
搬送装置及び搬送方法

【課題】旋回可能な一対のアーム部を車輪の前後に配置し、上記アーム部にて車輪を保持して搬送する搬送装置及び搬送方法において、アーム部の見かけ上の旋回領域を減少させることによって、種々の車両の搬送に対応可能とする。
【解決手段】後側アーム部31bを退避姿勢から当接可能姿勢に旋回する場合に、後側アーム部31bが当接可能姿勢とされる第1の位置Aよりも前側に設定された第2の位置Bにて退避姿勢とされた後側アーム部31bを、第2の位置Bから第1の位置Aに移動させながら旋回する。
【解決手段】後側アーム部31bを退避姿勢から当接可能姿勢に旋回する場合に、後側アーム部31bが当接可能姿勢とされる第1の位置Aよりも前側に設定された第2の位置Bにて退避姿勢とされた後側アーム部31bを、第2の位置Bから第1の位置Aに移動させながら旋回する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送装置及び搬送方法に関するものであり、特に前後方向に近接された2つの車輪を有する車両の搬送に適した搬送装置及び搬送方法に関するものである。
【背景技術】
【0002】
例えば、車両に積まれたコンテナの中身を外部からX線を照射することによって検査する場合には、車両に運転者が乗り込まない状態にて車両をX線装置まで搬送する必要があるため、車輪を保持して持ち上げた状態にて車両を搬送する搬送装置が用いられている。
【0003】
例えば、特許文献1及び2には、車両の車輪の前後に配置される一対のアーム部にて車輪を保持して持ち上げた状態にて搬送する搬送装置が提案されている。
このような搬送装置によれば、アーム部が旋回可能とされており、アーム部を旋回させることによって、基準位置に配置された車輪の前後にアーム部を配置するように構成されている。
【0004】
このような構成を有する搬送装置によれば、特許文献3に提案される搬送装置のように、地下ピットを形成することなく車両の搬送が可能となるため、搬送装置の設置コストが大幅に低減できる等のメリットがある。
【特許文献1】特開2007−331852号公報
【特許文献2】特開2007−331853号公報
【特許文献3】特許第4005828号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、上述のように車輪の前後にアーム部を配置するためには、アーム部を旋回させる必要があり、アーム部を旋回させるための領域を確保する必要がある。
しかしながら、コンテナを積載する車両は様々な種類を有しており、保持する車輪の前後にアーム部の旋回の障害となる障害物が存在する場合もある。このような障害物が存在する車両は、アーム部を車輪の前後に配置できないため、特許文献1及び2に提案された搬送装置にて搬送できない。
このため、種々の車両に対応可能とするためにも、アーム部の旋回領域をより小さくすることが望まれる。
【0006】
特にコンテナを積載する車両は大型のものがあるため、前輪が前後方向に近接された2つの車輪(前前輪、後前輪)から構成されている場合がある。このような2つの前輪を有する車両の前前輪を保持しようとした場合には、前後輪が上記障害物となりアーム部を車両の前後に配置することができない。
【0007】
本発明は、上述する問題点に鑑みてなされたもので、旋回可能な一対のアーム部を車輪の前後に配置し、上記アーム部にて車輪を保持して搬送する搬送装置及び搬送方法において、アーム部の見かけ上の旋回領域を減少させることによって、種々の車両の搬送に対応可能とすることを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の搬送装置は、保持部にて車輪が保持された車両を搬送する搬送装置であって、上記車輪の前後に配置可能な一対のアーム部を有すると共に、少なくとも上記車輪の後側に配置可能なアーム部である後側アーム部が上記車輪に当接可能な当接可能姿勢と上記車輪の移動領域から退避される退避姿勢との間にて旋回可能とされる上記保持部と、該保持部を制御する制御部とを備え、上記制御部が、上記後側アーム部を上記退避姿勢から上記当接可能姿勢に旋回する場合に、上記後側アーム部が上記当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置にて退避姿勢とされた上記後側アーム部を、上記第2の位置から上記第1の位置に移動させながら旋回することを特徴とする。
【0009】
このような特徴を有する本発明の搬送装置によれば、後側アーム部は、後側アーム部が当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置から第1の位置まで移動されながら退避姿勢から当接可能姿勢に旋回される。
【0010】
また、本発明の搬送装置においては、上記車両が前後方向に近接して配置される2つの車輪を備える場合に、上記第2の位置が、該第2の位置にて上記後側アーム部を旋回させた場合に、上記後側アーム部が上記車輪のうち後側の車輪に干渉しない位置に設定され、上記制御部は、上記後側アーム部を上記第2の位置から上記第1の位置に移動させる際に、上記後側アーム部が上記車輪に干渉しないように上記後側アーム部の旋回動作及び移動動作を制御するという構成を採用する。
【0011】
また、本発明の搬送装置においては、上記制御部は、上記第2の位置から上記第1の位置まで上記後側アーム部を一定の速度で移動し、上記後側アーム部の旋回速度を上記後側アーム部が上記車輪に干渉しないように制御するという構成を採用する。
【0012】
また、本発明の搬送装置においては、上記制御部は、上記後側アーム部の先端部が上記車輪間に入り込むまで上記後側アーム部を上記退避姿勢から連続的に旋回し、上記後側アーム部の先端部が上記車輪間に入り込んだ位置から、上記後側アーム部を旋回した場合であっても上記前側の車輪に干渉しない位置まで上記後側アーム部の旋回を停止し、上記後側アーム部が上記干渉しない位置まで移動されてから一定速度で上記当接可能姿勢まで連続的に旋回することによって上記後側アーム部が上記車輪に干渉しないように制御するという構成を採用する。
【0013】
また、本発明の搬送装置においては、上記制御部は、上記後側アーム部の先端部が上記車輪間に入り込むまで上記後側アーム部を上記退避姿勢から連続的に旋回する場合に、上記後側アーム部の上記先端部が上記車輪の手前に位置する場合には相対的に上記後側アーム部を高速に旋回し、上記車輪の手前から車輪間に入り込む位置まで相対的に上記後側アーム部を低速に旋回するという構成を採用する。
【0014】
また、本発明の搬送装置においては、上記制御部は、操作部から入力される車種情報に基づいて記憶部に予め記憶された車両の車輪に関する情報を取得し、取得した上記車両の車輪に関する情報に基づいて上記保持部を制御するという構成を採用する。
【0015】
次に、本発明の搬送方法は、保持部にて車輪が保持された車両を搬送する搬送方法であって、上記車輪の前後に配置可能な一対のアーム部を有すると共に、少なくとも上記車輪の後側に配置可能なアーム部である後側アーム部が上記車輪に当接可能な当接可能姿勢と上記車輪の移動領域から退避される退避姿勢との間にて旋回可能とされる上記保持部を用い、上記後側アーム部を上記退避姿勢から上記当接可能姿勢に旋回する場合に、上記後側アーム部が上記当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置にて退避姿勢とされた上記後側アーム部を、上記第2の位置から上記第1の位置に移動させながら旋回することを特徴とする。
【0016】
このような特徴を有する本発明の搬送方法によれば、後側アーム部は、後側アーム部が当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置から第1の位置まで移動されながら退避姿勢から当接可能姿勢に旋回される。
【0017】
また、本発明の搬送方法においては、上記車両が前後方向に近接して配置される2つの車輪を備える場合に、上記第2の位置が、該第2の位置にて上記後側アーム部を旋回させた場合に、上記後側アーム部が上記車輪のうち後側の車輪に干渉しない位置に設定され、上記後側アーム部を上記第2の位置から上記第1の位置に移動させる際に、上記後側アーム部が上記車輪に干渉しないように上記後側アーム部の旋回動作及び移動動作を行うという構成を採用する。
【0018】
また、本発明の搬送方法においては、上記第2の位置から上記第1の位置まで上記後側アーム部を一定の速度で移動し、上記後側アーム部の旋回速度を上記後側アーム部が上記車輪に干渉しないようするという構成を採用する。
【0019】
また、本発明の搬送方法においては、上記後側アーム部の先端部が上記車輪間に入り込むまで上記後側アーム部を上記退避姿勢から連続的に旋回し、上記後側アーム部の先端部が上記車輪間に入り込んだ位置から、上記後側アーム部を旋回した場合であっても上記前側の車輪に干渉しない位置まで上記後側アーム部の旋回を停止し、上記後側アーム部が上記干渉しない位置まで移動されてから一定速度で上記当接可能姿勢まで連続的に旋回することによって上記後側アーム部が上記車輪に干渉しないようにするという構成を採用する。
【0020】
また、本発明の搬送方法においては、上記後側アーム部の先端部が上記車輪間に入り込むまで上記後側アーム部を上記退避姿勢から連続的に旋回する場合に、上記後側アーム部の上記先端部が上記車輪の手前に位置する場合には相対的に上記後側アーム部を高速に旋回し、上記車輪の手前から車輪間に入り込む位置まで相対的に上記後側アーム部を低速に旋回するという構成を採用する。
【発明の効果】
【0021】
このような特徴を有する本発明の搬送装置及び方法によれば、後側アーム部は、後側アーム部が当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置から第1の位置まで移動されながら退避姿勢から当接可能姿勢に旋回される。このため、後側アーム部の見かけ上の旋回領域を減少させることができ、従来よりも後側アーム部が当接される車輪と後側の障害物との間が狭い場合であっても、当接される車輪と障害物との間に後側アーム部を差し込むことが可能となる。
したがって、本発明によれば、種々の車両の搬送に対応可能となり、特に前輪が前後方向に近接された2つの車輪から構成されている車両の前前輪をアーム部にて保持することが可能となる。
【発明を実施するための最良の形態】
【0022】
以下、図面を参照して、本発明に係る搬送装置及び搬送方法の一実施形態について説明する。なお、以下の図面において、各部材を認識可能な大きさとするために、各部材の縮尺を適宜変更している。
【0023】
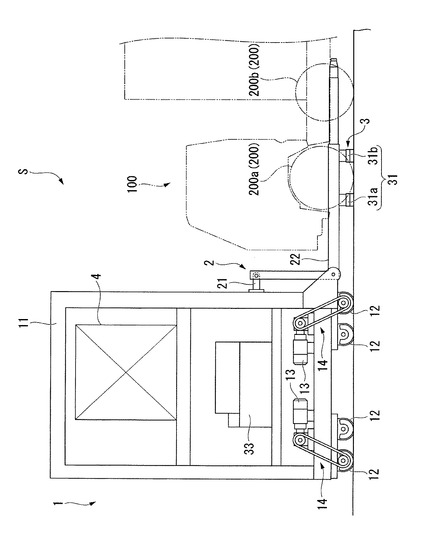
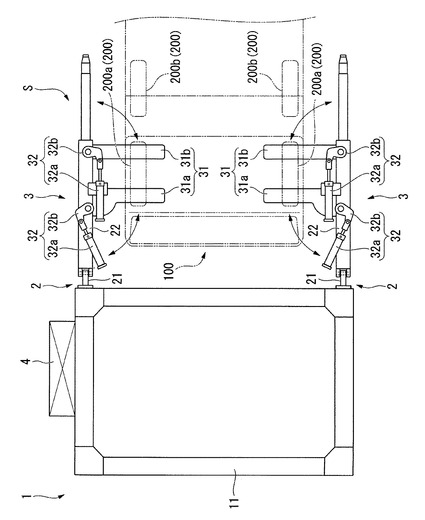
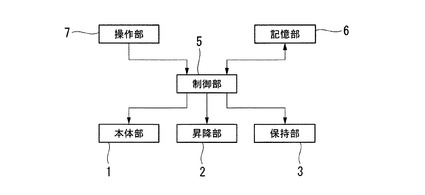
図1及び図2は、本実施形態の搬送装置Sの概略構成を示す図であり、図1が側面図、図2が平面図である。また、図3は、本実施形態の搬送装置Sの電気的な接続関係を示すブロック図である。
これらの図に示すように、本実施形態の搬送装置Sは、本体部1と、昇降部2と、保持部3と、制御盤4とを備えている。
【0024】
本体部1は、支持構造物であるフレーム11と、該フレーム11を走行可能に支持する複数の車輪12と、車輪12を回転駆動させるための出力を生成する走行モータ13と、複数のギアやベルトから構成され該走行モータ13の出力を車輪12に伝達する伝達機構14とを備えている。なお、フレーム11の上部は天井板によって閉じられている。
このような構成の本体部1は、走行モータ13の出力が伝達機構14によって車輪12に伝達され、これによって車輪12が回転駆動されることで、図1及び図2の紙面左右方向に走行可能とされている。
【0025】
昇降部2は、本体部1の走行方向に駆動されるシリンダ21と、該シリンダ21と本体部1とに軸支される略L字形状の支持部22とを備えている。そして、支持部22の張り出し方向の先端部には、後述する保持部3のアーム部31及びアーム部駆動部32が設置されている。
このような構成の昇降部2は、シリンダ21の駆動によって支持部22を上下方向に揺動させ、これによって支持部22に設置されたアーム部31を昇降させる。
なお、図2に示すように、昇降部2は、車両100の停車領域の両側に各々配置されている。
【0026】
保持部3は、アーム部31と、アーム部駆動部32と、油圧装置33とを備えている。
アーム部31は、車両100の車輪200の前側に配置される前側アーム部31aと、車両100の車輪200の後側に配置される後側アーム部31bとから構成されている。また、アーム部駆動部32は、アーム部31を旋回させる方向に駆動される油圧シリンダ32aと、油圧シリンダ32aの駆動力をアーム部31に伝達するリンク部材32bとから構成されている。
そして、図2に示すように、アーム部31は、昇降部2の支持部22の各々に対して設置されている。また、アーム部駆動部32は、アーム部31を構成する前側アーム部31aと後側アーム部31bとの各々に対して設置されている。
油圧装置33は、アーム部駆動部32の油圧シリンダ32aに油圧を伝達することによって駆動するものであり、本体部1のフレーム11に設置されると共に不図示の油圧配管を介して油圧シリンダ32aと接続されている。なお、油圧装置33は、油圧シリンダ32aのみではなく、昇降部2のシリンダ21とも接続されており、シリンダ21の駆動を行う。
【0027】
そして、本実施形態の搬送装置Sにおいて、前側アーム部31aと後側アーム部31bとは、図2に示す矢印方向(水平面に沿う方向)に旋回可能とされており、車輪200に当接可能な当接可能姿勢と、車輪の移動領域から退避される退避姿勢との間にて旋回される。
ここで、当接可能姿勢とは、アーム部31が車両100の進行方向と直交する水平方向(車輪200の軸方向)に延在し、アーム部31の側部にて車輪200と当接可能な姿勢であり、図2に示される姿勢である。また、退避姿勢とは、アーム部31が車両の100の進行方向に沿う方向(車輪200の軸方向と交差する方向)に延在し、車両100と本体部1とが相対移動する場合にアーム部31と車輪200とが干渉しない姿勢である(図5参照)。
なお、アーム部31は、車両100の車輪200を挟み込む必要があることから、図2の矢印に示すように、退避姿勢から当接可能姿勢に旋回される場合には車輪200に接近する方向に旋回され、当接可能姿勢から退避姿勢に旋回される場合には車輪200から離間する方向に旋回される。
つまり、前側アーム部31aは、当接可能姿勢から退避姿勢に旋回される場合には、車両100の前方方向に先端部が向くように旋回される。また、後側アーム部31bは、当接可能姿勢から退避姿勢に旋回される場合には、車両100の後方方向に先端部が向くように旋回される。
【0028】
制御盤4は、図3に示す制御部5及び記憶部6等の本実施形態の搬送装置Sを制御するための機構が一体的に収納されたものであり、図1及び図2に示すように本体部1のフレーム11に対して設置されている。
【0029】
制御部5は、図3に示すように、本体部1、昇降部2、保持部3、記憶部6及び操作部7と電気的に接続されており、本実施形態の搬送装置Sの動作を制御する。
より詳細には、制御部5は、記憶部6に記憶された各種プログラム及び各種データと、操作部7から入力される情報とに基づいて、本体部1の走行モータ13の駆動を制御することによって本体部1の走行を制御し、油圧装置33を介して昇降部2のシリンダ21の駆動を制御することによってアーム部31の昇降を制御し、油圧装置33を介して保持部3の油圧シリンダ32aの駆動を制御することによってアーム部31の旋回を制御する。
なお、本実施形態の搬送装置Sの特徴は、制御部5による制御にあるが、当該制御については、後の搬送装置Sの動作(搬送方法)の説明において詳説する。
【0030】
記憶部6は、上述のように、制御部5が用いる各種プログラム及び各種データを記憶するものである。そして、本実施形態の搬送装置Sにおいて記憶部6は、車種情報に関連付けられた車両の車輪に関する情報を記憶している。より詳細には、記憶部6は、車種ごとの車両の車輪の数や、車輪の離間距離等を車両の車輪に関する情報として記憶している。
【0031】
操作部7(図1及び図2においては不図示)は、例えば車両100の誘導員が車種情報を入力するためのものであり、例えば車両100の誘導員が車種情報を入力しやすい位置に設置されていると共に制御部5と電気的に接続されている。
【0032】
次に、このように構成された本実施形態の搬送装置Sの動作(搬送方法)について、図4のフローチャートを参照して説明する。なお、本実施形態の搬送装置Sの動作の主体者は制御部5である。
【0033】
まず最初に、運転者により車両100が停車領域に停車され、運転者が降車し、誘導員が操作部7に車種情報を入力する(ステップS1)と、制御部5は、入力された車種情報に基づいて車両の車輪に関する情報を取得する。
なお、本動作説明においては、図1に示すように、前前輪200aと後前輪200bとが前後に近接して配置された車両100、すなわち前輪が前後方向に近接して配置される2つの車輪によって構成されている車両100を搬送するものとする。
【0034】
また、ステップS1及びステップS2においては、停車位置に車両100が停車されるまで保持部3が待機状態とされるが、ここで、保持部3のアーム部31は、少なくとも後側アーム部31bが退避姿勢とされている。これによって、車両100が停車領域に停車されるまで、後側アーム部31bと車輪200が干渉することが防止される。
なお、前側アーム部31aは、前側アーム部31aが停車領域に停車された車両100の前前輪200aと当接される位置また、当該当接される位置よりも車両の前方に位置している場合には、当接可能姿勢で待機することが可能である。通常は、本体部1の待機位置は、前側アーム部31aが当接可能姿勢とされた場合に前前輪200aと正確に当接される位置が基準位置とされ、この基準位置で待機している。したがって、前側アーム部31aを当接可能姿勢で待機させることによって前側アーム部31aを車止めとして機能させることができ、停車領域への車両の停車を容易に行うことが可能となる。
【0035】
そして、制御部5は、上述のように車種情報(ステップS1)の入力及び車輪に関する情報の取得(ステップS2)が終了すると、前前輪200a(車輪200)の前後にアーム部31を配置する保持動作(ステップS3)を行う。
制御部5は、当該保持動作を開始するにあたり、後側アーム部31bが当接可能姿勢の場合に前前輪200aと当接される位置(第1の位置)である当接位置A(図5〜図13参照)の設定を、ステップS2にて取得した車輪に関する情報に基づいて行う。なお、上述のように前側アーム部31aが当接可能姿勢でかつ停車領域に停車された車両100の前前輪200aと当接可能な位置に待機している場合には、この位置に対応する後側アーム部31bの位置が当接位置Aとなる。
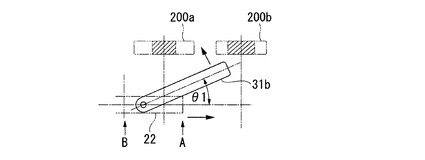
また、制御部5は、当該保持動作を開始するにあたり、当接位置Aよりも前側(車両100の前方側)に後側アーム部31bの旋回を開始する位置(第2の位置)である旋回開始位置Bを設定する。なお、この旋回開始位置Bは、後側アーム部31bが退避姿勢から当接可能姿勢に向けて旋回された場合に、後側アーム部31bの先端が後前輪200bに干渉しない位置に設定される。そして、制御部5は、ステップS2にて取得した車輪に関する情報に基づいて旋回開始位置Bの設定を行う。
【0036】
ここで、図5〜図13を参照して保持動作の詳細な説明を行う。なお、本保持動作において、一方の昇降部2の支持部22に設置された保持部3と、他方の昇降部2の支持部22に設置された保持部3とは、車両100を中心として線対称の動作を行う。このため、以下の説明においては、一方の昇降部2の支持部22に設置された保持部3のみを図示している。さらに、本保持動作においては、前側アーム部31aは常に当接可能姿勢を維持するため、図5〜図13においては視認性を向上させるために前側アーム部31a等の図示を省略し、支持部22、後側アーム部31b及び車輪200(前前輪200a及び後前輪200b)のみを模式的に示している。
また、本保持動作は、前側アーム部31aが当接可能姿勢でかつ停車領域に停車された車両100の前前輪200aと当接可能な位置に待機された状態で、車両100が停車領域に停車された状態、すなわち後側アーム部31bが退避姿勢にて当接位置Aに存在する状態から開始するものとする。
また、図5〜図13において、前前輪200aと後前輪200bとに示されたハッチング領域は、アーム部31が当接される高さにおける断面部分を示すものである。
【0037】
保持動作を開始すると、制御部5は、図5に示すように、後側アーム部31bを退避姿勢が維持された状態で当接位置Aから旋回開始位置Bに向けて移動させ、図6に示すように、旋回開始位置Bまで移動する。この際、前側アーム部31aは、図6に示すように、前前輪200aから離間された位置Cまで移動されることとなる。
なお、制御部5は、本体部1の走行モータ13を駆動して本体部1を走行させることによってアーム部31bを移動させる。
【0038】
続いて、制御部5は、図7に示すように、後側アーム部31bを旋回開始位置Bから当接位置Aに向けて移動させると共に、図8〜図13に示すように後側アーム部31bが旋回開始位置Bから当接位置Aまで移動される間に、後側アーム部31bを退避姿勢から当接可能姿勢まで旋回させる。
ここで、本実施形態の搬送装置Sにおいて制御部5は、後側アーム部31bを旋回開始位置Bから当接位置Aまで移動させるにあたり、後側アーム部31bの移動速度を一定とし、後側アーム部31bの旋回速度を後側アーム部31bが車輪200と干渉しないように調節する。
【0039】
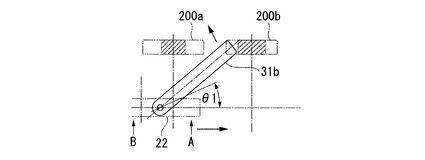
具体的には、制御部5は、図8に示すように、後側アーム部31bの先端部が前前輪200aの手前に位置するまでの旋回角度θ1までは、後側アーム部31bを相対的に高速に旋回する。
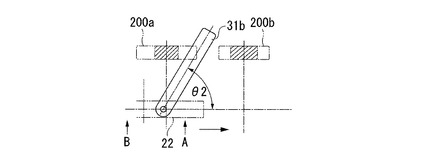
また、制御部5は、図10に示すように、旋回角度θ1から、後側アーム部31bの先端部が前前輪200aと後前輪200bとの間(車輪間)に入り込んだ位置となる旋回角度θ2まで(図9に示す状態)は、後側アーム部31bを相対的に低速に旋回する。
つまり、本実施形態の搬送装置Sにおいては、制御部5は、後側アーム部31bを先端部が前前輪200aと後前輪200bとの間に入り込むまでは連続的に旋回し、先端部が前前輪200aの手前に位置するまでは相対的に高速で旋回し、その後は相対的に低速で旋回する。これによって、後側アーム部31bが前前輪200aと後前輪200bとの間に入り込むまでの時間を短縮し、さらに後側アーム部31bが前前輪200aと後前輪200bとの間に入り込んでからは振動等により後側アーム部31bが車輪200と干渉することを防止することが可能となる。
【0040】
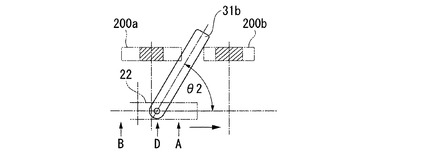
次に、制御部5は、図10に示すように、後側アーム部31bを旋回角度θ2まで旋回すると、一旦後側アーム部31bの旋回を停止する。すなわち、後側アーム部31bの先端部が前前輪200aと後前輪200bとの間に入り込んだ位置にて一旦後側アーム部31bの旋回が停止される。
そして、制御部5は、後側アーム部31bが図11に示すように、一定速度で旋回させた場合に車輪200と干渉することなく当接位置Aにて当接可能姿勢となる位置Dに到達するまで後側アーム部31bを旋回角度θ2のまま旋回を停止し、位置Dに到達した後側アーム部31bの旋回を上記一定速度にて再開する。
【0041】
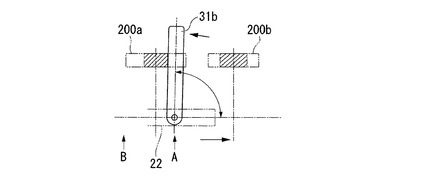
その後、制御部5は、図12に示すように、当接位置Aに到達するまで(すなわち当接可能姿勢となるまで)一定速度で後側アーム部31bを旋回する。そして、制御部5は、後側アーム部31bが当接位置Aにおいて当接可能姿勢となった時点で図13に示すように後側アーム部31bの移動及び旋回を停止する。
この結果、後側アーム部31bが前前輪200aの後側に配置される。また、後側アーム部31bが当接位置Aまで戻ることによって前側アーム部31aが前前輪200aの前側に配置される。したがって、アーム部31が前前輪200aの前後に配置される。
【0042】
そして、図8〜図13に示すように後側アーム部31bの旋回速度を調節することによって、後側アーム部31bを旋回開始位置Bから当接位置Aまで一定速度で移動させた場合に、後側アーム部31bを車輪200と干渉しないように前前輪200aの後側に配置することができる。
このような場合には、制御部5にて変化させる量は後側アーム部31bの旋回速度のみであるため、制御を簡素化することが可能となる。
【0043】
このように本実施形態の搬送装置Sでは、保持動作において、制御部5は、後側アーム部31bを退避姿勢から当接可能姿勢に旋回する場合に、後側アーム部31bが当接可能姿勢とされる当接位置Aよりも前側に設定された旋回開始位置Bにて退避姿勢とされた後側アーム部31bを、旋回開始位置Bから当接位置Aに移動させながら旋回する。
なお、本保持動作における旋回角度θ1、θ2、位置D及び移動速度は、制御部5が、ステップS2にて取得した車両の車輪に関する情報に基づいて設定する。
【0044】
図4に戻り、制御部5は、保持動作(ステップS3)が終了すると、続いて車両の搬送動作(ステップS4)を行う。
より詳細には、制御部5は、油圧装置33を介して昇降部2のシリンダ21を駆動することによって支持部22に支持されたアーム部31を上昇させ、車両100の前側を浮かせる。そして、制御部5は、車両100の前側の浮かせた状態にて本体部1の走行モータ13を駆動させて本体部1を走行させることによって車両100を搬送する。
【0045】
なお、搬送した車両を100を下降させ、アーム部31による保持状態を解除するためには、上述したステップS4とステップS5とを時系列的に逆に行えば良い。
【0046】
以上のような本実施形態の搬送装置及び搬送方法によれば、後側アーム部31bは、後側アーム部31bが当接可能姿勢とされる当接位置Aよりも前側に設定された旋回開始位置Bから当接位置Aまで移動されながら退避姿勢から当接可能姿勢に旋回される。このため、後側アーム部31bの見かけ上の旋回領域を減少させることができ、従来よりも後側アーム部31bが前前輪200a(当接される車輪)と後前輪200b(後側の障害物)との間が狭い場合であっても、前前輪200aと後前輪200bとの間に後側アーム部31bを差し込むことが可能となる。
したがって、本実施形態の搬送装置及び搬送方法によれば、種々の車両の搬送に対応可能となり、特に前輪が前後方向に近接された2つの車輪から構成されている車両の前前輪をアーム部にて保持することが可能となる。
【0047】
以上、図面を参照しながら本発明の好適な実施形態について説明したが、本発明は上記実施形態に限定されるものではない。上述した実施形態において示した各構成部材の諸形状や組み合わせ等は一例であって、本発明の主旨から逸脱しない範囲において設計要求等に基づき種々変更可能である。
【0048】
例えば、上記実施形態においては、後側アーム部31bを旋回開始位置Bから当接位置Aまで移動しながら、退避姿勢から当接可能姿勢に旋回するにあたり、後側アーム部31bの移動速度を一定とし、旋回速度を調節する構成について説明した。
しかしながら、本発明はこれに限定されるものではなく、後側アーム部31bを旋回開始位置Bから当接位置Aまで移動しながら、退避姿勢から当接可能姿勢に旋回するにあたり、後側アーム部31の旋回速度を一定とし、移動速度を調節する構成、または旋回速度及び移動速度を調節する構成を採用しても良い。
【0049】
また、上記実施形態においては、記憶部6に予め車種情報に関連付けられた車両の車輪に関する情報が記憶され、これによって車両の誘導員が車種情報のみを操作部7に入力すれば良い構成を採用した。
しかしながら、本発明はこれに限定されるものではなく、記憶部6に車種情報に関連付けられた車両の車輪に関する情報が記憶されておらず、車両の誘導員が操作部7にて車両の車輪に関する情報を直接入力するようにしても良い。
【0050】
また、上記実施形態においては、後前輪200bを障害物として備える車両100を搬送対象とする構成について説明した。
しかしながら、本発明はこれに限定されるものではなく、他の構成物を障害物として備える車両の搬送及び障害物を備えない車両の搬送を行うこともできる。
【0051】
また、本発明において、前側と後側とは、停車領域に車両を停車させるために車両と搬送装置とを相対移動させた場合における、車両の搬送装置に対する相対移動方向に対する前方と後方とを示す。
つまり、停車領域に車両を停車させるために車両を搬送装置に対して後退させた場合には、車両の運転席側が本発明における後側となり車両の運転席の反対側が本発明における前側となる。
【図面の簡単な説明】
【0052】
【図1】本発明の一実施形態の搬送装置の概略構成を示す側面図である。
【図2】本発明の一実施形態の搬送装置の概略構成を示す平面図である。
【図3】本発明の一実施形態の搬送装置の電気的な接続関係を示すブロック図である。
【図4】本発明の一実施形態の搬送装置の動作を説明するためのフローチャートである。
【図5】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図6】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図7】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図8】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図9】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図10】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図11】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図12】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図13】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【符号の説明】
【0053】
S……搬送装置、1……本体部、2……昇降部、3……保持部、31……アーム部、31a……前側アーム部、31b……後側アーム部、4……制御盤、5……制御部、6……記憶部、7……操作部、100……車両、200……車輪、200a……前前輪(車輪)、200b……後前輪(障害物)、A……当接位置(第1の位置)、B……旋回開始位置(第2の位置)
【技術分野】
【0001】
本発明は、搬送装置及び搬送方法に関するものであり、特に前後方向に近接された2つの車輪を有する車両の搬送に適した搬送装置及び搬送方法に関するものである。
【背景技術】
【0002】
例えば、車両に積まれたコンテナの中身を外部からX線を照射することによって検査する場合には、車両に運転者が乗り込まない状態にて車両をX線装置まで搬送する必要があるため、車輪を保持して持ち上げた状態にて車両を搬送する搬送装置が用いられている。
【0003】
例えば、特許文献1及び2には、車両の車輪の前後に配置される一対のアーム部にて車輪を保持して持ち上げた状態にて搬送する搬送装置が提案されている。
このような搬送装置によれば、アーム部が旋回可能とされており、アーム部を旋回させることによって、基準位置に配置された車輪の前後にアーム部を配置するように構成されている。
【0004】
このような構成を有する搬送装置によれば、特許文献3に提案される搬送装置のように、地下ピットを形成することなく車両の搬送が可能となるため、搬送装置の設置コストが大幅に低減できる等のメリットがある。
【特許文献1】特開2007−331852号公報
【特許文献2】特開2007−331853号公報
【特許文献3】特許第4005828号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、上述のように車輪の前後にアーム部を配置するためには、アーム部を旋回させる必要があり、アーム部を旋回させるための領域を確保する必要がある。
しかしながら、コンテナを積載する車両は様々な種類を有しており、保持する車輪の前後にアーム部の旋回の障害となる障害物が存在する場合もある。このような障害物が存在する車両は、アーム部を車輪の前後に配置できないため、特許文献1及び2に提案された搬送装置にて搬送できない。
このため、種々の車両に対応可能とするためにも、アーム部の旋回領域をより小さくすることが望まれる。
【0006】
特にコンテナを積載する車両は大型のものがあるため、前輪が前後方向に近接された2つの車輪(前前輪、後前輪)から構成されている場合がある。このような2つの前輪を有する車両の前前輪を保持しようとした場合には、前後輪が上記障害物となりアーム部を車両の前後に配置することができない。
【0007】
本発明は、上述する問題点に鑑みてなされたもので、旋回可能な一対のアーム部を車輪の前後に配置し、上記アーム部にて車輪を保持して搬送する搬送装置及び搬送方法において、アーム部の見かけ上の旋回領域を減少させることによって、種々の車両の搬送に対応可能とすることを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の搬送装置は、保持部にて車輪が保持された車両を搬送する搬送装置であって、上記車輪の前後に配置可能な一対のアーム部を有すると共に、少なくとも上記車輪の後側に配置可能なアーム部である後側アーム部が上記車輪に当接可能な当接可能姿勢と上記車輪の移動領域から退避される退避姿勢との間にて旋回可能とされる上記保持部と、該保持部を制御する制御部とを備え、上記制御部が、上記後側アーム部を上記退避姿勢から上記当接可能姿勢に旋回する場合に、上記後側アーム部が上記当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置にて退避姿勢とされた上記後側アーム部を、上記第2の位置から上記第1の位置に移動させながら旋回することを特徴とする。
【0009】
このような特徴を有する本発明の搬送装置によれば、後側アーム部は、後側アーム部が当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置から第1の位置まで移動されながら退避姿勢から当接可能姿勢に旋回される。
【0010】
また、本発明の搬送装置においては、上記車両が前後方向に近接して配置される2つの車輪を備える場合に、上記第2の位置が、該第2の位置にて上記後側アーム部を旋回させた場合に、上記後側アーム部が上記車輪のうち後側の車輪に干渉しない位置に設定され、上記制御部は、上記後側アーム部を上記第2の位置から上記第1の位置に移動させる際に、上記後側アーム部が上記車輪に干渉しないように上記後側アーム部の旋回動作及び移動動作を制御するという構成を採用する。
【0011】
また、本発明の搬送装置においては、上記制御部は、上記第2の位置から上記第1の位置まで上記後側アーム部を一定の速度で移動し、上記後側アーム部の旋回速度を上記後側アーム部が上記車輪に干渉しないように制御するという構成を採用する。
【0012】
また、本発明の搬送装置においては、上記制御部は、上記後側アーム部の先端部が上記車輪間に入り込むまで上記後側アーム部を上記退避姿勢から連続的に旋回し、上記後側アーム部の先端部が上記車輪間に入り込んだ位置から、上記後側アーム部を旋回した場合であっても上記前側の車輪に干渉しない位置まで上記後側アーム部の旋回を停止し、上記後側アーム部が上記干渉しない位置まで移動されてから一定速度で上記当接可能姿勢まで連続的に旋回することによって上記後側アーム部が上記車輪に干渉しないように制御するという構成を採用する。
【0013】
また、本発明の搬送装置においては、上記制御部は、上記後側アーム部の先端部が上記車輪間に入り込むまで上記後側アーム部を上記退避姿勢から連続的に旋回する場合に、上記後側アーム部の上記先端部が上記車輪の手前に位置する場合には相対的に上記後側アーム部を高速に旋回し、上記車輪の手前から車輪間に入り込む位置まで相対的に上記後側アーム部を低速に旋回するという構成を採用する。
【0014】
また、本発明の搬送装置においては、上記制御部は、操作部から入力される車種情報に基づいて記憶部に予め記憶された車両の車輪に関する情報を取得し、取得した上記車両の車輪に関する情報に基づいて上記保持部を制御するという構成を採用する。
【0015】
次に、本発明の搬送方法は、保持部にて車輪が保持された車両を搬送する搬送方法であって、上記車輪の前後に配置可能な一対のアーム部を有すると共に、少なくとも上記車輪の後側に配置可能なアーム部である後側アーム部が上記車輪に当接可能な当接可能姿勢と上記車輪の移動領域から退避される退避姿勢との間にて旋回可能とされる上記保持部を用い、上記後側アーム部を上記退避姿勢から上記当接可能姿勢に旋回する場合に、上記後側アーム部が上記当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置にて退避姿勢とされた上記後側アーム部を、上記第2の位置から上記第1の位置に移動させながら旋回することを特徴とする。
【0016】
このような特徴を有する本発明の搬送方法によれば、後側アーム部は、後側アーム部が当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置から第1の位置まで移動されながら退避姿勢から当接可能姿勢に旋回される。
【0017】
また、本発明の搬送方法においては、上記車両が前後方向に近接して配置される2つの車輪を備える場合に、上記第2の位置が、該第2の位置にて上記後側アーム部を旋回させた場合に、上記後側アーム部が上記車輪のうち後側の車輪に干渉しない位置に設定され、上記後側アーム部を上記第2の位置から上記第1の位置に移動させる際に、上記後側アーム部が上記車輪に干渉しないように上記後側アーム部の旋回動作及び移動動作を行うという構成を採用する。
【0018】
また、本発明の搬送方法においては、上記第2の位置から上記第1の位置まで上記後側アーム部を一定の速度で移動し、上記後側アーム部の旋回速度を上記後側アーム部が上記車輪に干渉しないようするという構成を採用する。
【0019】
また、本発明の搬送方法においては、上記後側アーム部の先端部が上記車輪間に入り込むまで上記後側アーム部を上記退避姿勢から連続的に旋回し、上記後側アーム部の先端部が上記車輪間に入り込んだ位置から、上記後側アーム部を旋回した場合であっても上記前側の車輪に干渉しない位置まで上記後側アーム部の旋回を停止し、上記後側アーム部が上記干渉しない位置まで移動されてから一定速度で上記当接可能姿勢まで連続的に旋回することによって上記後側アーム部が上記車輪に干渉しないようにするという構成を採用する。
【0020】
また、本発明の搬送方法においては、上記後側アーム部の先端部が上記車輪間に入り込むまで上記後側アーム部を上記退避姿勢から連続的に旋回する場合に、上記後側アーム部の上記先端部が上記車輪の手前に位置する場合には相対的に上記後側アーム部を高速に旋回し、上記車輪の手前から車輪間に入り込む位置まで相対的に上記後側アーム部を低速に旋回するという構成を採用する。
【発明の効果】
【0021】
このような特徴を有する本発明の搬送装置及び方法によれば、後側アーム部は、後側アーム部が当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置から第1の位置まで移動されながら退避姿勢から当接可能姿勢に旋回される。このため、後側アーム部の見かけ上の旋回領域を減少させることができ、従来よりも後側アーム部が当接される車輪と後側の障害物との間が狭い場合であっても、当接される車輪と障害物との間に後側アーム部を差し込むことが可能となる。
したがって、本発明によれば、種々の車両の搬送に対応可能となり、特に前輪が前後方向に近接された2つの車輪から構成されている車両の前前輪をアーム部にて保持することが可能となる。
【発明を実施するための最良の形態】
【0022】
以下、図面を参照して、本発明に係る搬送装置及び搬送方法の一実施形態について説明する。なお、以下の図面において、各部材を認識可能な大きさとするために、各部材の縮尺を適宜変更している。
【0023】
図1及び図2は、本実施形態の搬送装置Sの概略構成を示す図であり、図1が側面図、図2が平面図である。また、図3は、本実施形態の搬送装置Sの電気的な接続関係を示すブロック図である。
これらの図に示すように、本実施形態の搬送装置Sは、本体部1と、昇降部2と、保持部3と、制御盤4とを備えている。
【0024】
本体部1は、支持構造物であるフレーム11と、該フレーム11を走行可能に支持する複数の車輪12と、車輪12を回転駆動させるための出力を生成する走行モータ13と、複数のギアやベルトから構成され該走行モータ13の出力を車輪12に伝達する伝達機構14とを備えている。なお、フレーム11の上部は天井板によって閉じられている。
このような構成の本体部1は、走行モータ13の出力が伝達機構14によって車輪12に伝達され、これによって車輪12が回転駆動されることで、図1及び図2の紙面左右方向に走行可能とされている。
【0025】
昇降部2は、本体部1の走行方向に駆動されるシリンダ21と、該シリンダ21と本体部1とに軸支される略L字形状の支持部22とを備えている。そして、支持部22の張り出し方向の先端部には、後述する保持部3のアーム部31及びアーム部駆動部32が設置されている。
このような構成の昇降部2は、シリンダ21の駆動によって支持部22を上下方向に揺動させ、これによって支持部22に設置されたアーム部31を昇降させる。
なお、図2に示すように、昇降部2は、車両100の停車領域の両側に各々配置されている。
【0026】
保持部3は、アーム部31と、アーム部駆動部32と、油圧装置33とを備えている。
アーム部31は、車両100の車輪200の前側に配置される前側アーム部31aと、車両100の車輪200の後側に配置される後側アーム部31bとから構成されている。また、アーム部駆動部32は、アーム部31を旋回させる方向に駆動される油圧シリンダ32aと、油圧シリンダ32aの駆動力をアーム部31に伝達するリンク部材32bとから構成されている。
そして、図2に示すように、アーム部31は、昇降部2の支持部22の各々に対して設置されている。また、アーム部駆動部32は、アーム部31を構成する前側アーム部31aと後側アーム部31bとの各々に対して設置されている。
油圧装置33は、アーム部駆動部32の油圧シリンダ32aに油圧を伝達することによって駆動するものであり、本体部1のフレーム11に設置されると共に不図示の油圧配管を介して油圧シリンダ32aと接続されている。なお、油圧装置33は、油圧シリンダ32aのみではなく、昇降部2のシリンダ21とも接続されており、シリンダ21の駆動を行う。
【0027】
そして、本実施形態の搬送装置Sにおいて、前側アーム部31aと後側アーム部31bとは、図2に示す矢印方向(水平面に沿う方向)に旋回可能とされており、車輪200に当接可能な当接可能姿勢と、車輪の移動領域から退避される退避姿勢との間にて旋回される。
ここで、当接可能姿勢とは、アーム部31が車両100の進行方向と直交する水平方向(車輪200の軸方向)に延在し、アーム部31の側部にて車輪200と当接可能な姿勢であり、図2に示される姿勢である。また、退避姿勢とは、アーム部31が車両の100の進行方向に沿う方向(車輪200の軸方向と交差する方向)に延在し、車両100と本体部1とが相対移動する場合にアーム部31と車輪200とが干渉しない姿勢である(図5参照)。
なお、アーム部31は、車両100の車輪200を挟み込む必要があることから、図2の矢印に示すように、退避姿勢から当接可能姿勢に旋回される場合には車輪200に接近する方向に旋回され、当接可能姿勢から退避姿勢に旋回される場合には車輪200から離間する方向に旋回される。
つまり、前側アーム部31aは、当接可能姿勢から退避姿勢に旋回される場合には、車両100の前方方向に先端部が向くように旋回される。また、後側アーム部31bは、当接可能姿勢から退避姿勢に旋回される場合には、車両100の後方方向に先端部が向くように旋回される。
【0028】
制御盤4は、図3に示す制御部5及び記憶部6等の本実施形態の搬送装置Sを制御するための機構が一体的に収納されたものであり、図1及び図2に示すように本体部1のフレーム11に対して設置されている。
【0029】
制御部5は、図3に示すように、本体部1、昇降部2、保持部3、記憶部6及び操作部7と電気的に接続されており、本実施形態の搬送装置Sの動作を制御する。
より詳細には、制御部5は、記憶部6に記憶された各種プログラム及び各種データと、操作部7から入力される情報とに基づいて、本体部1の走行モータ13の駆動を制御することによって本体部1の走行を制御し、油圧装置33を介して昇降部2のシリンダ21の駆動を制御することによってアーム部31の昇降を制御し、油圧装置33を介して保持部3の油圧シリンダ32aの駆動を制御することによってアーム部31の旋回を制御する。
なお、本実施形態の搬送装置Sの特徴は、制御部5による制御にあるが、当該制御については、後の搬送装置Sの動作(搬送方法)の説明において詳説する。
【0030】
記憶部6は、上述のように、制御部5が用いる各種プログラム及び各種データを記憶するものである。そして、本実施形態の搬送装置Sにおいて記憶部6は、車種情報に関連付けられた車両の車輪に関する情報を記憶している。より詳細には、記憶部6は、車種ごとの車両の車輪の数や、車輪の離間距離等を車両の車輪に関する情報として記憶している。
【0031】
操作部7(図1及び図2においては不図示)は、例えば車両100の誘導員が車種情報を入力するためのものであり、例えば車両100の誘導員が車種情報を入力しやすい位置に設置されていると共に制御部5と電気的に接続されている。
【0032】
次に、このように構成された本実施形態の搬送装置Sの動作(搬送方法)について、図4のフローチャートを参照して説明する。なお、本実施形態の搬送装置Sの動作の主体者は制御部5である。
【0033】
まず最初に、運転者により車両100が停車領域に停車され、運転者が降車し、誘導員が操作部7に車種情報を入力する(ステップS1)と、制御部5は、入力された車種情報に基づいて車両の車輪に関する情報を取得する。
なお、本動作説明においては、図1に示すように、前前輪200aと後前輪200bとが前後に近接して配置された車両100、すなわち前輪が前後方向に近接して配置される2つの車輪によって構成されている車両100を搬送するものとする。
【0034】
また、ステップS1及びステップS2においては、停車位置に車両100が停車されるまで保持部3が待機状態とされるが、ここで、保持部3のアーム部31は、少なくとも後側アーム部31bが退避姿勢とされている。これによって、車両100が停車領域に停車されるまで、後側アーム部31bと車輪200が干渉することが防止される。
なお、前側アーム部31aは、前側アーム部31aが停車領域に停車された車両100の前前輪200aと当接される位置また、当該当接される位置よりも車両の前方に位置している場合には、当接可能姿勢で待機することが可能である。通常は、本体部1の待機位置は、前側アーム部31aが当接可能姿勢とされた場合に前前輪200aと正確に当接される位置が基準位置とされ、この基準位置で待機している。したがって、前側アーム部31aを当接可能姿勢で待機させることによって前側アーム部31aを車止めとして機能させることができ、停車領域への車両の停車を容易に行うことが可能となる。
【0035】
そして、制御部5は、上述のように車種情報(ステップS1)の入力及び車輪に関する情報の取得(ステップS2)が終了すると、前前輪200a(車輪200)の前後にアーム部31を配置する保持動作(ステップS3)を行う。
制御部5は、当該保持動作を開始するにあたり、後側アーム部31bが当接可能姿勢の場合に前前輪200aと当接される位置(第1の位置)である当接位置A(図5〜図13参照)の設定を、ステップS2にて取得した車輪に関する情報に基づいて行う。なお、上述のように前側アーム部31aが当接可能姿勢でかつ停車領域に停車された車両100の前前輪200aと当接可能な位置に待機している場合には、この位置に対応する後側アーム部31bの位置が当接位置Aとなる。
また、制御部5は、当該保持動作を開始するにあたり、当接位置Aよりも前側(車両100の前方側)に後側アーム部31bの旋回を開始する位置(第2の位置)である旋回開始位置Bを設定する。なお、この旋回開始位置Bは、後側アーム部31bが退避姿勢から当接可能姿勢に向けて旋回された場合に、後側アーム部31bの先端が後前輪200bに干渉しない位置に設定される。そして、制御部5は、ステップS2にて取得した車輪に関する情報に基づいて旋回開始位置Bの設定を行う。
【0036】
ここで、図5〜図13を参照して保持動作の詳細な説明を行う。なお、本保持動作において、一方の昇降部2の支持部22に設置された保持部3と、他方の昇降部2の支持部22に設置された保持部3とは、車両100を中心として線対称の動作を行う。このため、以下の説明においては、一方の昇降部2の支持部22に設置された保持部3のみを図示している。さらに、本保持動作においては、前側アーム部31aは常に当接可能姿勢を維持するため、図5〜図13においては視認性を向上させるために前側アーム部31a等の図示を省略し、支持部22、後側アーム部31b及び車輪200(前前輪200a及び後前輪200b)のみを模式的に示している。
また、本保持動作は、前側アーム部31aが当接可能姿勢でかつ停車領域に停車された車両100の前前輪200aと当接可能な位置に待機された状態で、車両100が停車領域に停車された状態、すなわち後側アーム部31bが退避姿勢にて当接位置Aに存在する状態から開始するものとする。
また、図5〜図13において、前前輪200aと後前輪200bとに示されたハッチング領域は、アーム部31が当接される高さにおける断面部分を示すものである。
【0037】
保持動作を開始すると、制御部5は、図5に示すように、後側アーム部31bを退避姿勢が維持された状態で当接位置Aから旋回開始位置Bに向けて移動させ、図6に示すように、旋回開始位置Bまで移動する。この際、前側アーム部31aは、図6に示すように、前前輪200aから離間された位置Cまで移動されることとなる。
なお、制御部5は、本体部1の走行モータ13を駆動して本体部1を走行させることによってアーム部31bを移動させる。
【0038】
続いて、制御部5は、図7に示すように、後側アーム部31bを旋回開始位置Bから当接位置Aに向けて移動させると共に、図8〜図13に示すように後側アーム部31bが旋回開始位置Bから当接位置Aまで移動される間に、後側アーム部31bを退避姿勢から当接可能姿勢まで旋回させる。
ここで、本実施形態の搬送装置Sにおいて制御部5は、後側アーム部31bを旋回開始位置Bから当接位置Aまで移動させるにあたり、後側アーム部31bの移動速度を一定とし、後側アーム部31bの旋回速度を後側アーム部31bが車輪200と干渉しないように調節する。
【0039】
具体的には、制御部5は、図8に示すように、後側アーム部31bの先端部が前前輪200aの手前に位置するまでの旋回角度θ1までは、後側アーム部31bを相対的に高速に旋回する。
また、制御部5は、図10に示すように、旋回角度θ1から、後側アーム部31bの先端部が前前輪200aと後前輪200bとの間(車輪間)に入り込んだ位置となる旋回角度θ2まで(図9に示す状態)は、後側アーム部31bを相対的に低速に旋回する。
つまり、本実施形態の搬送装置Sにおいては、制御部5は、後側アーム部31bを先端部が前前輪200aと後前輪200bとの間に入り込むまでは連続的に旋回し、先端部が前前輪200aの手前に位置するまでは相対的に高速で旋回し、その後は相対的に低速で旋回する。これによって、後側アーム部31bが前前輪200aと後前輪200bとの間に入り込むまでの時間を短縮し、さらに後側アーム部31bが前前輪200aと後前輪200bとの間に入り込んでからは振動等により後側アーム部31bが車輪200と干渉することを防止することが可能となる。
【0040】
次に、制御部5は、図10に示すように、後側アーム部31bを旋回角度θ2まで旋回すると、一旦後側アーム部31bの旋回を停止する。すなわち、後側アーム部31bの先端部が前前輪200aと後前輪200bとの間に入り込んだ位置にて一旦後側アーム部31bの旋回が停止される。
そして、制御部5は、後側アーム部31bが図11に示すように、一定速度で旋回させた場合に車輪200と干渉することなく当接位置Aにて当接可能姿勢となる位置Dに到達するまで後側アーム部31bを旋回角度θ2のまま旋回を停止し、位置Dに到達した後側アーム部31bの旋回を上記一定速度にて再開する。
【0041】
その後、制御部5は、図12に示すように、当接位置Aに到達するまで(すなわち当接可能姿勢となるまで)一定速度で後側アーム部31bを旋回する。そして、制御部5は、後側アーム部31bが当接位置Aにおいて当接可能姿勢となった時点で図13に示すように後側アーム部31bの移動及び旋回を停止する。
この結果、後側アーム部31bが前前輪200aの後側に配置される。また、後側アーム部31bが当接位置Aまで戻ることによって前側アーム部31aが前前輪200aの前側に配置される。したがって、アーム部31が前前輪200aの前後に配置される。
【0042】
そして、図8〜図13に示すように後側アーム部31bの旋回速度を調節することによって、後側アーム部31bを旋回開始位置Bから当接位置Aまで一定速度で移動させた場合に、後側アーム部31bを車輪200と干渉しないように前前輪200aの後側に配置することができる。
このような場合には、制御部5にて変化させる量は後側アーム部31bの旋回速度のみであるため、制御を簡素化することが可能となる。
【0043】
このように本実施形態の搬送装置Sでは、保持動作において、制御部5は、後側アーム部31bを退避姿勢から当接可能姿勢に旋回する場合に、後側アーム部31bが当接可能姿勢とされる当接位置Aよりも前側に設定された旋回開始位置Bにて退避姿勢とされた後側アーム部31bを、旋回開始位置Bから当接位置Aに移動させながら旋回する。
なお、本保持動作における旋回角度θ1、θ2、位置D及び移動速度は、制御部5が、ステップS2にて取得した車両の車輪に関する情報に基づいて設定する。
【0044】
図4に戻り、制御部5は、保持動作(ステップS3)が終了すると、続いて車両の搬送動作(ステップS4)を行う。
より詳細には、制御部5は、油圧装置33を介して昇降部2のシリンダ21を駆動することによって支持部22に支持されたアーム部31を上昇させ、車両100の前側を浮かせる。そして、制御部5は、車両100の前側の浮かせた状態にて本体部1の走行モータ13を駆動させて本体部1を走行させることによって車両100を搬送する。
【0045】
なお、搬送した車両を100を下降させ、アーム部31による保持状態を解除するためには、上述したステップS4とステップS5とを時系列的に逆に行えば良い。
【0046】
以上のような本実施形態の搬送装置及び搬送方法によれば、後側アーム部31bは、後側アーム部31bが当接可能姿勢とされる当接位置Aよりも前側に設定された旋回開始位置Bから当接位置Aまで移動されながら退避姿勢から当接可能姿勢に旋回される。このため、後側アーム部31bの見かけ上の旋回領域を減少させることができ、従来よりも後側アーム部31bが前前輪200a(当接される車輪)と後前輪200b(後側の障害物)との間が狭い場合であっても、前前輪200aと後前輪200bとの間に後側アーム部31bを差し込むことが可能となる。
したがって、本実施形態の搬送装置及び搬送方法によれば、種々の車両の搬送に対応可能となり、特に前輪が前後方向に近接された2つの車輪から構成されている車両の前前輪をアーム部にて保持することが可能となる。
【0047】
以上、図面を参照しながら本発明の好適な実施形態について説明したが、本発明は上記実施形態に限定されるものではない。上述した実施形態において示した各構成部材の諸形状や組み合わせ等は一例であって、本発明の主旨から逸脱しない範囲において設計要求等に基づき種々変更可能である。
【0048】
例えば、上記実施形態においては、後側アーム部31bを旋回開始位置Bから当接位置Aまで移動しながら、退避姿勢から当接可能姿勢に旋回するにあたり、後側アーム部31bの移動速度を一定とし、旋回速度を調節する構成について説明した。
しかしながら、本発明はこれに限定されるものではなく、後側アーム部31bを旋回開始位置Bから当接位置Aまで移動しながら、退避姿勢から当接可能姿勢に旋回するにあたり、後側アーム部31の旋回速度を一定とし、移動速度を調節する構成、または旋回速度及び移動速度を調節する構成を採用しても良い。
【0049】
また、上記実施形態においては、記憶部6に予め車種情報に関連付けられた車両の車輪に関する情報が記憶され、これによって車両の誘導員が車種情報のみを操作部7に入力すれば良い構成を採用した。
しかしながら、本発明はこれに限定されるものではなく、記憶部6に車種情報に関連付けられた車両の車輪に関する情報が記憶されておらず、車両の誘導員が操作部7にて車両の車輪に関する情報を直接入力するようにしても良い。
【0050】
また、上記実施形態においては、後前輪200bを障害物として備える車両100を搬送対象とする構成について説明した。
しかしながら、本発明はこれに限定されるものではなく、他の構成物を障害物として備える車両の搬送及び障害物を備えない車両の搬送を行うこともできる。
【0051】
また、本発明において、前側と後側とは、停車領域に車両を停車させるために車両と搬送装置とを相対移動させた場合における、車両の搬送装置に対する相対移動方向に対する前方と後方とを示す。
つまり、停車領域に車両を停車させるために車両を搬送装置に対して後退させた場合には、車両の運転席側が本発明における後側となり車両の運転席の反対側が本発明における前側となる。
【図面の簡単な説明】
【0052】
【図1】本発明の一実施形態の搬送装置の概略構成を示す側面図である。
【図2】本発明の一実施形態の搬送装置の概略構成を示す平面図である。
【図3】本発明の一実施形態の搬送装置の電気的な接続関係を示すブロック図である。
【図4】本発明の一実施形態の搬送装置の動作を説明するためのフローチャートである。
【図5】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図6】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図7】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図8】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図9】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図10】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図11】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図12】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【図13】本発明の一実施形態の搬送装置の動作を説明するための説明図である。
【符号の説明】
【0053】
S……搬送装置、1……本体部、2……昇降部、3……保持部、31……アーム部、31a……前側アーム部、31b……後側アーム部、4……制御盤、5……制御部、6……記憶部、7……操作部、100……車両、200……車輪、200a……前前輪(車輪)、200b……後前輪(障害物)、A……当接位置(第1の位置)、B……旋回開始位置(第2の位置)
【特許請求の範囲】
【請求項1】
保持部にて車輪が保持された車両を搬送する搬送装置であって、
前記車輪の前後に配置可能な一対のアーム部を有すると共に、少なくとも前記車輪の後側に配置可能なアーム部である後側アーム部が前記車輪に当接可能な当接可能姿勢と前記車輪の移動領域から退避される退避姿勢との間にて旋回可能とされる前記保持部と、該保持部を制御する制御部とを備え、
前記制御部は、前記後側アーム部を前記退避姿勢から前記当接可能姿勢に旋回する場合に、前記後側アーム部が前記当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置にて退避姿勢とされた前記後側アーム部を、前記第2の位置から前記第1の位置に移動させながら旋回することを特徴とする搬送装置。
【請求項2】
前記車両が前後方向に近接して配置される2つの車輪を備える場合に、
前記第2の位置が、該第2の位置にて前記後側アーム部を旋回させた場合に、前記後側アーム部が前記車輪のうち後側の車輪に干渉しない位置に設定され、
前記制御部は、前記後側アーム部を前記第2の位置から前記第1の位置に移動させる際に、前記後側アーム部が前記車輪に干渉しないように前記後側アーム部の旋回動作及び移動動作を制御する
ことを特徴とする請求項1記載の搬送装置。
【請求項3】
前記制御部は、前記第2の位置から前記第1の位置まで前記後側アーム部を一定の速度で移動し、前記後側アーム部の旋回速度を前記後側アーム部が前記車輪に干渉しないように制御することを特徴とする請求項2記載の搬送装置。
【請求項4】
前記制御部は、
前記後側アーム部の先端部が前記車輪間に入り込むまで前記後側アーム部を前記退避姿勢から連続的に旋回し、
前記後側アーム部の先端部が前記車輪間に入り込んだ位置から、前記後側アーム部を旋回した場合であっても前記前側の車輪に干渉しない位置まで前記後側アーム部の旋回を停止し、
前記後側アーム部が前記干渉しない位置まで移動されてから一定速度で前記当接可能姿勢まで連続的に旋回する
ことによって前記後側アーム部が前記車輪に干渉しないように制御することを特徴とする請求項2または3記載の搬送装置。
【請求項5】
前記制御部は、前記後側アーム部の先端部が前記車輪間に入り込むまで前記後側アーム部を前記退避姿勢から連続的に旋回する場合に、前記後側アーム部の前記先端部が前記車輪の手前に位置する場合には相対的に前記後側アーム部を高速に旋回し、前記車輪の手前から車輪間に入り込む位置まで相対的に前記後側アーム部を低速に旋回することを特徴とする請求項4記載の搬送装置。
【請求項6】
前記制御部は、操作部から入力される車種情報に基づいて記憶部に予め記憶された車両の車輪に関する情報を取得し、取得した前記車両の車輪に関する情報に基づいて前記保持部を制御することを特徴とする請求項1〜5いずれかに記載の搬送装置。
【請求項7】
保持部にて車輪が保持された車両を搬送する搬送方法であって、
前記車輪の前後に配置可能な一対のアーム部を有すると共に、少なくとも前記車輪の後側に配置可能なアーム部である後側アーム部が前記車輪に当接可能な当接可能姿勢と前記車輪の移動領域から退避される退避姿勢との間にて旋回可能とされる前記保持部を用い、
前記後側アーム部を前記退避姿勢から前記当接可能姿勢に旋回する場合に、前記後側アーム部が前記当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置にて退避姿勢とされた前記後側アーム部を、前記第2の位置から前記第1の位置に移動させながら旋回することを特徴とする搬送方法。
【請求項8】
前記車両が前後方向に近接して配置される2つの車輪を備える場合に、
前記第2の位置が、該第2の位置にて前記後側アーム部を旋回させた場合に、前記後側アーム部が前記車輪のうち後側の車輪に干渉しない位置に設定され、
前記後側アーム部を前記第2の位置から前記第1の位置に移動させる際に、前記後側アーム部が前記車輪に干渉しないように前記後側アーム部の旋回動作及び移動動作を行う
ことを特徴とする請求項7記載の搬送方法。
【請求項9】
前記第2の位置から前記第1の位置まで前記後側アーム部を一定の速度で移動し、前記後側アーム部の旋回速度を前記後側アーム部が前記車輪に干渉しないようすることを特徴とする請求項8記載の搬送方法。
【請求項10】
前記後側アーム部の先端部が前記車輪間に入り込むまで前記後側アーム部を前記退避姿勢から連続的に旋回し、
前記後側アーム部の先端部が前記車輪間に入り込んだ位置から、前記後側アーム部を旋回した場合であっても前記前側の車輪に干渉しない位置まで前記後側アーム部の旋回を停止し、
前記後側アーム部が前記干渉しない位置まで移動されてから一定速度で前記当接可能姿勢まで連続的に旋回する
ことによって前記後側アーム部が前記車輪に干渉しないようにすることを特徴とする請求項8または9記載の搬送方法。
【請求項11】
前記後側アーム部の先端部が前記車輪間に入り込むまで前記後側アーム部を前記退避姿勢から連続的に旋回する場合に、前記後側アーム部の前記先端部が前記車輪の手前に位置する場合には相対的に前記後側アーム部を高速に旋回し、前記車輪の手前から車輪間に入り込む位置まで相対的に前記後側アーム部を低速に旋回することを特徴とする請求項10記載の搬送方法。
【請求項1】
保持部にて車輪が保持された車両を搬送する搬送装置であって、
前記車輪の前後に配置可能な一対のアーム部を有すると共に、少なくとも前記車輪の後側に配置可能なアーム部である後側アーム部が前記車輪に当接可能な当接可能姿勢と前記車輪の移動領域から退避される退避姿勢との間にて旋回可能とされる前記保持部と、該保持部を制御する制御部とを備え、
前記制御部は、前記後側アーム部を前記退避姿勢から前記当接可能姿勢に旋回する場合に、前記後側アーム部が前記当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置にて退避姿勢とされた前記後側アーム部を、前記第2の位置から前記第1の位置に移動させながら旋回することを特徴とする搬送装置。
【請求項2】
前記車両が前後方向に近接して配置される2つの車輪を備える場合に、
前記第2の位置が、該第2の位置にて前記後側アーム部を旋回させた場合に、前記後側アーム部が前記車輪のうち後側の車輪に干渉しない位置に設定され、
前記制御部は、前記後側アーム部を前記第2の位置から前記第1の位置に移動させる際に、前記後側アーム部が前記車輪に干渉しないように前記後側アーム部の旋回動作及び移動動作を制御する
ことを特徴とする請求項1記載の搬送装置。
【請求項3】
前記制御部は、前記第2の位置から前記第1の位置まで前記後側アーム部を一定の速度で移動し、前記後側アーム部の旋回速度を前記後側アーム部が前記車輪に干渉しないように制御することを特徴とする請求項2記載の搬送装置。
【請求項4】
前記制御部は、
前記後側アーム部の先端部が前記車輪間に入り込むまで前記後側アーム部を前記退避姿勢から連続的に旋回し、
前記後側アーム部の先端部が前記車輪間に入り込んだ位置から、前記後側アーム部を旋回した場合であっても前記前側の車輪に干渉しない位置まで前記後側アーム部の旋回を停止し、
前記後側アーム部が前記干渉しない位置まで移動されてから一定速度で前記当接可能姿勢まで連続的に旋回する
ことによって前記後側アーム部が前記車輪に干渉しないように制御することを特徴とする請求項2または3記載の搬送装置。
【請求項5】
前記制御部は、前記後側アーム部の先端部が前記車輪間に入り込むまで前記後側アーム部を前記退避姿勢から連続的に旋回する場合に、前記後側アーム部の前記先端部が前記車輪の手前に位置する場合には相対的に前記後側アーム部を高速に旋回し、前記車輪の手前から車輪間に入り込む位置まで相対的に前記後側アーム部を低速に旋回することを特徴とする請求項4記載の搬送装置。
【請求項6】
前記制御部は、操作部から入力される車種情報に基づいて記憶部に予め記憶された車両の車輪に関する情報を取得し、取得した前記車両の車輪に関する情報に基づいて前記保持部を制御することを特徴とする請求項1〜5いずれかに記載の搬送装置。
【請求項7】
保持部にて車輪が保持された車両を搬送する搬送方法であって、
前記車輪の前後に配置可能な一対のアーム部を有すると共に、少なくとも前記車輪の後側に配置可能なアーム部である後側アーム部が前記車輪に当接可能な当接可能姿勢と前記車輪の移動領域から退避される退避姿勢との間にて旋回可能とされる前記保持部を用い、
前記後側アーム部を前記退避姿勢から前記当接可能姿勢に旋回する場合に、前記後側アーム部が前記当接可能姿勢とされる第1の位置よりも前側に設定された第2の位置にて退避姿勢とされた前記後側アーム部を、前記第2の位置から前記第1の位置に移動させながら旋回することを特徴とする搬送方法。
【請求項8】
前記車両が前後方向に近接して配置される2つの車輪を備える場合に、
前記第2の位置が、該第2の位置にて前記後側アーム部を旋回させた場合に、前記後側アーム部が前記車輪のうち後側の車輪に干渉しない位置に設定され、
前記後側アーム部を前記第2の位置から前記第1の位置に移動させる際に、前記後側アーム部が前記車輪に干渉しないように前記後側アーム部の旋回動作及び移動動作を行う
ことを特徴とする請求項7記載の搬送方法。
【請求項9】
前記第2の位置から前記第1の位置まで前記後側アーム部を一定の速度で移動し、前記後側アーム部の旋回速度を前記後側アーム部が前記車輪に干渉しないようすることを特徴とする請求項8記載の搬送方法。
【請求項10】
前記後側アーム部の先端部が前記車輪間に入り込むまで前記後側アーム部を前記退避姿勢から連続的に旋回し、
前記後側アーム部の先端部が前記車輪間に入り込んだ位置から、前記後側アーム部を旋回した場合であっても前記前側の車輪に干渉しない位置まで前記後側アーム部の旋回を停止し、
前記後側アーム部が前記干渉しない位置まで移動されてから一定速度で前記当接可能姿勢まで連続的に旋回する
ことによって前記後側アーム部が前記車輪に干渉しないようにすることを特徴とする請求項8または9記載の搬送方法。
【請求項11】
前記後側アーム部の先端部が前記車輪間に入り込むまで前記後側アーム部を前記退避姿勢から連続的に旋回する場合に、前記後側アーム部の前記先端部が前記車輪の手前に位置する場合には相対的に前記後側アーム部を高速に旋回し、前記車輪の手前から車輪間に入り込む位置まで相対的に前記後側アーム部を低速に旋回することを特徴とする請求項10記載の搬送方法。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】

【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2009−234523(P2009−234523A)
【公開日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願番号】特願2008−86247(P2008−86247)
【出願日】平成20年3月28日(2008.3.28)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成21年10月15日(2009.10.15)
【国際特許分類】
【出願日】平成20年3月28日(2008.3.28)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]