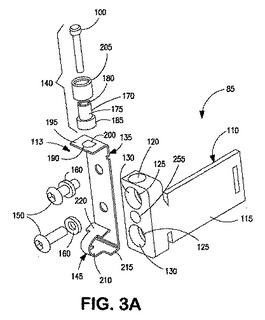
垂直調整アセンブリ85を形成する特定の要素が図3Aから図3Cに示されている。概略的に述べると、図示されている実施形態の垂直調整アセンブリ85は支持プラットホーム110と調整機構113とを含む。この支持プラットホーム110は、水平調整アセンブリ90が取り付けられる溝117を有する取り付け基部115を含む。連結肩部120が基部115の末端から直角に延びる。1つまたは複数の穴125が連結肩部120を貫通している。各々の穴125は対応する皿穴130を含む。
【0013】
調整機構113は、そのブラケットの第1の末端に配置されているねじ駆動装置140と、そのブラケットの第2の末端に配置されている戻しばね145とを有する、ブラケット135を含む。1対のセキュアメント(securement)150が穴125の中を貫通して延びて、ブラケット135をフレーム部材95に取り付ける。穴125とセキュアメント150は、穴125に沿った連結肩部120の垂直移動を可能にし、実際上は、穴125が支持プラットホーム110の垂直移動のための案内溝として機能することを可能にするような大きさにされている。
【0014】
軸線75に沿った、連結肩部120の垂直位置と、従って、支持プラットホーム110の垂直位置とが、主として、ねじ駆動装置140と戻しばね145とによって最大限度の上方位置と下方位置との間に制限されている。ねじ駆動装置140は、対応するねじ山付きインサートアセンブリに係合するファインレゾリューションねじ(fine resolution screw)100を含む。このねじ山付きインサートアセンブリは、ファインレゾリューションねじ山付き基部(fine resolution threaded base)(170)を備える。一方、この基部170は、中央に配置されているねじ山付き穴180とフランジ185とを有する本体部分175によって構成されている。この本体部分175はブラケット135の肩部195内の穴190の底部を貫通して延びる。本体部分175と穴190の両方は、本体部分175が穴190内に位置している時に、その本体部分175の回転を防止するための平らな部分200を含む。基部170を穴190内に固定するために、ナット205が本体部分175の外側表面のねじ山に係合する。ファインレゾリューションねじ100は基部170を貫通して延びて、連結肩部120の第1の側部に係合する。
【0015】
戻しばね145は、ブラケット135のU字形の延長部分から形成されている。このU字形の延長部分は丸く湾曲しており、かつ、拡幅された支持物セクション220において終端する、ブラケット135の底部のリップ(lip)215から延びる材料の狭幅ストリップ210を含む。支持物セクション220は、調整ねじ100とは反対側に位置した連結肩部120の第2の側部に係合する。
【0016】
動作時には、戻しばね145は、ねじ駆動装置140の方向において連結肩部120の底部に対する偏倚力を与えるように圧縮されている。垂直軸線75に沿った肩部120の位置が、主として、ファインレゾリューションねじ100が基部170を貫通して延びて肩部120の上部部分に接触する度合いを調整することによって調節される。
【0017】
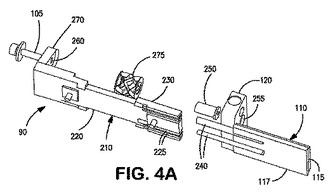
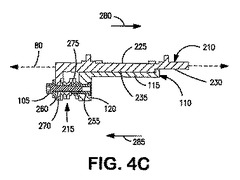
図4Aから図4Eは、水平調整アセンブリ90と、垂直調整アセンブリ85の支持プラットホーム110に対するその水平調整アセンブリ90の対応関係との一実施形態を示す。一般的に述べると、この水平調整アセンブリ90は、センサ支持プラットホーム210とねじ駆動装置215とから構成されている。このセンサ支持プラットホーム210は、センサ65に連結するようになっている前面220を含む。センサ65によって使用される信号/電力ワイヤを保持するために、案内溝225が面220内に設けられてもよい。個々のセンサ設計のサポートのために前面220を適合化させるために、様々な他の構造がその前面220上に設けられてもよい。
【0018】
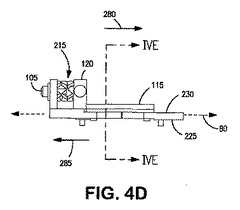
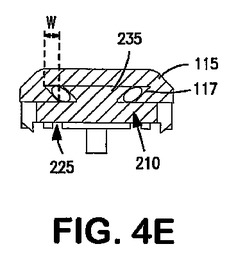
図4Dと図4Eとに示されているように、センサ支持プラットホーム210の後部表面230は、取り付け基部115の前面において溝117に係合するダブテール形の延長部分235を含む。この延長部分235と溝117は一体になって、水平軸線80に沿って取り付け基部115に対してセンサ支持プラットホーム210が相対的に移動することを可能にする概ねT字形の溝連結部を形成する。テフロン(登録商標)管軸受240が、ダブテール形延長部分235の内側の隅と溝117の内側表面との間に配置されている。管軸受240は、必然的に円筒形である横断面を有する。しかし、管軸受240の寸法が、延長部分235が溝117と係合する時に、この軸受が、円筒形の横断面形状から、図4Eに示されている概ね正方形の横断面形状に変形するように選択されることが好ましい。このために、各々の管軸受240の外径は、溝117のダブテール形部分の寸法Wのサイズの約1.15倍である。軸受構成が取り付け基部115と共に所定位置にセンサ支持プラットホーム210を固着させるのに十分な量の摩擦を実現すると同時に、水平軸線80に沿ったセンサ支持プラットホーム210の移動を可能にする限りは、他の材料と直径とが使用されてもよい。軸受240は、様々な公差に製造されたT形溝連結部の使用を容易にする補償器として機能することを含む、幾つかの機能を果たす。
【0019】
水平調整アセンブリ90のねじ駆動装置215の一実施形態が、特に図4Aと図4Cと図4Dに示されている。図示されているように、ねじ駆動装置215は、支持プラットホーム110の連結肩部120内の穴255を通って延びるねじ山付きインサート250を含む。ファインレゾリューション調整ねじ105は、センサ支持プラットホーム210の肩部270内の穴260の中を通って延びて、ねじ山付きインサート250と係合する。戻しばね275が、肩部120と肩部270とを互いに引き離すための、水平軸線80に沿った張力を与える。
【0020】
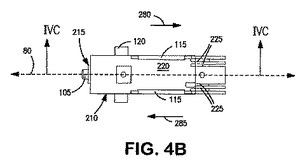
動作時には、支持プラットホーム210の水平位置(および、したがって、センサ60の水平位置)が、所望の位置が得られ終わるまで調整ねじ105を回転させることによって設定される。調整ねじ105がねじ山付きインサート250の中に送り込まれるようにその調整ねじ105が回転させられる時には、肩部270は戻しばね275の偏倚に逆らって肩部120に向かって動かされる。したがって、図4Bと図4Dと図4Eとに示されているように、センサ支持プラットホーム210は支持プラットホーム110に対して相対的に矢印280の方向に動かされる。調整ねじ105がねじ山付きインサート250から次第に外されるようにその調整ねじ105が回転させられる時には、肩部270は、戻しばね275によって発生された力によって肩部120から遠ざかるように動かされる。したがって、図4Bと図4Dと図4Eとに示されているように、センサ支持プラットホーム210は支持プラットホーム110に対して矢印285の方向に相対的に動かされる。
【0021】
最適の検出位置へのセンサ65の配置が、センサ65の出力を監視すると同時に上述の調整機構を動作させることによって実現されることが可能である。例えば、オシロスコープのような信号検出器が、粒子の流れが粒子チャンバ60の中を通過する最中にセンサ65からの出力信号を検出するために接続されてもよい。粒子チャンバ60の中を通過して流れる各々の粒子または粒子群が、そのオシロスコープ上で視覚的に監視されることが可能なセンサ65からの対応する出力信号を発生させる。このオシロスコープの水平掃引周波数が、粒子が粒子チャンバ65の中を通過する周波数と概ね同一または数倍に設定されることが可能である。この同期化が、オシロスコープの水平軸線に沿った規則正しい間隔でのパルスのピークまたは最小の発生を結果的に生じさせる。その次に、センサ65からの出力信号(すなわち、パルスのピークまたはパルスの最小)がその最大の大きさに達し、これによって検出軸線55に対するセンサ65の最適な相対的な位置決めを示すまで、垂直調整アセンブリ85と水平調整アセンブリ90とが動作させられる。センサ65の最適位置の決定のための他の手段が同様に適している。
【0022】
上述のシステムの基本的な開示内容から逸脱することなしに、様々な変更が上述のシステムに加えられることが可能である。本発明を1つまたは複数の特定の実施形態に関連してかなり詳細に説明してきたが、当業者は、添付されている特許請求項に説明されている本発明の範囲と着想とから逸脱することなしに、本発明に変更が加えられてよいということを理解するだろう。
【図面の簡単な説明】
【0023】
【図1】図1は、従来技術の開示内容にしたがって構成されているフローサイトメータの略図である。
【図2A】図2Aは、本発明の開示内容にしたがって構成されているフローサイトメータの一実施形態の略図である。
【図2B】図2Bは、本発明の開示内容にしたがって構成されているフローサイトメータの一実施形態の略図である。
【図2C】図2Cは、本発明の開示内容にしたがって構成されているフローサイトメータの一実施形態の略図である。
【図3A】図3Aは、図2Aに示されているフローサイトメータにおけるセンサの垂直位置の調整に使用するのに適している垂直調整アセンブリの一実施形態の略図である。
【図3B】図3Bは、図2Bに示されているフローサイトメータにおけるセンサの垂直位置の調整に使用するのに適している垂直調整アセンブリの一実施形態の略図である。
【図3C】図3Cは、図2Cに示されているフローサイトメータにおけるセンサの垂直位置の調整に使用するのに適している垂直調整アセンブリの一実施形態の略図である。
【図4A】図4Aは、図2Aに示されているフローサイトメータにおけるセンサの水平位置の調整に使用するのに適している水平調整アセンブリの一実施形態の略図である。
【図4B】図4Bは、図2Bに示されているフローサイトメータにおけるセンサの水平位置の調整に使用するのに適している水平調整アセンブリの一実施形態の略図である。
【図4C】図4Cは、図2Cに示されているフローサイトメータにおけるセンサの水平位置の調整に使用するのに適している水平調整アセンブリの一実施形態の略図である。
【技術分野】
【0001】
本発明は、一般的に、分析システムでの使用のためのセンサ位置合わせ装置に関する。さらに特に、フローサイトメータ内の電磁ビーム検出経路に沿って光検出器を支持および位置決めするセンサ位置合わせ装置が説明される。
【背景技術】
【0002】
生物細胞のような粒子の集団の1つまたは複数の特徴を測定するように設計されている装置が、実験室環境内において極めて一般的になっている。この装置は、様々な異なる分析方法を使用して様々な粒子タイプを分析するために使用可能である。例えば、特定の細胞特徴に関係するデータが、処理された生物細胞の集団の直接的な観察によって獲得されるだろう。この方法は、血液学的異常および疾病を診断するために使用されることが多い。間接的な仕方で生物学的および/または化学的データを獲得する別のタイプの分析システムが、人工粒子の集団を使用する。一般的に述べると、この前もって作られた粒子は球の形状である。この球は、反応性の表面被覆を有する非反応性のコアを含む。この表面被覆は、対象である分析物の化学成分と公知の仕方で反応してその球の蛍光発光のような特徴を変化させるように選択されている。この球は分析物に送り込まれ、および、その結果として生じる反応(または反応の失敗)が分析システムによって検出される。
【0003】
Rodriguez他に対する米国特許第5,125,737号が、粒子の流れが電磁放射エネルギーの点集束ビームの中に入れられて通過させられるフローサイトメータを説明している。この第5,125,737号特許は、本明細書に引例として組み入れられている。この装置の1つの実施態様が図1に示されている。この装置は、フローセル10を形成する細長い円筒形の部材を備える。このフローセル10は、例えば石英ガラス、石英、または、サファイアのような任意の光透過性材料で形成されることが可能である。このフローセル10の内側部分が、集束した流れ14として生物細胞サンプルが中を通過させられる狭窄穴すなわちネックダウン(necked−down)穴12を除いて、その長さ全体にわたって円筒形である。このフローセル10の外壁15は円筒形であり、かつ、光学定盤16を含む。レンズシステム18が、好ましくはレーザ22からの、電磁エネルギーのビーム20を穴12において点状に集束させる。散乱放射レセプタとして働く光検出器アセンブリ24が、レーザ放射電磁エネルギーのコミッション軸線(commission axis)26に対して直交しておりかつこの軸線を中心としている平面の中に配置されている。
【0004】
この光検出器アセンブリ24は、マスク28とビームダンプ30(不要なレーザ光を除去するための障害物)とを備える電磁センサによって構成されている。このマスク28は、異なる構成のフローセル10から同等の光散乱情報を得るために必要とされている通りの円形、楕円形、または、他の形状であることが可能である。このマスクは、レーザ光ビーム20と同中心に方向配置されている。ビームダンプ30は、図示されているレーザビームに面する光検出器アセンブリ24を水平方向に横断して延びる。このビームダンプ30は、より明瞭な信号対雑音出力を提供するために、中心からわずかに角度的に扇形に広げられることが可能である。
【0005】
動作時には、レーザ22によって放射される電磁放射がレンズシステム18の中を通過し、このレンズシステム18から、フローセル10の中を通過する粒子流の中を通過する。この電磁放射は粒子流14の粒子によって複数のビーム32の形に散乱させられる。様々な散乱角におけるビーム32の大きさが光検出器アセンブリ24によって検出される。一方、光検出器アセンブリ24は、そのビーム32の大きさに対応する電子信号を、後続の処理と変換とデータ分析とのための後続の電子回路に供給する。
【0006】
この装置の他の要素に対する光検出器アセンブリ24の相対的な位置が、上述のシステムの総合的な精度の重要な側面であることが現時点ですでに発見されている。現在まで、光検出器アセンブリ24の正確な位置決めは、極度に厳密な公差に製作される固定されたセンサ支持フレームを使用して実現されてきた。こうした厳密な製作交差は高コストあり、かつ、時として実現が困難である。したがって、この固定されたセンサ支持物という手法の代わりとなる代替物が望ましい。
【発明の開示】
【発明が解決しようとする課題】
【0007】
粒子の集団を分析する装置を説明する。
【課題を解決するための手段】
【0008】
この装置は、例えばレーザから、電磁放射ビームを発生させるようになっている放射源と、電磁放射ビームの経路内に配置されている粒子チャンバとを含む。この装置は、さらに、粒子チャンバによって散乱させられた電磁放射、または、他の形で粒子チャンバから受け取られた電磁放射を検出するためのセンサも含む。センサ位置合わせユニットが検出軸線に沿ってセンサを支持し、および、検出軸線に対して概ね垂直である平面内に位置している直交軸線に沿ったセンサの位置の調整を可能にする。一実施態様では、このセンサ位置合わせユニットは、第1の支持プラットホームと、第1の直交軸線に沿った第1の支持プラットホームの位置を調整するために配置されている第1の調整機構とを含む。このセンサ位置合わせユニットは、さらに、センサを支持する第2の支持プラットホームも含む。この第2の支持プラットホームは、この第2の支持プラットホームが第2の直交軸線に沿って移動することを可能にするように、第1の支持プラットホームに連結されている。第2の調整機構は、第2の直交軸線に沿った第1の支持プラットホームに対する第2の支持プラットホームの相対的な位置を調整するために備えられている。このようにして、センサの位置が、所望の粒子特徴の検出を最適化するために調整されることが可能である。
【発明を実施するための最良の形態】
【0009】
図2Aから図2Cは、40で全体的に示されている、粒子集団を分析するための装置の一実施形態を示す。この装置40の幾つかの構成要素が、上述したRodriguez他に対する米国特許第5,125,737号に示されている装置に見い出せる対応する構成要素に類似している。この目的のために、装置40は、電磁放射源45と集束システム50とを含む。この電磁放射源45と集束システム50は、放射軸線55に沿って電磁放射ビームを方向付けるようになっている。粒子チャンバ60が、集束システム50とセンサ65との間に放射軸線55に沿って配置されている。粒子チャンバ60の中を通過して流れる粒子が、放射軸線55に沿って供給される電磁放射に影響を与える。センサ65は、電磁スペクトル中の1つまたは複数の波長の電磁放射を検出するようになっている。これらの波長は、例えば、放射源45によって発生させられた電磁放射の波長に直接的に合致してもよく、または、この代わりに、分析される粒子が粒子チャンバ60を通過して流れる時にこの粒子によって発生させられる蛍光放射の波長に合致してもよい。センサ65によって受け取られる電磁放射は、検出軸線に沿って粒子チャンバ60から供給される。図示している実施形態では、この検出軸線と放射軸線55は互いに同一である。
【0010】
装置フレームとの絶対的な固定された関係において(および、したがって、検出軸線55との絶対的な固定された関係において)センサ65を支持する従来の装置とは違って、装置40のセンサ65は、センサ位置合わせユニット70に固定されている。このセンサ位置合わせユニット70は、検出軸線55に対して概ね垂直である平面内に位置している直交軸線75、80に沿ったセンサ65の位置の調整を可能にするようになっている。
【0011】
図示されている実施形態では、センサ位置合わせユニット70は、垂直調整アセンブリ85と水平調整アセンブリ90とを含む。垂直調整アセンブリ85は固定フレーム部材95によって支持されており、および、センサ65の位置が垂直軸線75に沿って調整されることを可能にする調整ねじ100を備えている。水平調整アセンブリ90は、垂直調整アセンブリ85によって支持されており、および、センサ65の位置が水平軸線80に沿って調整されることを可能にする別の調整ねじ105を備えている。
【0012】
垂直調整アセンブリ85を形成する特定の要素が図3Aから図3Cに示されている。概略的に述べると、図示されている実施形態の垂直調整アセンブリ85は支持プラットホーム110と調整機構113とを含む。この支持プラットホーム110は、水平調整アセンブリ90が取り付けられる溝117を有する取り付け基部115を含む。連結肩部120が基部115の末端から直角に延びる。1つまたは複数の穴125が連結肩部120を貫通している。各々の穴125は対応する皿穴130を含む。
【0013】
調整機構113は、そのブラケットの第1の末端に配置されているねじ駆動装置140と、そのブラケットの第2の末端に配置されている戻しばね145とを有する、ブラケット135を含む。1対のセキュアメント(securement)150が穴125の中を貫通して延びて、ブラケット135をフレーム部材95に取り付ける。穴125とセキュアメント150は、穴125に沿った連結肩部120の垂直移動を可能にし、実際上は、穴125が支持プラットホーム110の垂直移動のための案内溝として機能することを可能にするような大きさにされている。
【0014】
軸線75に沿った、連結肩部120の垂直位置と、従って、支持プラットホーム110の垂直位置とが、主として、ねじ駆動装置140と戻しばね145とによって最大限度の上方位置と下方位置との間に制限されている。ねじ駆動装置140は、対応するねじ山付きインサートアセンブリに係合するファインレゾリューションねじ(fine resolution screw)100を含む。このねじ山付きインサートアセンブリは、ファインレゾリューションねじ山付き基部(fine resolution threaded base)(170)を備える。一方、この基部170は、中央に配置されているねじ山付き穴180とフランジ185とを有する本体部分175によって構成されている。この本体部分175はブラケット135の肩部195内の穴190の底部を貫通して延びる。本体部分175と穴190の両方は、本体部分175が穴190内に位置している時に、その本体部分175の回転を防止するための平らな部分200を含む。基部170を穴190内に固定するために、ナット205が本体部分175の外側表面のねじ山に係合する。ファインレゾリューションねじ100は基部170を貫通して延びて、連結肩部120の第1の側部に係合する。
【0015】
戻しばね145は、ブラケット135のU字形の延長部分から形成されている。このU字形の延長部分は丸く湾曲しており、かつ、拡幅された支持物セクション220において終端する、ブラケット135の底部のリップ(lip)215から延びる材料の狭幅ストリップ210を含む。支持物セクション220は、調整ねじ100とは反対側に位置した連結肩部120の第2の側部に係合する。
【0016】
動作時には、戻しばね145は、ねじ駆動装置140の方向において連結肩部120の底部に対する偏倚力を与えるように圧縮されている。垂直軸線75に沿った肩部120の位置が、主として、ファインレゾリューションねじ100が基部170を貫通して延びて肩部120の上部部分に接触する度合いを調整することによって調節される。
【0017】
図4Aから図4Eは、水平調整アセンブリ90と、垂直調整アセンブリ85の支持プラットホーム110に対するその水平調整アセンブリ90の対応関係との一実施形態を示す。一般的に述べると、この水平調整アセンブリ90は、センサ支持プラットホーム210とねじ駆動装置215とから構成されている。このセンサ支持プラットホーム210は、センサ65に連結するようになっている前面220を含む。センサ65によって使用される信号/電力ワイヤを保持するために、案内溝225が面220内に設けられてもよい。個々のセンサ設計のサポートのために前面220を適合化させるために、様々な他の構造がその前面220上に設けられてもよい。
【0018】
図4Dと図4Eとに示されているように、センサ支持プラットホーム210の後部表面230は、取り付け基部115の前面において溝117に係合するダブテール形の延長部分235を含む。この延長部分235と溝117は一体になって、水平軸線80に沿って取り付け基部115に対してセンサ支持プラットホーム210が相対的に移動することを可能にする概ねT字形の溝連結部を形成する。テフロン(登録商標)管軸受240が、ダブテール形延長部分235の内側の隅と溝117の内側表面との間に配置されている。管軸受240は、必然的に円筒形である横断面を有する。しかし、管軸受240の寸法が、延長部分235が溝117と係合する時に、この軸受が、円筒形の横断面形状から、図4Eに示されている概ね正方形の横断面形状に変形するように選択されることが好ましい。このために、各々の管軸受240の外径は、溝117のダブテール形部分の寸法Wのサイズの約1.15倍である。軸受構成が取り付け基部115と共に所定位置にセンサ支持プラットホーム210を固着させるのに十分な量の摩擦を実現すると同時に、水平軸線80に沿ったセンサ支持プラットホーム210の移動を可能にする限りは、他の材料と直径とが使用されてもよい。軸受240は、様々な公差に製造されたT形溝連結部の使用を容易にする補償器として機能することを含む、幾つかの機能を果たす。
【0019】
水平調整アセンブリ90のねじ駆動装置215の一実施形態が、特に図4Aと図4Cと図4Dに示されている。図示されているように、ねじ駆動装置215は、支持プラットホーム110の連結肩部120内の穴255を通って延びるねじ山付きインサート250を含む。ファインレゾリューション調整ねじ105は、センサ支持プラットホーム210の肩部270内の穴260の中を通って延びて、ねじ山付きインサート250と係合する。戻しばね275が、肩部120と肩部270とを互いに引き離すための、水平軸線80に沿った張力を与える。
【0020】
動作時には、支持プラットホーム210の水平位置(および、したがって、センサ60の水平位置)が、所望の位置が得られ終わるまで調整ねじ105を回転させることによって設定される。調整ねじ105がねじ山付きインサート250の中に送り込まれるようにその調整ねじ105が回転させられる時には、肩部270は戻しばね275の偏倚に逆らって肩部120に向かって動かされる。したがって、図4Bと図4Dと図4Eとに示されているように、センサ支持プラットホーム210は支持プラットホーム110に対して相対的に矢印280の方向に動かされる。調整ねじ105がねじ山付きインサート250から次第に外されるようにその調整ねじ105が回転させられる時には、肩部270は、戻しばね275によって発生された力によって肩部120から遠ざかるように動かされる。したがって、図4Bと図4Dと図4Eとに示されているように、センサ支持プラットホーム210は支持プラットホーム110に対して矢印285の方向に相対的に動かされる。
【0021】
最適の検出位置へのセンサ65の配置が、センサ65の出力を監視すると同時に上述の調整機構を動作させることによって実現されることが可能である。例えば、オシロスコープのような信号検出器が、粒子の流れが粒子チャンバ60の中を通過する最中にセンサ65からの出力信号を検出するために接続されてもよい。粒子チャンバ60の中を通過して流れる各々の粒子または粒子群が、そのオシロスコープ上で視覚的に監視されることが可能なセンサ65からの対応する出力信号を発生させる。このオシロスコープの水平掃引周波数が、粒子が粒子チャンバ65の中を通過する周波数と概ね同一または数倍に設定されることが可能である。この同期化が、オシロスコープの水平軸線に沿った規則正しい間隔でのパルスのピークまたは最小の発生を結果的に生じさせる。その次に、センサ65からの出力信号(すなわち、パルスのピークまたはパルスの最小)がその最大の大きさに達し、これによって検出軸線55に対するセンサ65の最適な相対的な位置決めを示すまで、垂直調整アセンブリ85と水平調整アセンブリ90とが動作させられる。センサ65の最適位置の決定のための他の手段が同様に適している。
【0022】
上述のシステムの基本的な開示内容から逸脱することなしに、様々な変更が上述のシステムに加えられることが可能である。本発明を1つまたは複数の特定の実施形態に関連してかなり詳細に説明してきたが、当業者は、添付されている特許請求項に説明されている本発明の範囲と着想とから逸脱することなしに、本発明に変更が加えられてよいということを理解するだろう。
【図面の簡単な説明】
【0023】
【図1】図1は、従来技術の開示内容にしたがって構成されているフローサイトメータの略図である。
【図2A】図2Aは、本発明の開示内容にしたがって構成されているフローサイトメータの一実施形態の略図である。
【図2B】図2Bは、本発明の開示内容にしたがって構成されているフローサイトメータの一実施形態の略図である。
【図2C】図2Cは、本発明の開示内容にしたがって構成されているフローサイトメータの一実施形態の略図である。
【図3A】図3Aは、図2Aに示されているフローサイトメータにおけるセンサの垂直位置の調整に使用するのに適している垂直調整アセンブリの一実施形態の略図である。
【図3B】図3Bは、図2Bに示されているフローサイトメータにおけるセンサの垂直位置の調整に使用するのに適している垂直調整アセンブリの一実施形態の略図である。
【図3C】図3Cは、図2Cに示されているフローサイトメータにおけるセンサの垂直位置の調整に使用するのに適している垂直調整アセンブリの一実施形態の略図である。
【図4A】図4Aは、図2Aに示されているフローサイトメータにおけるセンサの水平位置の調整に使用するのに適している水平調整アセンブリの一実施形態の略図である。
【図4B】図4Bは、図2Bに示されているフローサイトメータにおけるセンサの水平位置の調整に使用するのに適している水平調整アセンブリの一実施形態の略図である。
【図4C】図4Cは、図2Cに示されているフローサイトメータにおけるセンサの水平位置の調整に使用するのに適している水平調整アセンブリの一実施形態の略図である。
【特許請求の範囲】
【請求項1】
粒子の集団を分析する装置であって、
電磁放射ビームを発生させるようになっている放射源と、
前記電磁放射ビームの経路内に配置されている粒子チャンバと、
電磁放射を検出するようになっているセンサと、
検出軸線に沿って前記センサを支持するセンサ位置合わせユニットであって、前記検出軸線に対して概ね垂直である平面内に位置している少なくとも2つの直交軸線に沿った前記センサの位置の調整を可能にするようになっているセンサ位置合わせユニットと、
を備える装置。
【請求項2】
前記センサ位置合わせユニットは、
第1の支持プラットホームと、
前記直交軸線の第1の軸線に沿って前記第1の支持プラットホームの位置を調整するために配置されている第1の調整機構と、
前記第1の支持プラットホームに連結されており、かつ、前記センサを支持する第2の支持プラットホームと、
前記直交軸線の第2の軸線に沿った前記第1の支持プラットホームに対する前記第2の支持プラットホームの相対的な位置を調整するために配置されている第2の調整機構と、
を備える請求項1に記載の装置。
【請求項3】
前記第1の支持プラットホームは、
支持基部と、
前記支持基部から延びる連結肩部であって、この連結肩部の中を通して配置されている少なくとも1つの案内溝を有する連結肩部と、
を備える請求項2に記載の装置。
【請求項4】
前記第1の調整機構は、
フレームと、
前記フレームと固定的に整合しているブラケットと、
前記少なくとも1つの案内溝の中を通して前記ブラケットを前記連結肩部と連結するセキュアメントであって、前記案内溝に沿った前記連結肩部の移動を可能にするような大きさにされているセキュアメントと、
前記ブラケットの第1の末端に配置されており、かつ、前記連結肩部の第1の末端に係合するねじ駆動装置と、
前記ブラケットの第2の末端に配置されており、かつ、前記連結肩部の第2の末端に係合する戻しばねであって、前記ねじ駆動装置とこの戻しばねは、前記直交軸線の前記第1の軸線に沿った前記第1の支持プラットホームの調整を容易にするために協働する戻しばねと、
を備える請求項3に記載の装置。
【請求項5】
前記第1の支持プラットホームは第1の支持基部を備える請求項2に記載の装置。
【請求項6】
前記第2の支持プラットホームは第2の支持基部を備え、前記第1および第2の支持基部は、前記直交軸線の前記第2の軸線に沿って前記第1および第2の支持基部が互いに対して相対的に移動することを可能にするT形溝連結部内で互いに係合する請求項5に記載の装置。
【請求項7】
前記第2の調整機構は、
前記第1の支持プラットホームと概ね固定的に整合している第1の末端と、第2の末端と、前記第2の支持プラットホームとの概ね固定的な整合とを有するねじ駆動装置と、
前記ねじ駆動装置による前記第1および第2の支持プラットホームの間の相対的移動に抵抗する偏倚部材と、
を備える請求項6に記載の装置。
【請求項8】
前記T形溝連結部はダブテール形である請求項6に記載の装置。
【請求項9】
前記ダブテール形のT形溝連結部の隅に配置されている1つまたは複数の圧縮性軸受をさらに備える請求項8に記載の装置。
【請求項10】
前記1つまたは複数の圧縮性軸受は中空の管を備える請求項9に記載の装置。
【請求項11】
前記中空の管は、前記ダブテール形のT形溝連結部の中で概ね正方形の横断面に変形する請求項10に記載の装置。
【請求項12】
前記第2の支持プラットホームは第2の支持基部を備え、前記第1および第2の支持基部は、前記直交軸線の前記第2の軸線に沿って前記第1および第2の支持基部が互いに対して相対的に移動することを可能にするT形溝連結部内で互いに係合する請求項4に記載の装置。
【請求項13】
前記第2の調整機構は、
前記第1の支持プラットホームと概ね固定的に整合している第1の末端と、第2の末端と、前記第2の支持プラットホームとの概ね固定的な整合とを有するねじ駆動装置と、
前記ねじ駆動装置による前記第1および第2の支持プラットホームの間の相対的移動に抵抗する偏倚部材と、
を備える請求項12に記載の装置。
【請求項14】
前記T形溝連結部はダブテール形である請求項13に記載の装置。
【請求項15】
前記ダブテール形のT形溝連結部の隅に配置されている1つまたは複数の圧縮性軸受をさらに備える請求項14に記載の装置。
【請求項16】
前記1つまたは複数の圧縮性軸受は中空の管を備える請求項15に記載の装置。
【請求項17】
前記中空の管は、前記ダブテール形のT形溝連結部の中で概ね正方形の横断面に変形する請求項16に記載の装置。
【請求項18】
前記粒子チャンバはフローサイトメータのフローセルである請求項1に記載の装置。
【請求項19】
前記センサは光センサである請求項1に記載の装置。
【請求項20】
検出軸線に対して垂直な平面内のセンサの位置を調整する装置であって、
前記センサを支持するようになっている第1の支持プラットホームと、
第1の軸線に沿って前記第1の支持プラットホームの位置を調整するために配置されている第1の調整機構と、
前記第1の支持プラットホームにスライド自在に連結されておりかつ前記センサを支持する第2の支持プラットホームと、
第2の軸線に沿った前記第1の支持プラットホームに対する前記第2の支持プラットホームの相対的な位置を調整するために配置されている第2の調整機構であって、前記第1および第2の軸線は概ね互いに直交しており、かつ、前記検出軸線に対して概ね垂直である平面内に位置している第2の調整機構と、
を備える装置。
【請求項21】
前記第1の支持プラットホームは、
支持基部と、
前記支持基部から延びる連結肩部であって、この連結肩部の中を通して配置されている少なくとも1つの案内溝を有する連結肩部と、
を備える請求項20に記載の装置。
【請求項22】
前記第1の調整機構は、
フレームと、
前記フレームと固定的に整合しているブラケットと、
前記少なくとも1つの案内溝の中を通して前記ブラケットを前記連結肩部と連結するセキュアメントであって、前記案内溝に沿った前記連結肩部の移動を可能にするような大きさにされているセキュアメントと、
前記ブラケットの第1の末端に配置されており、かつ、前記連結肩部の第1の末端に係合するねじ駆動装置と、
前記ブラケットの第2の末端に配置されており、かつ、前記連結肩部の第2の末端に係合する戻しばねであって、前記ねじ駆動装置とこの戻しばねは、前記直交軸線の前記第1の軸線に沿った前記第1の支持プラットホームの調整を容易にするために協働する戻しばねと、
を備える請求項21に記載の装置。
【請求項23】
前記第1の支持プラットホームは第1の支持基部を備える請求項20に記載の装置。
【請求項24】
前記第2の支持プラットホームは第2の支持基部を備え、前記第1および第2の支持基部は、前記直交軸線の前記第2の軸線に沿って前記第1および第2の支持基部が互いに対して相対的に移動することを可能にするT形溝連結部内で互いに係合する請求項23に記載の装置。
【請求項25】
前記第2の調整機構は、
前記第1の支持プラットホームと概ね固定的に整合している第1の末端と、第2の末端と、前記第2の支持プラットホームとの概ね固定的な整合とを有するねじ駆動装置と、
前記ねじ駆動装置による前記第1および第2の支持プラットホームの間の相対的移動に抵抗する偏倚部材と、
を備える請求項24に記載の装置。
【請求項26】
前記T形溝連結部はダブテール形である請求項24に記載の装置。
【請求項27】
前記ダブテール形のT形溝連結部の隅に配置されている1つまたは複数の圧縮性軸受をさらに備える請求項26に記載の装置。
【請求項28】
前記1つまたは複数の圧縮性軸受は中空の管を備える請求項27に記載の装置。
【請求項29】
前記中空の管は、前記ダブテール形のT形溝連結部の中で概ね正方形の横断面に変形する請求項27に記載の装置。
【請求項30】
前記第2の支持プラットホームは第2の支持基部を備え、前記第1および第2の支持基部は、前記直交軸線の前記第2の軸線に沿って前記第1および第2の支持基部が互いに対して相対的に移動することを可能にするT形溝連結部内で互いに係合する請求項22に記載の装置。
【請求項31】
前記第2の調整機構は、
前記第1の支持プラットホームと概ね固定的に整合している第1の末端と、第2の末端と、前記第2の支持プラットホームとの概ね固定的な整合とを有するねじ駆動装置と、
前記ねじ駆動装置による前記第1および第2の支持プラットホームの間の相対的移動に抵抗する偏倚部材と、
を備える請求項30に記載の装置。
【請求項32】
前記T形溝連結部はダブテール形である請求項31に記載の装置。
【請求項33】
前記ダブテール形のT形溝連結部の隅に配置されている1つまたは複数の圧縮性軸受をさらに備える請求項32に記載の装置。
【請求項34】
前記1つまたは複数の圧縮性軸受は中空の管を備える請求項33に記載の装置。
【請求項35】
前記中空の管は、前記ダブテール形のT形溝連結部の中で概ね正方形の横断面に変形する請求項34に記載の装置。
【請求項36】
フローサイトメータであって、
電磁放射ビームを放射するようになっている放射源と、
検出軸線に沿って移動する、電磁放射を検出するようになっているセンサと、
前記放射源と前記センサとの間に配置されているフローセルと、
前記検出軸線に沿って移動する電磁放射を検出する前記センサを支持するセンサ位置合わせユニットであって、前記検出軸線に対して概ね垂直である平面内に位置する直交軸線に沿って前記センサの位置を調整することを可能にするようになっているセンサ位置合わせユニットと、
を備えるフローサイトメータ。
【請求項37】
前記センサ位置合わせユニットは、
第1の支持プラットホームと、
前記直交軸線の第1の軸線に沿って前記第1の支持プラットホームの位置を調整するために配置されている第1の調整機構と、
前記第1の支持プラットホームに連結されており、かつ、前記センサを支持する第2の支持プラットホームと、
前記直交軸線の第2の軸線に沿った前記第1の支持プラットホームに対する前記第2の支持プラットホームの相対的な位置を調整するために配置されている第2の調整機構と、
を備える請求項36に記載の装置。
【請求項38】
前記第1の支持プラットホームは、
支持基部と、
前記支持基部から延びる連結肩部であって、この連結肩部の中を通して配置されている少なくとも1つの案内溝を有する連結肩部と、
を備える請求項37に記載の装置。
【請求項39】
前記第1の調整機構は、
フレームと、
前記フレームと固定的に整合しているブラケットと、
前記少なくとも1つの案内溝の中を通して前記ブラケットを前記連結肩部と連結するセキュアメントであって、前記案内溝に沿った前記連結肩部の移動を可能にするような大きさにされているセキュアメントと、
前記ブラケットの第1の末端に配置されており、かつ、前記連結肩部の第1の末端に係合するねじ駆動装置と、
前記ブラケットの第2の末端に配置されており、かつ、前記連結肩部の第2の末端に係合する戻しばねであって、前記ねじ駆動装置とこの戻しばねは、前記直交軸線の前記第1の軸線に沿った前記第1の支持プラットホームの調整を容易にするために協働する戻しばねと、
を備える請求項38に記載の装置。
【請求項40】
前記第1の支持プラットホームは第1の支持基部を備える請求項37に記載の装置。
【請求項41】
前記第2の支持プラットホームは第2の支持基部を備え、前記第1および第2の支持基部は、前記直交軸線の前記第2の軸線に沿って前記第1および第2の支持基部が互いに対して相対的に移動することを可能にするT形溝連結部内で互いに係合する請求項40に記載の装置。
【請求項42】
前記第2の調整機構は、
前記第1の支持プラットホームと概ね固定的に整合している第1の末端と、前記第2の支持プラットホームと概ね固定的に整合している第2の末端とを有するねじ駆動装置と、
前記ねじ駆動装置による前記第1および第2の支持プラットホームの間の相対的移動に抵抗する偏倚部材と、
を備える請求項41に記載の装置。
【請求項43】
電磁放射ビームの経路内に配置されている粒子チャンバに向けて前記電磁放射ビームを発生するようになっている放射源と、検出軸線に沿って電磁放射を検出するようになっているセンサとを有するフローサイトメータにおいて、前記検出軸線に対する前記センサの相対的な位置を最適化する方法であって、
前記センサの出力に対応する電子信号を監視する段階と、
前記電子信号が1つまたは複数の予め決められた基準に合致するまで、前記検出軸線に対して垂直な平面内に位置する少なくとも2つの直交軸線に沿って前記センサの位置を調整する段階と、
を含む方法。
【請求項44】
前記監視段階は、オシロスコープを使用して前記電子信号を視覚的に監視することを含む請求項43に記載の方法。
【請求項45】
前記調整段階は、
第1の調整機構を使用して、前記少なくとも2つの直交軸線の第1の直交軸線に沿った前記センサの位置を調整する段階と、
第2の調整機構を使用して、前記少なくとも2つの直交軸線の第2の直交軸線に沿った前記センサの位置を調整する段階と、
を含む請求項43に記載の方法。
【請求項46】
前記調整段階は、前記電子信号の大きさが最大化されるまで、位置している前記少なくとも2つの直交軸線に沿った前記センサの位置を調整することを含む請求項44に記載の方法。
【請求項47】
前記調整段階は、前記電子信号のピークパルスの大きさが最大化されるまで、前記少なくとも2つの直交軸線に沿った前記センサの位置を調整することを含む請求項44に記載の方法。
【請求項48】
前記調整段階は、前記電子信号のピークヌル(peak null)の大きさが最大化されるまで、前記少なくとも2つの直交軸線に沿った前記センサの位置を調整することを含む請求項44に記載の方法。
【請求項1】
粒子の集団を分析する装置であって、
電磁放射ビームを発生させるようになっている放射源と、
前記電磁放射ビームの経路内に配置されている粒子チャンバと、
電磁放射を検出するようになっているセンサと、
検出軸線に沿って前記センサを支持するセンサ位置合わせユニットであって、前記検出軸線に対して概ね垂直である平面内に位置している少なくとも2つの直交軸線に沿った前記センサの位置の調整を可能にするようになっているセンサ位置合わせユニットと、
を備える装置。
【請求項2】
前記センサ位置合わせユニットは、
第1の支持プラットホームと、
前記直交軸線の第1の軸線に沿って前記第1の支持プラットホームの位置を調整するために配置されている第1の調整機構と、
前記第1の支持プラットホームに連結されており、かつ、前記センサを支持する第2の支持プラットホームと、
前記直交軸線の第2の軸線に沿った前記第1の支持プラットホームに対する前記第2の支持プラットホームの相対的な位置を調整するために配置されている第2の調整機構と、
を備える請求項1に記載の装置。
【請求項3】
前記第1の支持プラットホームは、
支持基部と、
前記支持基部から延びる連結肩部であって、この連結肩部の中を通して配置されている少なくとも1つの案内溝を有する連結肩部と、
を備える請求項2に記載の装置。
【請求項4】
前記第1の調整機構は、
フレームと、
前記フレームと固定的に整合しているブラケットと、
前記少なくとも1つの案内溝の中を通して前記ブラケットを前記連結肩部と連結するセキュアメントであって、前記案内溝に沿った前記連結肩部の移動を可能にするような大きさにされているセキュアメントと、
前記ブラケットの第1の末端に配置されており、かつ、前記連結肩部の第1の末端に係合するねじ駆動装置と、
前記ブラケットの第2の末端に配置されており、かつ、前記連結肩部の第2の末端に係合する戻しばねであって、前記ねじ駆動装置とこの戻しばねは、前記直交軸線の前記第1の軸線に沿った前記第1の支持プラットホームの調整を容易にするために協働する戻しばねと、
を備える請求項3に記載の装置。
【請求項5】
前記第1の支持プラットホームは第1の支持基部を備える請求項2に記載の装置。
【請求項6】
前記第2の支持プラットホームは第2の支持基部を備え、前記第1および第2の支持基部は、前記直交軸線の前記第2の軸線に沿って前記第1および第2の支持基部が互いに対して相対的に移動することを可能にするT形溝連結部内で互いに係合する請求項5に記載の装置。
【請求項7】
前記第2の調整機構は、
前記第1の支持プラットホームと概ね固定的に整合している第1の末端と、第2の末端と、前記第2の支持プラットホームとの概ね固定的な整合とを有するねじ駆動装置と、
前記ねじ駆動装置による前記第1および第2の支持プラットホームの間の相対的移動に抵抗する偏倚部材と、
を備える請求項6に記載の装置。
【請求項8】
前記T形溝連結部はダブテール形である請求項6に記載の装置。
【請求項9】
前記ダブテール形のT形溝連結部の隅に配置されている1つまたは複数の圧縮性軸受をさらに備える請求項8に記載の装置。
【請求項10】
前記1つまたは複数の圧縮性軸受は中空の管を備える請求項9に記載の装置。
【請求項11】
前記中空の管は、前記ダブテール形のT形溝連結部の中で概ね正方形の横断面に変形する請求項10に記載の装置。
【請求項12】
前記第2の支持プラットホームは第2の支持基部を備え、前記第1および第2の支持基部は、前記直交軸線の前記第2の軸線に沿って前記第1および第2の支持基部が互いに対して相対的に移動することを可能にするT形溝連結部内で互いに係合する請求項4に記載の装置。
【請求項13】
前記第2の調整機構は、
前記第1の支持プラットホームと概ね固定的に整合している第1の末端と、第2の末端と、前記第2の支持プラットホームとの概ね固定的な整合とを有するねじ駆動装置と、
前記ねじ駆動装置による前記第1および第2の支持プラットホームの間の相対的移動に抵抗する偏倚部材と、
を備える請求項12に記載の装置。
【請求項14】
前記T形溝連結部はダブテール形である請求項13に記載の装置。
【請求項15】
前記ダブテール形のT形溝連結部の隅に配置されている1つまたは複数の圧縮性軸受をさらに備える請求項14に記載の装置。
【請求項16】
前記1つまたは複数の圧縮性軸受は中空の管を備える請求項15に記載の装置。
【請求項17】
前記中空の管は、前記ダブテール形のT形溝連結部の中で概ね正方形の横断面に変形する請求項16に記載の装置。
【請求項18】
前記粒子チャンバはフローサイトメータのフローセルである請求項1に記載の装置。
【請求項19】
前記センサは光センサである請求項1に記載の装置。
【請求項20】
検出軸線に対して垂直な平面内のセンサの位置を調整する装置であって、
前記センサを支持するようになっている第1の支持プラットホームと、
第1の軸線に沿って前記第1の支持プラットホームの位置を調整するために配置されている第1の調整機構と、
前記第1の支持プラットホームにスライド自在に連結されておりかつ前記センサを支持する第2の支持プラットホームと、
第2の軸線に沿った前記第1の支持プラットホームに対する前記第2の支持プラットホームの相対的な位置を調整するために配置されている第2の調整機構であって、前記第1および第2の軸線は概ね互いに直交しており、かつ、前記検出軸線に対して概ね垂直である平面内に位置している第2の調整機構と、
を備える装置。
【請求項21】
前記第1の支持プラットホームは、
支持基部と、
前記支持基部から延びる連結肩部であって、この連結肩部の中を通して配置されている少なくとも1つの案内溝を有する連結肩部と、
を備える請求項20に記載の装置。
【請求項22】
前記第1の調整機構は、
フレームと、
前記フレームと固定的に整合しているブラケットと、
前記少なくとも1つの案内溝の中を通して前記ブラケットを前記連結肩部と連結するセキュアメントであって、前記案内溝に沿った前記連結肩部の移動を可能にするような大きさにされているセキュアメントと、
前記ブラケットの第1の末端に配置されており、かつ、前記連結肩部の第1の末端に係合するねじ駆動装置と、
前記ブラケットの第2の末端に配置されており、かつ、前記連結肩部の第2の末端に係合する戻しばねであって、前記ねじ駆動装置とこの戻しばねは、前記直交軸線の前記第1の軸線に沿った前記第1の支持プラットホームの調整を容易にするために協働する戻しばねと、
を備える請求項21に記載の装置。
【請求項23】
前記第1の支持プラットホームは第1の支持基部を備える請求項20に記載の装置。
【請求項24】
前記第2の支持プラットホームは第2の支持基部を備え、前記第1および第2の支持基部は、前記直交軸線の前記第2の軸線に沿って前記第1および第2の支持基部が互いに対して相対的に移動することを可能にするT形溝連結部内で互いに係合する請求項23に記載の装置。
【請求項25】
前記第2の調整機構は、
前記第1の支持プラットホームと概ね固定的に整合している第1の末端と、第2の末端と、前記第2の支持プラットホームとの概ね固定的な整合とを有するねじ駆動装置と、
前記ねじ駆動装置による前記第1および第2の支持プラットホームの間の相対的移動に抵抗する偏倚部材と、
を備える請求項24に記載の装置。
【請求項26】
前記T形溝連結部はダブテール形である請求項24に記載の装置。
【請求項27】
前記ダブテール形のT形溝連結部の隅に配置されている1つまたは複数の圧縮性軸受をさらに備える請求項26に記載の装置。
【請求項28】
前記1つまたは複数の圧縮性軸受は中空の管を備える請求項27に記載の装置。
【請求項29】
前記中空の管は、前記ダブテール形のT形溝連結部の中で概ね正方形の横断面に変形する請求項27に記載の装置。
【請求項30】
前記第2の支持プラットホームは第2の支持基部を備え、前記第1および第2の支持基部は、前記直交軸線の前記第2の軸線に沿って前記第1および第2の支持基部が互いに対して相対的に移動することを可能にするT形溝連結部内で互いに係合する請求項22に記載の装置。
【請求項31】
前記第2の調整機構は、
前記第1の支持プラットホームと概ね固定的に整合している第1の末端と、第2の末端と、前記第2の支持プラットホームとの概ね固定的な整合とを有するねじ駆動装置と、
前記ねじ駆動装置による前記第1および第2の支持プラットホームの間の相対的移動に抵抗する偏倚部材と、
を備える請求項30に記載の装置。
【請求項32】
前記T形溝連結部はダブテール形である請求項31に記載の装置。
【請求項33】
前記ダブテール形のT形溝連結部の隅に配置されている1つまたは複数の圧縮性軸受をさらに備える請求項32に記載の装置。
【請求項34】
前記1つまたは複数の圧縮性軸受は中空の管を備える請求項33に記載の装置。
【請求項35】
前記中空の管は、前記ダブテール形のT形溝連結部の中で概ね正方形の横断面に変形する請求項34に記載の装置。
【請求項36】
フローサイトメータであって、
電磁放射ビームを放射するようになっている放射源と、
検出軸線に沿って移動する、電磁放射を検出するようになっているセンサと、
前記放射源と前記センサとの間に配置されているフローセルと、
前記検出軸線に沿って移動する電磁放射を検出する前記センサを支持するセンサ位置合わせユニットであって、前記検出軸線に対して概ね垂直である平面内に位置する直交軸線に沿って前記センサの位置を調整することを可能にするようになっているセンサ位置合わせユニットと、
を備えるフローサイトメータ。
【請求項37】
前記センサ位置合わせユニットは、
第1の支持プラットホームと、
前記直交軸線の第1の軸線に沿って前記第1の支持プラットホームの位置を調整するために配置されている第1の調整機構と、
前記第1の支持プラットホームに連結されており、かつ、前記センサを支持する第2の支持プラットホームと、
前記直交軸線の第2の軸線に沿った前記第1の支持プラットホームに対する前記第2の支持プラットホームの相対的な位置を調整するために配置されている第2の調整機構と、
を備える請求項36に記載の装置。
【請求項38】
前記第1の支持プラットホームは、
支持基部と、
前記支持基部から延びる連結肩部であって、この連結肩部の中を通して配置されている少なくとも1つの案内溝を有する連結肩部と、
を備える請求項37に記載の装置。
【請求項39】
前記第1の調整機構は、
フレームと、
前記フレームと固定的に整合しているブラケットと、
前記少なくとも1つの案内溝の中を通して前記ブラケットを前記連結肩部と連結するセキュアメントであって、前記案内溝に沿った前記連結肩部の移動を可能にするような大きさにされているセキュアメントと、
前記ブラケットの第1の末端に配置されており、かつ、前記連結肩部の第1の末端に係合するねじ駆動装置と、
前記ブラケットの第2の末端に配置されており、かつ、前記連結肩部の第2の末端に係合する戻しばねであって、前記ねじ駆動装置とこの戻しばねは、前記直交軸線の前記第1の軸線に沿った前記第1の支持プラットホームの調整を容易にするために協働する戻しばねと、
を備える請求項38に記載の装置。
【請求項40】
前記第1の支持プラットホームは第1の支持基部を備える請求項37に記載の装置。
【請求項41】
前記第2の支持プラットホームは第2の支持基部を備え、前記第1および第2の支持基部は、前記直交軸線の前記第2の軸線に沿って前記第1および第2の支持基部が互いに対して相対的に移動することを可能にするT形溝連結部内で互いに係合する請求項40に記載の装置。
【請求項42】
前記第2の調整機構は、
前記第1の支持プラットホームと概ね固定的に整合している第1の末端と、前記第2の支持プラットホームと概ね固定的に整合している第2の末端とを有するねじ駆動装置と、
前記ねじ駆動装置による前記第1および第2の支持プラットホームの間の相対的移動に抵抗する偏倚部材と、
を備える請求項41に記載の装置。
【請求項43】
電磁放射ビームの経路内に配置されている粒子チャンバに向けて前記電磁放射ビームを発生するようになっている放射源と、検出軸線に沿って電磁放射を検出するようになっているセンサとを有するフローサイトメータにおいて、前記検出軸線に対する前記センサの相対的な位置を最適化する方法であって、
前記センサの出力に対応する電子信号を監視する段階と、
前記電子信号が1つまたは複数の予め決められた基準に合致するまで、前記検出軸線に対して垂直な平面内に位置する少なくとも2つの直交軸線に沿って前記センサの位置を調整する段階と、
を含む方法。
【請求項44】
前記監視段階は、オシロスコープを使用して前記電子信号を視覚的に監視することを含む請求項43に記載の方法。
【請求項45】
前記調整段階は、
第1の調整機構を使用して、前記少なくとも2つの直交軸線の第1の直交軸線に沿った前記センサの位置を調整する段階と、
第2の調整機構を使用して、前記少なくとも2つの直交軸線の第2の直交軸線に沿った前記センサの位置を調整する段階と、
を含む請求項43に記載の方法。
【請求項46】
前記調整段階は、前記電子信号の大きさが最大化されるまで、位置している前記少なくとも2つの直交軸線に沿った前記センサの位置を調整することを含む請求項44に記載の方法。
【請求項47】
前記調整段階は、前記電子信号のピークパルスの大きさが最大化されるまで、前記少なくとも2つの直交軸線に沿った前記センサの位置を調整することを含む請求項44に記載の方法。
【請求項48】
前記調整段階は、前記電子信号のピークヌル(peak null)の大きさが最大化されるまで、前記少なくとも2つの直交軸線に沿った前記センサの位置を調整することを含む請求項44に記載の方法。
【図1】



【図2A】

【図2B】
【図2C】

【図3A】
【図3B】

【図3C】

【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【図2A】
【図2B】
【図2C】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【公表番号】特表2008−510994(P2008−510994A)
【公表日】平成20年4月10日(2008.4.10)
【国際特許分類】
【出願番号】特願2007−529915(P2007−529915)
【出願日】平成17年8月12日(2005.8.12)
【国際出願番号】PCT/US2005/028562
【国際公開番号】WO2006/023364
【国際公開日】平成18年3月2日(2006.3.2)
【出願人】(505275295)ベックマン コールター,インコーポレイティド (25)
【公表日】平成20年4月10日(2008.4.10)
【国際特許分類】
【出願日】平成17年8月12日(2005.8.12)
【国際出願番号】PCT/US2005/028562
【国際公開番号】WO2006/023364
【国際公開日】平成18年3月2日(2006.3.2)
【出願人】(505275295)ベックマン コールター,インコーポレイティド (25)
[ Back to top ]