
布類の展開方法
【課題】洗濯され脱水されて固められたシーツ等の大面積の布類を、ロール仕上げ機に投入するために自動的に平らに伸ばすことができる布類の展開方法を提供する。
【解決手段】3軸のロボットアームからなる第1アーム1及び第2アーム4と、2軸のロボットアームからなる第3アーム6と、1個の位置センサと、予め入力された展開する布類の縦横の幅径データと及びセンサの出力を用いて3個のロボットアームを制御する制御部とを備える装置を用いて、吊り下げた布類3の下端となる角端を3つのロボットアームで受け渡しながら、布類の隣接する角端を見つけ出して展開することができる。
【解決手段】3軸のロボットアームからなる第1アーム1及び第2アーム4と、2軸のロボットアームからなる第3アーム6と、1個の位置センサと、予め入力された展開する布類の縦横の幅径データと及びセンサの出力を用いて3個のロボットアームを制御する制御部とを備える装置を用いて、吊り下げた布類3の下端となる角端を3つのロボットアームで受け渡しながら、布類の隣接する角端を見つけ出して展開することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、連続洗濯仕上設備において、連続洗濯機により洗濯され、脱水機により脱水されて固められたシーツ等の大面積の布類を、仕上乾燥と皺伸ばしを行うロール仕上げ機に投入するために自動的に平らに伸ばして展開することができる展開方法に関するものである。
【背景技術】
【0002】
従来、連続洗濯仕上設備において、洗濯機から脱水機と、ロール仕上げ機の工程については自動化されて、人手を要することなく効率良く作業されているものの、洗濯・脱水された被洗物を、プレス仕上げするロール仕上げ機に投入する方法としては、手作業でおこわなれている。
すなわち、脱水作業により固められてクシャクシャになったシーツ等の布類を展開して、その一辺をロール仕上げ機に引き渡すためには、布類を拡げながらその端辺をたどって隣接する2つの角端を見つけ出して展張する必要があるが、その作業を自動化する装置は存在せず、布類の両側に配置された作業者が手作業で布類の両端を見つけ出し把持して展張して、ロール仕上げ機に投入せざるを得なかった。その作業を軽減するために、2個のクランプで布類の一辺の両端を保持して展開させる方法が案出されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−89473号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した方法も作業者の人手に依存するものであって、高温度、高湿度条件下での作業をロボット化することができれば、作業改善に大きく貢献することができると期待されている。
本発明は、このような実情に鑑みてなされたものであり、固まりとなっている状態の布類をロール仕上げ機に投入するために、布類の隣接する角端を自動的に見つけ出し把持して展開することができる布類の展開方法を提供しようとするものである。
【課題を解決するための手段】
【0005】
上記解決課題に鑑みて鋭意研究の結果、本発明者は、3本のロボットアームを用いて布類を受け渡しながら布類の隣接する角端を自動的に見つけ出し把持して展開することができる布類の展開方法を案出するに至った。
【0006】
すなわち、本発明の布類の展開方法は、固定された基端部から延出して先端に上下左右に移動自在な布類把持部を備える第1アーム及び第2アームと、該第1アーム及び第2アームを通る垂直面から離れて基端部を固定し該基端部から延出して先端に上下左右に移動する布類把持部を備える第3アームと、前記第1アーム及び第2アームの布類把持部が把持して持ち上げた布類の下端が予め設定された位置となったことを検出するセンサと、展開する布類の幅径データが入力され前記センサの布類の位置検出機能を用いて前記第1アーム、第2アーム及び第3アームの動作を制御する制御手段とを備える装置を用いて布類を展開する方法であって、前記第1アームの布類把持部と前記第2アームの布類把持部とは展開する布類の対角線の幅径以上の間隔を設けて位置すべく設定され、かつ前記第1アームの布類把持部と前記第3アームの布類把持部とは展開する布類の幅径以上の間隔を設けて位置すべく設定され、第1アームの布類把持部は布類の何れかの部分を把持して持ち上げることにより該布類の何れかの角端となる下端を前記センサが位置検出する設定位置に位置させ、第2アームの布類把持部は前記設定位置に移動して当該個所に位置する布類の下端である第1角端を把持し、第1アームの布類把持部は把持する布類を離し、第2アームは把持する布類を持ち上げることにより前記第1角端の対角の第2角端となる布類の下端を前記センサが位置検出する設定位置に位置させ、第1アームの布類把持部は前記設定位置に移動して当該個所に位置する前記布類の第2角端を把持し、第1アームはその布類把持部が第2アームの布類把持部と同じ高さになるように把持する布類を持ち上げ、第1アームと第2アームは把持する布類を互いに反対方向に牽引付勢して布類を展張しながらその下端を前記センサが位置検出する設定位置に位置させ、第3アームの布類把持部は前記設定位置に移動して当該個所に位置する前記布類の第1角端及び第2角端と隣設する第3角端を把持し、第2アームの布類把持部は布類を離し、第1アームと第3アームは把持する布類を互いに反対方向に牽引付勢して布類の一辺を展張状態で把持して移動させることを特徴とするものである。
これにより、本発明の布類の展開方法によれば、固まりとなっている状態の布類の隣接する角端を自動的に見つけ出し把持して展開してロール仕上げ機に投入することにより、大きく作業改善することができるものである。
【0007】
また、センサは第1アーム若しくは第2アームの布類把持部が把持する布類を所定高さに持ち上げてから、この持ち上げられた布類の下端が所定高さに位置するまで下降させて前記布類の高さを検出することを特徴とする。
これにより、センサは布類の下端を確実に位置検出することができる。
【0008】
また、第1アーム及び/又は第2アームの布類把持部が布類の下端を把持する際に、布類の上端位置で開放状態の布類把持部の間に布類を位置させたまま、布類に添って下方向に移動させて布類の下端で把持することを特徴とする。
これにより、計算して得られた座標からずれた位置に布類の下端が位置していた場合であっても、布類把持部は空振りすることなく、確実に布類の角端を把持することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の布類の展開方法を示す説明図である。
【図2】本発明の布類の展開方法を示す説明図である。
【図3】本発明の布類の展開方法を示す説明図である。
【図4】本発明の布類の展開方法を示す説明図である。
【図5】本発明の布類の展開方法を示す説明図である。
【図6】本発明の布類の展開方法を示す説明図である。
【図7】本発明の布類の展開方法を示す説明図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら、本発明の布類の展開方法を実施するための形態を詳細に説明する。図1〜図7は、本発明の実施の形態を例示する図であり、これらの図において、同一の符号を付した部分は同一物を表わし、基本的な構成及び動作は同様であるものとする。
【0011】
図1〜図7は、本発明の布類の展開方法を手順を追って説明するものであり、連続洗濯機で洗濯された後、脱水機で脱水されて固められた状態、若しくは多少ほぐされた状態のシーツ等の大面積の布類を、自動的に展開するものである。対象とする布類は、矩形のシーツに限られることなく、袋形状や、小面積のものであってもよいものである。
本発明の布類の展開方法に用いる展開装置としては、3個所に関節を備えてより動作が滑らかな3軸アームからなる2個のロボットアームと、2個所に関節を備える2軸アームからなる1個のロボットアームと、1個の位置センサ(図示せず)と、予め入力された展開する布類の縦横の幅径データと及び前記センサの出力を用いて3個のロボットアームを動作制御すべくプログラムされた制御部(図示せず)とを備え、図の仮想線で示す空間内に配置して使用するものである。この展開装置が布類を受け取る前工程の連続洗濯機や脱水機、そして後工程の展開した布類を投入するロール仕上機については図面では省略している。
【0012】
以下に、図1から図7まで順に、1個のセンサを用いて3個のロボットアームが布類を受け渡し(持ち替え)ながら角端を見つけ出して展開する手順を説明する。
<図1>
制御部には、展開しようとする布類の幅径データが入力され、そしてそのデータに基づいてロボットアームを駆動する所定のプログラムが入力されている。
作業空間内の上方に固定された基端部から垂下する3軸アームからなる第1アーム1は、先端の布類把持部2が所定の台に載置されたシーツ等の布類3を把持しやすいようにその近傍に位置している。
この第1アーム1からほぼY軸方向に離れてほぼ同じ高さに位置する第2アーム4は、その先端の布類把持部5が、第1アーム1の布類把持部2と布類3の対角線の幅径以上の間隔を設けて位置することができるように位置設定されている。
また、上述した第1アーム1と第2アーム4を含む垂直面と離れた位置で、かつ第1アーム1と第2アーム4よりも低い位置に第3アーム6が配設されている。この第3アーム6は、その布類把持部7が、第1アーム1の布類把持部2と布類3の展開する幅径以上の間隔を設けて位置することができるように位置設定されている。
【0013】
このような構成からなる装置において、前記制御部は所定のプログラムの手順に基づいて、まず3軸アームからなる第1アーム1の先端に備えた開閉自在の布類把持部2に、所定の台に載置されたシーツ等の布類3の何れかの部分を把持させて、予め設定された座標位置に持ち上げる。
そして、この座標位置の鉛直線(Z軸)下方には、その位置のX−Y座標面における布類の有無を検知するためのセンサが位置している。
【0014】
<図2>
布類3を把持した第1アーム1は、布類把持部2先端を図1のX−Y座標位置からZ軸下方向に移動させながら、センサはその検知する位置に布類3の下端が来るのを待つ。この布類3の下端は、四隅の内の何れかであることが推定される。
センサが布類3の下端が所定位置に来たことを検知すると、制御部は第1アーム1を停止させ、続いて2軸アームからなる第2アーム4の布類把持部5を、第1アーム1の布類把持部2が把持している個所の布類3の位置に移動させて、その開放状態の布類把持部5の間に布類3を位置させたまま、Z軸下方向に移動させる。この動作は、懸下された布類3の下端が、布類把持部2が把持する上端の直下から多少ずれて位置した場合であっても、確実に布類の下端を見つけ出すために行う手順である。もちろん、複数のセンサを用意して、布類の下端の絶対座標を特定することができる場合には、この動作を省略することがでる。
そして、制御部はセンサが検知した布類3の下端の高さにおいて、第2アーム4の布類把持部5を閉じ、布類3の下端、すなわち布類3の四隅の内の何れかを把持するものであり、この個所を第1角端3aとする。
【0015】
<図3>
次に第1アーム1の布類把持部2は、把持する布類3を離して、第2アーム4に受け渡す。この状態において、第2アーム4の布類把持部5が布類3の四隅の一つである第1角端3aを上端として布類3を吊り下げ、その場合に最下端は、第1角端3aから最も遠い位置にある対角の角端(これを第2角端3bとする)となる。
【0016】
<図4>
第2アーム4は、布類把持部5が把持する布類3をそのX−Y座標位置からZ軸上方向に、前記センサの検知位置よりも上に持ち上げる。そこから、布類3を徐々に下降させていき、センサが検知する位置に布類3の下端が来ると第2アーム4はそこで停止する。
【0017】
<図5>
第1アーム1の布類把持部2は、第2アーム4の布類把持部5が把持している布類3の第1角端3a近傍に移動して、その開放状態の布類把持部2の間に布類3を位置させたまま、Z軸下方向に移動する。
そして、制御部はセンサが検知した布類3の下端において、第2アーム4の布類把持部5を閉じ、布類3の下端、すなわち布類3の第2角端3bを把持する。
【0018】
<図6>
第1アーム1と第2アーム4は、ともに把持する布類3を互いに反対方向に牽引付勢して展張させ、その状態で、双方が把持する第1角端3aと第2角端3bが同じ高さになるように持ち上げる。この状態で、布類3の下方には2つの下端が位置をずらして(布類が長方形の場合)位置する。
第1アーム1と第2アーム4は、把持した布類3をZ軸下方向に移動させ、布類3の何れかの下端がセンサが検知する高さになったところで停止する。この布類3の下方の2つの下端のどちらかを選択するのかによって、最終的に布類を横長に展開するか、縦長に展開するかが決定される。
第3アーム6は、その先端の布類把持部7を、センサが検知した位置の布類3の下端、すなわち布類3の四隅の内の、第1角端3a及び第2角端3bと隣接する第3角端3cを把持する。
【0019】
<図7>
第2アーム4の布類把持部5は把持している布類3を離し、これにより第1アーム1の布類把持部2と第3アーム6の布類把持部7とで、布類3の第2角端3bと第3角端3cを含む一辺を展張して把持して、そこから下方向に布類3を吊り下げることができる。
そして、このようにして展張した布類3は、容易にロール仕上げ機に投入することができる。
【産業上の利用可能性】
【0020】
本発明の布類の展開方法は、連続洗濯仕上設備を使用する産業及びそれを製造する産業において利用することができるものである。
【符号の説明】
【0021】
1 第1アーム
2 布類把持部
3 布類
3a 第1角端
3b 第2角端
3c 第3角端
4 第2アーム
5 布類把持部
6 第3アーム
7 布類把持部
【技術分野】
【0001】
本発明は、連続洗濯仕上設備において、連続洗濯機により洗濯され、脱水機により脱水されて固められたシーツ等の大面積の布類を、仕上乾燥と皺伸ばしを行うロール仕上げ機に投入するために自動的に平らに伸ばして展開することができる展開方法に関するものである。
【背景技術】
【0002】
従来、連続洗濯仕上設備において、洗濯機から脱水機と、ロール仕上げ機の工程については自動化されて、人手を要することなく効率良く作業されているものの、洗濯・脱水された被洗物を、プレス仕上げするロール仕上げ機に投入する方法としては、手作業でおこわなれている。
すなわち、脱水作業により固められてクシャクシャになったシーツ等の布類を展開して、その一辺をロール仕上げ機に引き渡すためには、布類を拡げながらその端辺をたどって隣接する2つの角端を見つけ出して展張する必要があるが、その作業を自動化する装置は存在せず、布類の両側に配置された作業者が手作業で布類の両端を見つけ出し把持して展張して、ロール仕上げ機に投入せざるを得なかった。その作業を軽減するために、2個のクランプで布類の一辺の両端を保持して展開させる方法が案出されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−89473号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した方法も作業者の人手に依存するものであって、高温度、高湿度条件下での作業をロボット化することができれば、作業改善に大きく貢献することができると期待されている。
本発明は、このような実情に鑑みてなされたものであり、固まりとなっている状態の布類をロール仕上げ機に投入するために、布類の隣接する角端を自動的に見つけ出し把持して展開することができる布類の展開方法を提供しようとするものである。
【課題を解決するための手段】
【0005】
上記解決課題に鑑みて鋭意研究の結果、本発明者は、3本のロボットアームを用いて布類を受け渡しながら布類の隣接する角端を自動的に見つけ出し把持して展開することができる布類の展開方法を案出するに至った。
【0006】
すなわち、本発明の布類の展開方法は、固定された基端部から延出して先端に上下左右に移動自在な布類把持部を備える第1アーム及び第2アームと、該第1アーム及び第2アームを通る垂直面から離れて基端部を固定し該基端部から延出して先端に上下左右に移動する布類把持部を備える第3アームと、前記第1アーム及び第2アームの布類把持部が把持して持ち上げた布類の下端が予め設定された位置となったことを検出するセンサと、展開する布類の幅径データが入力され前記センサの布類の位置検出機能を用いて前記第1アーム、第2アーム及び第3アームの動作を制御する制御手段とを備える装置を用いて布類を展開する方法であって、前記第1アームの布類把持部と前記第2アームの布類把持部とは展開する布類の対角線の幅径以上の間隔を設けて位置すべく設定され、かつ前記第1アームの布類把持部と前記第3アームの布類把持部とは展開する布類の幅径以上の間隔を設けて位置すべく設定され、第1アームの布類把持部は布類の何れかの部分を把持して持ち上げることにより該布類の何れかの角端となる下端を前記センサが位置検出する設定位置に位置させ、第2アームの布類把持部は前記設定位置に移動して当該個所に位置する布類の下端である第1角端を把持し、第1アームの布類把持部は把持する布類を離し、第2アームは把持する布類を持ち上げることにより前記第1角端の対角の第2角端となる布類の下端を前記センサが位置検出する設定位置に位置させ、第1アームの布類把持部は前記設定位置に移動して当該個所に位置する前記布類の第2角端を把持し、第1アームはその布類把持部が第2アームの布類把持部と同じ高さになるように把持する布類を持ち上げ、第1アームと第2アームは把持する布類を互いに反対方向に牽引付勢して布類を展張しながらその下端を前記センサが位置検出する設定位置に位置させ、第3アームの布類把持部は前記設定位置に移動して当該個所に位置する前記布類の第1角端及び第2角端と隣設する第3角端を把持し、第2アームの布類把持部は布類を離し、第1アームと第3アームは把持する布類を互いに反対方向に牽引付勢して布類の一辺を展張状態で把持して移動させることを特徴とするものである。
これにより、本発明の布類の展開方法によれば、固まりとなっている状態の布類の隣接する角端を自動的に見つけ出し把持して展開してロール仕上げ機に投入することにより、大きく作業改善することができるものである。
【0007】
また、センサは第1アーム若しくは第2アームの布類把持部が把持する布類を所定高さに持ち上げてから、この持ち上げられた布類の下端が所定高さに位置するまで下降させて前記布類の高さを検出することを特徴とする。
これにより、センサは布類の下端を確実に位置検出することができる。
【0008】
また、第1アーム及び/又は第2アームの布類把持部が布類の下端を把持する際に、布類の上端位置で開放状態の布類把持部の間に布類を位置させたまま、布類に添って下方向に移動させて布類の下端で把持することを特徴とする。
これにより、計算して得られた座標からずれた位置に布類の下端が位置していた場合であっても、布類把持部は空振りすることなく、確実に布類の角端を把持することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の布類の展開方法を示す説明図である。
【図2】本発明の布類の展開方法を示す説明図である。
【図3】本発明の布類の展開方法を示す説明図である。
【図4】本発明の布類の展開方法を示す説明図である。
【図5】本発明の布類の展開方法を示す説明図である。
【図6】本発明の布類の展開方法を示す説明図である。
【図7】本発明の布類の展開方法を示す説明図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら、本発明の布類の展開方法を実施するための形態を詳細に説明する。図1〜図7は、本発明の実施の形態を例示する図であり、これらの図において、同一の符号を付した部分は同一物を表わし、基本的な構成及び動作は同様であるものとする。
【0011】
図1〜図7は、本発明の布類の展開方法を手順を追って説明するものであり、連続洗濯機で洗濯された後、脱水機で脱水されて固められた状態、若しくは多少ほぐされた状態のシーツ等の大面積の布類を、自動的に展開するものである。対象とする布類は、矩形のシーツに限られることなく、袋形状や、小面積のものであってもよいものである。
本発明の布類の展開方法に用いる展開装置としては、3個所に関節を備えてより動作が滑らかな3軸アームからなる2個のロボットアームと、2個所に関節を備える2軸アームからなる1個のロボットアームと、1個の位置センサ(図示せず)と、予め入力された展開する布類の縦横の幅径データと及び前記センサの出力を用いて3個のロボットアームを動作制御すべくプログラムされた制御部(図示せず)とを備え、図の仮想線で示す空間内に配置して使用するものである。この展開装置が布類を受け取る前工程の連続洗濯機や脱水機、そして後工程の展開した布類を投入するロール仕上機については図面では省略している。
【0012】
以下に、図1から図7まで順に、1個のセンサを用いて3個のロボットアームが布類を受け渡し(持ち替え)ながら角端を見つけ出して展開する手順を説明する。
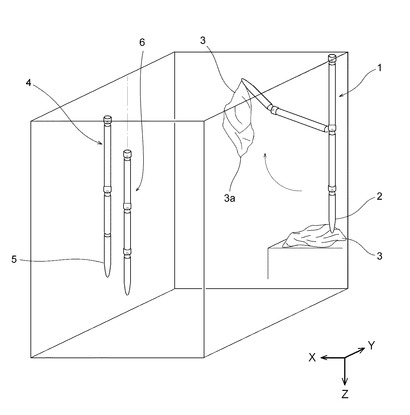
<図1>
制御部には、展開しようとする布類の幅径データが入力され、そしてそのデータに基づいてロボットアームを駆動する所定のプログラムが入力されている。
作業空間内の上方に固定された基端部から垂下する3軸アームからなる第1アーム1は、先端の布類把持部2が所定の台に載置されたシーツ等の布類3を把持しやすいようにその近傍に位置している。
この第1アーム1からほぼY軸方向に離れてほぼ同じ高さに位置する第2アーム4は、その先端の布類把持部5が、第1アーム1の布類把持部2と布類3の対角線の幅径以上の間隔を設けて位置することができるように位置設定されている。
また、上述した第1アーム1と第2アーム4を含む垂直面と離れた位置で、かつ第1アーム1と第2アーム4よりも低い位置に第3アーム6が配設されている。この第3アーム6は、その布類把持部7が、第1アーム1の布類把持部2と布類3の展開する幅径以上の間隔を設けて位置することができるように位置設定されている。
【0013】
このような構成からなる装置において、前記制御部は所定のプログラムの手順に基づいて、まず3軸アームからなる第1アーム1の先端に備えた開閉自在の布類把持部2に、所定の台に載置されたシーツ等の布類3の何れかの部分を把持させて、予め設定された座標位置に持ち上げる。
そして、この座標位置の鉛直線(Z軸)下方には、その位置のX−Y座標面における布類の有無を検知するためのセンサが位置している。
【0014】
<図2>
布類3を把持した第1アーム1は、布類把持部2先端を図1のX−Y座標位置からZ軸下方向に移動させながら、センサはその検知する位置に布類3の下端が来るのを待つ。この布類3の下端は、四隅の内の何れかであることが推定される。
センサが布類3の下端が所定位置に来たことを検知すると、制御部は第1アーム1を停止させ、続いて2軸アームからなる第2アーム4の布類把持部5を、第1アーム1の布類把持部2が把持している個所の布類3の位置に移動させて、その開放状態の布類把持部5の間に布類3を位置させたまま、Z軸下方向に移動させる。この動作は、懸下された布類3の下端が、布類把持部2が把持する上端の直下から多少ずれて位置した場合であっても、確実に布類の下端を見つけ出すために行う手順である。もちろん、複数のセンサを用意して、布類の下端の絶対座標を特定することができる場合には、この動作を省略することがでる。
そして、制御部はセンサが検知した布類3の下端の高さにおいて、第2アーム4の布類把持部5を閉じ、布類3の下端、すなわち布類3の四隅の内の何れかを把持するものであり、この個所を第1角端3aとする。
【0015】
<図3>
次に第1アーム1の布類把持部2は、把持する布類3を離して、第2アーム4に受け渡す。この状態において、第2アーム4の布類把持部5が布類3の四隅の一つである第1角端3aを上端として布類3を吊り下げ、その場合に最下端は、第1角端3aから最も遠い位置にある対角の角端(これを第2角端3bとする)となる。
【0016】
<図4>
第2アーム4は、布類把持部5が把持する布類3をそのX−Y座標位置からZ軸上方向に、前記センサの検知位置よりも上に持ち上げる。そこから、布類3を徐々に下降させていき、センサが検知する位置に布類3の下端が来ると第2アーム4はそこで停止する。
【0017】
<図5>
第1アーム1の布類把持部2は、第2アーム4の布類把持部5が把持している布類3の第1角端3a近傍に移動して、その開放状態の布類把持部2の間に布類3を位置させたまま、Z軸下方向に移動する。
そして、制御部はセンサが検知した布類3の下端において、第2アーム4の布類把持部5を閉じ、布類3の下端、すなわち布類3の第2角端3bを把持する。
【0018】
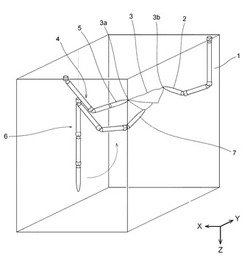
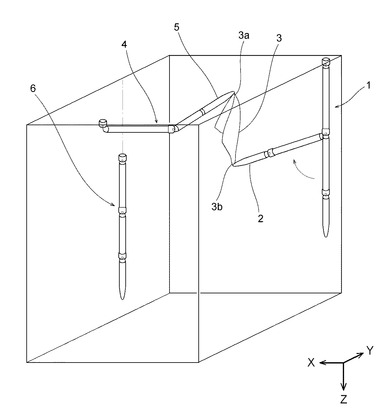
<図6>
第1アーム1と第2アーム4は、ともに把持する布類3を互いに反対方向に牽引付勢して展張させ、その状態で、双方が把持する第1角端3aと第2角端3bが同じ高さになるように持ち上げる。この状態で、布類3の下方には2つの下端が位置をずらして(布類が長方形の場合)位置する。
第1アーム1と第2アーム4は、把持した布類3をZ軸下方向に移動させ、布類3の何れかの下端がセンサが検知する高さになったところで停止する。この布類3の下方の2つの下端のどちらかを選択するのかによって、最終的に布類を横長に展開するか、縦長に展開するかが決定される。
第3アーム6は、その先端の布類把持部7を、センサが検知した位置の布類3の下端、すなわち布類3の四隅の内の、第1角端3a及び第2角端3bと隣接する第3角端3cを把持する。
【0019】
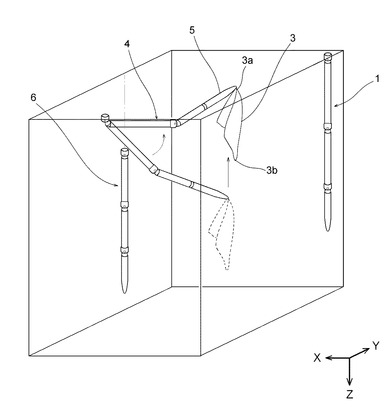
<図7>
第2アーム4の布類把持部5は把持している布類3を離し、これにより第1アーム1の布類把持部2と第3アーム6の布類把持部7とで、布類3の第2角端3bと第3角端3cを含む一辺を展張して把持して、そこから下方向に布類3を吊り下げることができる。
そして、このようにして展張した布類3は、容易にロール仕上げ機に投入することができる。
【産業上の利用可能性】
【0020】
本発明の布類の展開方法は、連続洗濯仕上設備を使用する産業及びそれを製造する産業において利用することができるものである。
【符号の説明】
【0021】
1 第1アーム
2 布類把持部
3 布類
3a 第1角端
3b 第2角端
3c 第3角端
4 第2アーム
5 布類把持部
6 第3アーム
7 布類把持部
【特許請求の範囲】
【請求項1】
固定された基端部から延出して先端に上下左右に移動自在な布類把持部を備える第1アーム及び第2アームと、
該第1アーム及び第2アームを通る垂直面から離れて基端部を固定し該基端部から延出して先端に上下左右に移動する布類把持部を備える第3アームと、
前記第1アーム及び第2アームの布類把持部が把持して持ち上げた布類の下端が予め設定された位置となったことを検出するセンサと、
展開する布類の幅径データが入力され前記センサの布類の位置検出機能を用いて前記第1アーム、第2アーム及び第3アームの動作を制御する制御手段とを備える装置を用いて布類を展開する方法であって、
前記第1アームの布類把持部と前記第2アームの布類把持部とは展開する布類の対角線の幅径以上の間隔を設けて位置すべく設定され、かつ前記第1アームの布類把持部と前記第3アームの布類把持部とは展開する布類の幅径以上の間隔を設けて位置すべく設定され、
第1アームの布類把持部は布類の何れかの部分を把持して持ち上げることにより該布類の何れかの角端となる下端を前記センサが位置検出する設定位置に位置させ、
第2アームの布類把持部は前記設定位置に移動して当該個所に位置する布類の下端である第1角端を把持し、
第1アームの布類把持部は把持する布類を離し、
第2アームは把持する布類を持ち上げることにより前記第1角端の対角の第2角端となる布類の下端を前記センサが位置検出する設定位置に位置させ、
第1アームの布類把持部は前記設定位置に移動して当該個所に位置する前記布類の第2角端を把持し、
第1アームはその布類把持部が第2アームの布類把持部と同じ高さになるように把持する布類を持ち上げ、
第1アームと第2アームは把持する布類を互いに反対方向に牽引付勢して布類を展張しながらその下端を前記センサが位置検出する設定位置に位置させ、
第3アームの布類把持部は前記設定位置に移動して当該個所に位置する前記布類の第1角端及び第2角端と隣設する第3角端を把持し、
第2アームの布類把持部は布類を離し、
第1アームと第3アームは把持する布類を互いに反対方向に牽引付勢して布類の一辺を展張状態で把持して移動させることを特徴とする布類の展開方法。
【請求項2】
センサは第1アーム若しくは第2アームの布類把持部が把持する布類を所定高さに持ち上げてから、この持ち上げられた布類の下端が所定高さに位置するまで下降させて前記布類の高さを検出することを特徴とする請求項1記載の布類の展開方法。
【請求項3】
第1アーム及び/又は第2アームの布類把持部が布類の下端を把持する際に、布類の上端位置で開放状態の布類把持部の間に布類を位置させたまま、布類に添って下方向に移動させて布類の下端で把持することを特徴とする請求項1又は2に記載の布類の展開方法。
【請求項1】
固定された基端部から延出して先端に上下左右に移動自在な布類把持部を備える第1アーム及び第2アームと、
該第1アーム及び第2アームを通る垂直面から離れて基端部を固定し該基端部から延出して先端に上下左右に移動する布類把持部を備える第3アームと、
前記第1アーム及び第2アームの布類把持部が把持して持ち上げた布類の下端が予め設定された位置となったことを検出するセンサと、
展開する布類の幅径データが入力され前記センサの布類の位置検出機能を用いて前記第1アーム、第2アーム及び第3アームの動作を制御する制御手段とを備える装置を用いて布類を展開する方法であって、
前記第1アームの布類把持部と前記第2アームの布類把持部とは展開する布類の対角線の幅径以上の間隔を設けて位置すべく設定され、かつ前記第1アームの布類把持部と前記第3アームの布類把持部とは展開する布類の幅径以上の間隔を設けて位置すべく設定され、
第1アームの布類把持部は布類の何れかの部分を把持して持ち上げることにより該布類の何れかの角端となる下端を前記センサが位置検出する設定位置に位置させ、
第2アームの布類把持部は前記設定位置に移動して当該個所に位置する布類の下端である第1角端を把持し、
第1アームの布類把持部は把持する布類を離し、
第2アームは把持する布類を持ち上げることにより前記第1角端の対角の第2角端となる布類の下端を前記センサが位置検出する設定位置に位置させ、
第1アームの布類把持部は前記設定位置に移動して当該個所に位置する前記布類の第2角端を把持し、
第1アームはその布類把持部が第2アームの布類把持部と同じ高さになるように把持する布類を持ち上げ、
第1アームと第2アームは把持する布類を互いに反対方向に牽引付勢して布類を展張しながらその下端を前記センサが位置検出する設定位置に位置させ、
第3アームの布類把持部は前記設定位置に移動して当該個所に位置する前記布類の第1角端及び第2角端と隣設する第3角端を把持し、
第2アームの布類把持部は布類を離し、
第1アームと第3アームは把持する布類を互いに反対方向に牽引付勢して布類の一辺を展張状態で把持して移動させることを特徴とする布類の展開方法。
【請求項2】
センサは第1アーム若しくは第2アームの布類把持部が把持する布類を所定高さに持ち上げてから、この持ち上げられた布類の下端が所定高さに位置するまで下降させて前記布類の高さを検出することを特徴とする請求項1記載の布類の展開方法。
【請求項3】
第1アーム及び/又は第2アームの布類把持部が布類の下端を把持する際に、布類の上端位置で開放状態の布類把持部の間に布類を位置させたまま、布類に添って下方向に移動させて布類の下端で把持することを特徴とする請求項1又は2に記載の布類の展開方法。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】

【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−210357(P2012−210357A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2011−77948(P2011−77948)
【出願日】平成23年3月31日(2011.3.31)
【出願人】(390027421)株式会社東京洗染機械製作所 (47)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成23年3月31日(2011.3.31)
【出願人】(390027421)株式会社東京洗染機械製作所 (47)
[ Back to top ]