
機械設備における異常診断システム

【課題】安価な導入、メンテナンスにかかる労力の大幅削減、かつ、初期の微小な異常の早期検知ができる、機械設備における異常診断システムを提供することを目的とする。
【解決手段】機械設備に設置したセンサで測定した信号を分析することにより、機械設備の異常を検知する機械設備における異常診断システムであって、測定信号から2つ以上の期間傾向成分に分離する傾向成分分離部と、該傾向成分分離部で分離した各期間傾向成分から、異常発生時の信号のパターンを特徴づける複数の特徴的な情報量を抽出する特徴的情報量抽出部と、該特徴的情報量抽出部で抽出された複数の特徴的な情報量に基づいて機械設備の異常を検知する異常判定部とを備える。
【解決手段】機械設備に設置したセンサで測定した信号を分析することにより、機械設備の異常を検知する機械設備における異常診断システムであって、測定信号から2つ以上の期間傾向成分に分離する傾向成分分離部と、該傾向成分分離部で分離した各期間傾向成分から、異常発生時の信号のパターンを特徴づける複数の特徴的な情報量を抽出する特徴的情報量抽出部と、該特徴的情報量抽出部で抽出された複数の特徴的な情報量に基づいて機械設備の異常を検知する異常判定部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、機械設備の異常診断技術に関し、特に回転機械から得られる振動データを解析することにより初期の微小な異常を早期に検知する、機械設備における異常診断システムに関するものである。
【背景技術】
【0002】
回転機械の稼動状態の良否を判定する従来技術としては、次のような技術が知られている。先ず第1の技術として、回転機器に発生する振動変位、振動速度、振動加速度等を計測し、その計測値から、振動の最大値や実効値などを求め、それらの値を基準値と比較することにより、正常、注意、危険の判定を行う技術を挙げることができる。
【0003】
次に上記技術を発展させた第2の技術として、例えば特許文献1で開示された技術がある。これは上記基準値を回転機器の状態等により自動更新する方法である。
【0004】
さらに第3の技術として、例えば特許文献2で開示された技術がある。これは、周波数解析により、異常状態に起因する基本周波数成分とその自然数倍の周波数成分の大きさを比較する技術である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平1−270623号公報
【特許文献2】特開2003−232674号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した背景技術には次のような問題がある。先ず第1の技術には、振動を計測するセンサの取付け対象設備および取付け位置、さらに計測時における機械設備の状態等により、振動レベルやノイズレベルが変わり、適切な基準値を与えるのが難しいという問題がある。
【0007】
また第2の技術は、上記問題点を解決するために考案された技術であるが、緩やかに振動レベルが上昇していく場合や、ノイズの出現の仕方に変化がある場合などには、適切な基準値が得られにくいという問題がある。
【0008】
さらに第3の技術には、周波数解析を行うため、計算負荷が高く、特に監視対象が数千点に及ぶような巨大なシステムで実現するにはコストが非常に高くなるという問題がある。
【0009】
本発明は、上記事情に鑑みてなされたもので、安価な導入、メンテナンスにかかる労力の大幅削減、かつ、初期の微小な異常を早期に漏れなく検知ができる、機械設備における異常診断システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の請求項1に係る発明は、機械設備に設置したセンサで測定した信号を分析することにより、機械設備の異常を検知する機械設備における異常診断システムであって、測定信号から2つ以上の期間傾向成分に分離する傾向成分分離部と、該傾向成分分離部で分離した各期間傾向成分から、異常発生時の信号のパターンを特徴づける複数の特徴的な情報量を抽出する特徴的情報量抽出部と、該特徴的情報量抽出部で抽出された複数の特徴的な情報量に基づいて機械設備の異常を検知する異常判定部とを備えることを特徴とする機械設備における異常診断システムである。
【0011】
また本発明の請求項2に係る発明は、請求項1に記載の機械設備における異常診断システムにおいて、前記複数の特徴的な情報量は、長期傾向成分に対して、所定期間で積分を行い、得られる積分値を正規化することにより求めた、所定期間における正規化された増加率を示す情報量1と、前記長期傾向成分の傾きを求め、得られる傾きを正規化することにより求めた、評価対象時刻における瞬間的な正規化された増加率を示す情報量2と、短期傾向成分に対して、所定期間における閾値以上の変動の個数をカウントすることによって得られるカウント数を示す情報量3とであることを特徴とする機械設備における異常診断システムである。
【0012】
また本発明の請求項3に係る発明は、請求項1または2に記載の機械設備における異常診断システムにおいて、前記期間傾向成分に分離するにあたっては、測定信号に対して、異なる2つの指数平滑係数を用いた指数平滑処理を行うことにより分離することを特徴とする機械設備における異常診断システムである。
【0013】
また本発明の請求項4に係る発明は、請求項3に記載の機械設備における異常診断システムにおいて、前記傾向成分分離部の前段に、予め設定する過去区間の測定信号の平均、標準偏差から逐次推定を行って、仮の短期異常の判定用閾値を求め、該判定用閾値を測定信号が超えたのち、予め設定した期間以内に測定信号のレベルが低下し、前記上限値以下となる場合は仮の短期異常と判定する事前判定部を備え、該事前判定部で仮の短期異常と判定した場合は、前記傾向成分分離部において前記指数平滑処理を行わず、各期間傾向成分を前記判定用閾値を越える前の分値とすることを特徴とする機械設備における異常診断システムである。
【0014】
さらに本発明の請求項5に係る発明は、請求項1〜4のいずれか1項に記載の機械設備における異常診断システムにおいて、前記複数の特徴的な情報量から、平均値および標準偏差を逐次求め、該平均値および標準偏差を用いて逐次正規化値を算出する、逐次正規化値算出部と、該逐次正規化値算出部で算出された逐次正規化値に基づいて機械設備の異常を検知する異常判定部とを備えることを特徴とする機械設備における異常診断システムである。
【発明の効果】
【0015】
本発明は、簡単なロジックを用いているため、既存のシステムに安価に導入でき、かつ、初期の微小な異常を早期に漏れなく検知できるようになる。また、異常を検知するための特徴的な情報量が変化率等の相対値であるため、大量にある監視対象に対して同一の上限値を設定することができ、メンテナンスにかける労力を大幅に削減することが可能となる。
【図面の簡単な説明】
【0016】
【図1】本実施形態1における異常診断システムの構成例を示す図である。
【図2】本実施形態1で異常を早期に検知したい代表的事例を説明する図である。
【図3】長期傾向成分、中期傾向成分、短期傾向成分へ分離した結果を示す図である。
【図4】抽出した成分から特徴的情報量を抽出した結果を示す図である。
【図5】本実施形態2で異常を早期に検知したい代表的事例を説明する図である。
【図6】本実施形態1の処理による長期傾向成分の抽出結果を示す図である。
【図7】本実施形態2の処理による長期傾向成分の抽出結果を示す図である。
【図8】本実施形態2における異常診断システムの構成例を示す図である。
【図9】事前判定部における具体的な処理手順例を示す図である。
【図10】本実施形態3における異常診断システムの構成例を示す図である。
【図11】異常発生時の形態が異なる事例に対し本実施形態3を適用した結果の一例を示す図である。
【発明を実施するための形態】
【0017】
(実施形態1)
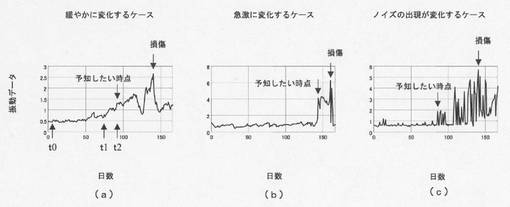
以下、図面および数式を参照しながら、本発明を具体的に説明してゆく。図2は、本実施形態1で異常を早期に検知したい代表的事例を説明する図である。この図で示す各データは、回転機器の軸受部に設置した振動計で計測された加速度の実効値の時間推移データである。
【0018】
従来の異常診断システムでは、注意レベル、危険レベルの2つの上限値が設定されおり、これら上限値を超えると警報が出力される。しかし、図2に示した代表例は、いずれも最終的には、図中にそれぞれ矢印で示した時点で機器損傷に至った事例であり、さらに機器損傷に至る前にある、異常予知したい時点として図中に矢印で示したタイミングで異常の検知ができていれば、潤滑油や部品の交換をすることにより、機器の損傷を避けることができた事例である。
【0019】
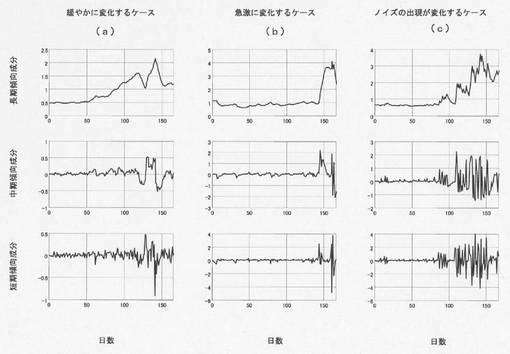
様々なデータを解析した結果、機器損傷に至るまでには、図で示すように、異常発生の形態は、緩やかに上昇していく場合(a)、急激に上昇する場合(b)、短期的な変動の出現が大きく変わる場合(c)と、大きく3つの形態に分類できることに気づいた。
【0020】
そこで、本発明では、これら3つの形態にあった異常の早期検知方法を考案した。始めに、振動データを長期傾向成分、中期傾向成分、短期傾向成分へ分離する。なお、ここで、長期、中期および短期と称しているが、絶対的な期間の長さを表すものではなく、あくまでも対象とするデータ区間に対する相対的な長短を表すものである。
【0021】
成分分離は、長期傾向成分に対しては、中期的なうねりや短期的な変動が除去されるように、逆に、短期傾向成分に対しては、長期的なトレンドや中期的なうねりが除去されるように分離する。これにより3つのパターンを特徴的に示す情報量を抽出しやすくする。
【0022】
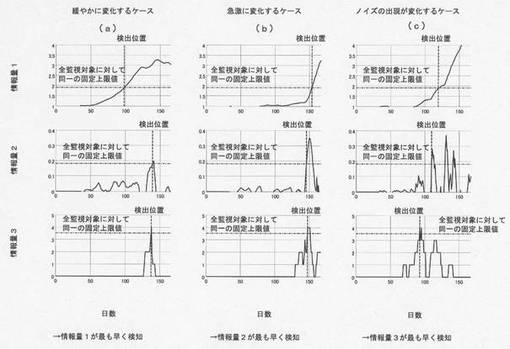
次に、緩やかに上昇していくケースに対しては、中期的うねりや短期的変動が除去された長期傾向成分に対して、所定の一定期間で積分を行い、得られた積分値を正規化することにより求めた一定期間における正規化された増加率により特徴づけることができる。これを情報量1とする。
【0023】
急激に上昇するケースに対しては、長期傾向成分の傾きを求め、得られた傾きを正規化することにより求めた評価対象時刻における瞬間的な正規化された増加率により特徴づけることができる。これを情報量2とする。傾きの算出としては、単純に前回値との差分をとる方法も考えられるが、一般に変動が大きく不安定である。そこで、傾きを求めたい時刻から過去に遡り、遠い過去ほど重みをゼロにし、傾きを求めたい時刻に近いほど重みを大きくつけた後、回帰を行う、いわゆる局所重み回帰により、安定的な傾きを算出する。
【0024】
短期的な変動の出現が大きく変わるケースに対しては、長期的なトレンドや中期的なうねりが除去された短期傾向成分に対して、所定の一定期間における一定以上の変動の個数をカウントし、得られたカウント数により特徴づけることができる。これを情報量3とする。短期傾向成分は長期的なトレンドや中期的なうねりが除去されているので、このような処理を正確に、かつ、簡単に行うことができるようになる。
【0025】
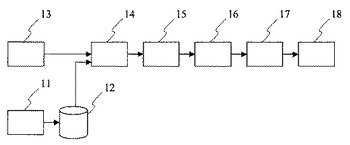
図1は、本実施形態1における異常診断システムの構成例を示す図である。図1中、11はセンサ、12はデータベース、13は初期設定部、14はメモリデータ更新部、15は傾向成分分離部、16は特徴的情報量抽出部、17は異常判定部、および18は出力部をそれぞれ表す。
【0026】
まず、各種物理量を測定するセンサ11からの測定データは、データベース12で記憶される。初期設定部13では、後段の処理で用いるパラメータの設定、処理を始めるに当たっての初期条件の設定を行う。
【0027】
次のメモリデータ更新部14では、最新時刻kにおける各種測定データ(振動データなど)をデータベース12から取込み、最も古いデータをメモリから破棄する処理を行う。最新時刻kにおける各種測定データ(振動データなど)をセンサ11からメモリデータ更新部14へ直接ロードしたり、計算に必要なデータ(過去のデータを含む)を毎回、データベースに直接アクセスする方法でも構わないが、監視点数が多い場合、処理速度が著しく劣化するので、必要データをメモリデータ更新部14にロードしておくことが望ましい。
【0028】
傾向成分分離部15では、メモリデータ更新部14にロードされた最新時刻kにおける各種測定データ、およびデータベース12に記憶されている現時刻k以前の過去のデータを用いて、長期(長期的なトレンド)、中期(中期的なうねり)、短期(短期的な変動)への成分分離を行う。成分の分離には、異なる2つの指数平滑係数を用いた指数平滑処理により求める。具体的には、機械設備から得られた時刻kにおける信号Y(k)と時刻k-1における信号Y(k-1)から、予め設定した係数α1,α2を用いて、以下に示す(1)、(2)式のように逐次的に求める。
【0029】
S1(k)=S1(k-1)+α1(Y(k-1) - S1(k-1) ) ・・・・・(1)
S2(k)=S2(k-1)+α2(Y(k-1) - S2(k-1) ) ・・・・・(2)
ここで、kは2からスタートする整数とし、初期値として、S1(1)=Y(1)およびS2(1)=Y(1)とする。ここで、(1)式は、信号から短期傾向成分(短期的な変動)と中期傾向成分(中期的なうねり)を除去するようにした式に相当し、(2)式は、信号から短期傾向成分を除去するようにした式に相当する。
【0030】
なお、係数α1,α2の値については、ステップ応答をシミュレートすることで求めることができる。例えば、データが一日に1回の頻度で編集される場合、α1=0.2、α2=0.9とすると、長期傾向成分については、値が最終値の63%に達する期間(時定数)が5日、最終値の99%に達する期間が約20日であり、中期傾向成分については、値が最終値の63%に達する期間(時定数)が1日未満、最終値の99%に達する期間が2〜3日となる。なお、期間は、対象により適宜設定すれば良く、α1、α2の値を期間に応じて決めればよい。
【0031】
得られたS1(k),S2(k)から時刻kにおける長期傾向成分T1(k)、中期傾向成分T2(k)、および短期傾向成分T3(k)を、それぞれ(3)〜(5)式のように求める。
【0032】
T1(k)=S1(k) ・・・・・(3)
T2(k)=S2(k)-S1(k) ・・・・・(4)
T3(k)=Y(k)-S2(k) ・・・・・(5)
次に特徴的情報量抽出部16では、異常出現時の変化パターン情報量を抽出する。前述のように、様々なデータを解析した結果、異常発生の形態は、大きく3つに分類されることがわかった。1つめは緩やかに上昇していく場合、2つめは急激に上昇する場合、3つめは短期的な変動の出現が大きく変わる場合である。そこで、これらの形態にあった特徴的な情報量を抽出する。
【0033】
前述の傾向成分分離部15で、異なる3つの期間の短期、中期、長期の各々の傾向成分を求めたが、特徴的情報量抽出部16では、そのうちの期間が離れている短期傾向成分と長期傾向成分の2つを用いて特徴的な情報量を算出する。緩やかに上昇していくケースに対しては、以下の(6)式により算出し情報量1P1(k)とする。
【0034】
【数1】

【0035】
また、急激に上昇するケースに対しては、重みwをつけた回帰式とT1との誤差を最小にする(7)式により、傾きaを算出し、a/T1refの演算から情報量2P2(k)=a/T1refを求める。
【0036】
【数2】
【0037】
なお、重みwとしてガウシアン分布の例を示したが、傾きを求めたい時刻から過去に遡り、遠い過去ほど重みをゼロ(又はゼロに近づける)にし、傾きを求めたい時刻に近いほど重みを大きくできるものであればどのようなもの(例えば、tricube分布など)を用いても構わない。
【0038】
さらに、短期的な変動の出現が大きく変わるケースに対しては、例えば以下の(8)式のような判断ロジック(プログラム例)に、閾値UL(固定値ではなく変動する値)を越えた回数を数えて情報量3P3(k)を求める。
【0039】
【数3】
【0040】
異常判定部17では、上述したように特徴的情報量抽出部16でもとめた情報量1から3に基づいて異常判定を行う。情報量1から3にそれぞれ上限値を設けておき、上記で求めた情報量1から3が対応する対応するそれぞれの上限値を超えたら異常と判定し、警報を出力部18に出力する。特徴的情報量抽出部16で求めた情報量は正規化されており、監視対象によらず普遍的な情報量であるため、全監視対象に対して同一の上限値を設定することが可能であり、メンテナンスにかける労力を大幅に削減することが可能となる。
【0041】
図2で示した異常発生時の形態が異なる3つの事例に対して、本発明を適用した実施例の結果を示す。なお、用いたデータは、回転機の軸受けに取り付けた振動センサから得られた加速度の実効平均値のデータである。
【0042】
図3は、長期傾向成分、中期傾向成分、短期傾向成分へ分離した結果を示す図である。また図4は、抽出した成分から特徴的情報量を抽出した結果を示す図である。緩やかに上昇していく事例に対しては、情報量1により、急激に上昇する事例に対しては、情報量2、短期的な変動の出現が大きく変わる事例に対しては、情報量3により、いずれも早期に検出できていることがわかる。
【0043】
(実施形態2)
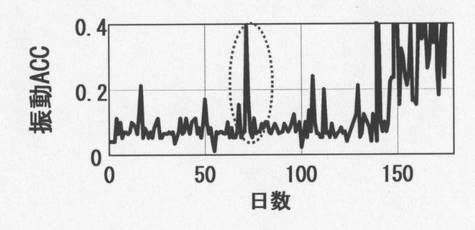
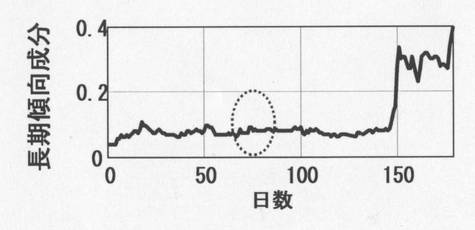
図5は、本実施形態2で異常を早期に検知したい代表的事例を説明する図である。回転機器の軸受部に設置した振動計で計測された加速度の1日毎の実効平均値の時間推移データである。図中の破線で囲んだ単発的な変動部分に注目する。
【0044】
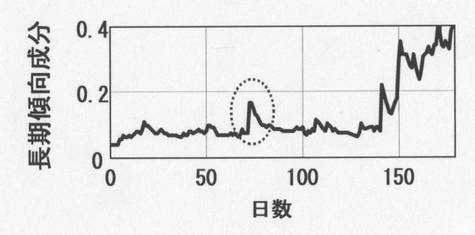
図6は、本実施形態1の処理による長期傾向成分の抽出結果を示す図である。図5のデータに本実施形態1の処理を施し、長期傾向成分を抽出したものであるが、元データに示した単発的な変動の影響が図6の破線のように長期傾向成分に出現してしまっている。
【0045】
このように、単発的な変動に対して、緩やかに上昇するケースを早期に捉えるための情報量である区間増加率(情報量1)や、急激に上昇するケースを早期に捉えるための情報量である瞬間増加率(情報量2)は影響を受け易くなり、誤検知を生じやすくなってしまう。
【0046】
本来は、このような単発的な変動は短期傾向成分として扱うべきであるが、実装の容易性から採用した指数平滑処理の方法では例示したように限界がある。そこで、本実施形態2では、成分抽出の前処理として、事前判定処理の仕方を考案した。この方法では、予め設定する過去区間の平均、標準偏差から仮の短期異常の判定用閾値の逐次推定を行い、その判定用閾値を超えたのち、予め設定された期間以内にレベルが低下し、判定用閾値以下となる場合は仮の短期異常とし、仮の短期異常の場合には、長期傾向成分、中期傾向成分を前回値とする。この方法により、単発的な変動は確実に検知することができ、短期変動成分として抽出することが可能となる。
【0047】
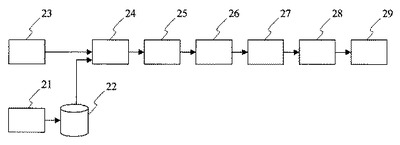
図8は、本実施形態2における異常診断システムの構成例を示す図である。図8中、21はセンサ、22はデータベース、23は初期設定部、24はメモリデータ更新部、25は事前判定部、26は傾向成分分離部、27は特徴的情報量抽出部、28は異常判定部、および29は出力部をそれぞれ表す。本実施形態2は、実施形態1の構成に対して、傾向成分分離部26の前段に事前判定部25が加わった構成となる。
【0048】
まず、各種物理量を測定するセンサ21からの測定データは、データベース22で記憶される。初期設定部23では、後段の処理で用いるパラメータの設定、処理を始めるに当たっての初期条件の設定を行う。
【0049】
次のメモリデータ更新部24では、最新時刻kにおける各種測定データ(振動データなど)をデータベース22から取込み、最も古いデータをメモリから破棄する処理を行う。最新時刻kにおける各種測定データ(振動データなど)をセンサ21からメモリデータ更新部24へ直接ロードしたり、計算に必要なデータ(過去のデータを含む)を毎回、データベースに直接アクセスする方法でも構わないが、監視点数が多い場合には、処理速度が著しく劣化するので、必要データをメモリデータ更新部24にロードしておくことが望ましい。
【0050】
事前判定部25では、予め設定する過去区間の平均、標準偏差から仮の短期異常の判定用閾値の逐次推定を行い、その判定用閾値を超えたら様子見を行うモードに入り、予め設定された期間以内に測定信号レベルが低下し、判定用閾値以下となる場合は仮の短期異常と判定する。ここで、様子見を行うモードとは、一旦、閾値を超えた信号が傾向として上昇しているのか、ノイズ的に一時的なものなのかを見極めるための様子をみるためのモードである。
【0051】
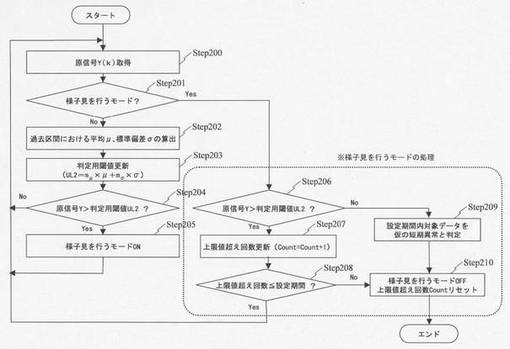
図9は、事前判定部における具体的な処理手順例を示す図である。先ず原信号Y(k)を取得し(Step200)、様子見を行うモードかどうかをチェックする(Step201)。様子見を行うモードでなければ(Step201・No)、Y(k)に対して予め指定した過去区間における平均μ、標準偏差σを求める(Step202)。
【0052】
過去区間の指定は、例えば、現時点から遡って2ヶ月前〜1ヶ月前などと相対的に指定してもよいし、固定的でもよい。次に、求めた平均μ、標準偏差σから次に示す(9)式により判定用閾値UL2を決定する(Step203)。
【0053】
UL2=mμ×μ+mσ×σ・・・・・(9)
なお、パラメータmμやmσは予め指定しておく。
【0054】
次に、原信号Y(k)がUL2を超えたかどうかを判定する(Step204)。原信号Y(k)がUL2を超えた場合には、様子見を行うモードに入るとともに、上限値超え回数(Count)に、例えば1を設定し(Step205)、Step200に戻る。一方、Step201で様子見を行うモードの場合(Step201・Yes)には、判定用閾値UL2との比較を行い、原信号Y(k)が判定用閾値UL2を超えていれば(Step206・Yes)、上限値超え回数を、例えばインクリメントして、更新する(Step207)。
【0055】
なお、様子見を行うモードの場合には、判定用閾値UL2は更新しないで前回値を利用する。そして、上限値超え回数が、予め設定した期間以内(予め設定した原信号の取得回数以内)であれば(Step208・Yes)、Step200に戻る。一方、上限値超え回数が、予め設定した期間(予め設定した原信号の取得回数)を超えていれば(Step208・No)であれば、様子見を行うモードから抜けるとともに上限値超え回数(Count)をゼロにリセットする(Step210)。そして、傾向成分分離部の処理に移る。
【0056】
原信号が、一度、判定用閾値を超えたのち、予め設定した期間以内(予め設定した原信号の取得回数以内)にレベルが低下し、判定用閾値UL2以下になれば(Step206でNo)、その期間の原信号は仮の短期異常と判定(Step209)し、様子見を行うモードから抜けるとともに判定用閾値を超えた回数(上限値超え回数)をゼロにリセットして、傾向成分分離部の処理に移行する(Step210)。なお、この様子見を行うモード中はUL2を更新せず固定する。
【0057】
図8の傾向成分分離部26は、実施形態1と同様に、長期傾向成分T1(t)、中期傾向成分T2(t)、短期傾向成分T3(t)の算出を前述の(1)〜(5)式を用いて行う。なお、先の事前判定部25で「仮の短期異常」と判定されている場合は、指数平滑係数を用いた更新を行わず、以下のように、判定用閾値を越える前の値とする。
【0058】
S1(k)=S1(k-1) ・・・・・(10)
S2(k)=S2(k-1) ・・・・・(11)
次の特徴的情報量抽出部27、異常判定部28および出力部29での処理は、前述の実施形態1における特徴的情報量抽出部16、異常判定部17および出力部18と同様であり、繰り返しとなるので説明を省略する。
【0059】
図7は、本実施形態2の処理による長期傾向成分の抽出結果を示す図である。本実施形態1の処理を適用した図6と比較すると、長期傾向成分に単発性の変動の影響が現れていないことを確認出来る。
【0060】
(実施形態3)
図2に示す時系列グラフを概観すると、矢印位置での検知は一見簡単そうに見えるものの、これを数値化した指標で自動的に検知させようとすると容易なことではない。その理由は、設備対象別に得られる信号レベルが異なること、しかもその対象の数が工場の場合には何千と大量であること、また、正常範囲から異常値への変化が急激なケースもあれば、連続的で明確な境界をつけにくいケースなど種々のパターンがあることなどによる。
【0061】
このような場合、従来の閾値で検知する方法では限界がある。変化の特徴をうまく表現する特徴量を抽出する方法も考えられるものの、変化のパターンは多数あるため、これもすべてのパターンに対して適切な特徴量を用意するのは難しいと言わざるをえない。また、漏れのあるパターンに対しては見逃しの危険も生じてしまう。
【0062】
これに対して、人間の目による判断は、主観的な判断が入るものの、時系列全体を俯瞰して、オートスケーリングをしているため、どんなケースに対しても柔軟に対応できていると考えられる。本実施形態3は、この人間の目による判断機能を、そのまま数値化できないかと考え想到したものである。
【0063】
従来の指標は、現時点のみの情報で異常判定することが多いが、人間が判断する場合には、現時点までに得られた時系列全体を眺めて異常の判断をしている。そこで、本実施形態3では、オートスケーリングとして正規化演算を行うとともに、現時点までに得られた時系列データ全体を考慮に入れるためにデータが得られるたびに正規化を逐次更新する処理を行う。こうして得られる逐次正規化値が、例えば、6σ(σ:標準偏差)という値であれば、多くの人が異常だと判断することに対応するし、2σぐらいならば、人によって異常の判断に差異が生ずることに対応するといった具合に、主観的な判断をσの何倍に上限値を設定するかで客観化することができる。
【0064】
本実施形態3では、実施形態1または実施形態2で算出された長期傾向成分T1(k)、中期傾向成分T2(k)、短期傾向成分T3(k)のうち、少なくとも1つの傾向成分(以下では傾向成分の値をT(k)と記す)を入力し、まず始めに、得られた傾向成分の値Tに対して、平均値、標準偏差を更新する。ただし、過去のトレンド成分の値が保存されていれば、更新式を用いずとも直接計算することができる。
【0065】
次に、求めた平均値と標準偏差を用いて、逐次正規化の処理を行う。そして、求めた逐次正規化値が、予め設定した上限値を超えたら異常と判断することによってして異常検知することができる。上記上限値は、正規化したデータに対するものなので、大量にある監視対象に対して個別に設定する必要はないといった利点がある。
【0066】
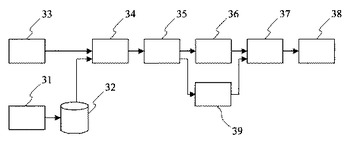
図10は、本実施形態3における異常診断システムの構成例を示す図である。図10中、31はセンサ、32はデータベース、33は初期設定部、34はメモリデータ更新部、35は傾向成分分離部、36は逐次正規化値算出部、37は異常判定部、38は出力部、および39は特徴的情報量抽出部をそれぞれ表す。つまり本実施形態3は、実施形態1に逐次正規化値算出部36を加えた構成である。
【0067】
ここで、センサ31、データベース32、初期設定部33、メモリデータ更新部34、傾向成分分離部35、特徴的情報量抽出部39の処理は、実施形態1のセンサ11、データベース12、初期設定部13、メモリデータ更新部14、傾向成分分離部15、特徴的情報量抽出部16の処理と同じであるので説明は省略し、逐次正規化値算出部36、異常判定部37についてのみ説明する。逐次正規化値算出部36では、得られた傾向成分の値T(k)各々に対して、平均値、標準偏差を算出し、算出した平均値、標準偏差を用いて逐次正規化値を算出する。
【0068】
先ず、平均値、標準偏差は、以下に示す(13)、(14)式でそれぞれ求める。
【0069】
【数4】
【0070】
【数5】
【0071】
但し、T(k):時刻kにおける傾向成分の値
μ(k):時刻kまでの傾向成分の平均値
σ(k):時刻kまでの傾向成分の標準偏差
なお、過去の傾向成分の値が保存されていれば、上記の更新式を用いずとも直接計算することができる。
【0072】
次に、求めた平均値μ(k)と標準偏差σ(k)を用いて、逐次正規化を以下の(15)式に基づき行い、逐次正規化値ND(k)を算出する。
【0073】
【数6】
【0074】
異常判定部37では、異常判定部17の特徴的情報量1から3値に基く異常判定処理に加えて、算出した逐次正規化値ND(k)が予め設けておいた上限値を超えたら異常と判定し、警報を出力部38に出力する。逐次正規化値算出部36で算出した逐次正規化値ND(k)は監視対象によらず普遍的な情報量であるため、全監視対象に対して同一の上限値を設定することができ、メンテナンスにかける労力を大幅に削減することが可能となる。なお、実施形態2の構成に、逐次正規化値算出部36を加えた構成としてもよい。
【0075】
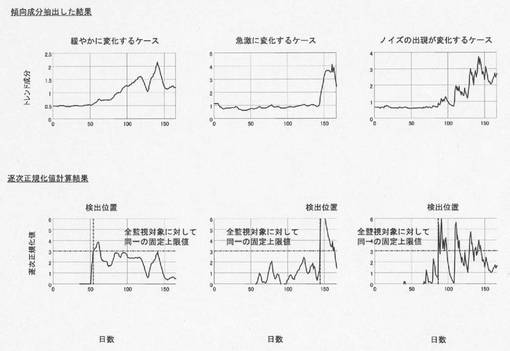
図11は、異常発生時の形態が異なる事例に対し本実施形態3を適用した結果の一例を示す図である。図2に示した同じデータ(回転機器の軸受部に設置した振動計で計測された加速度の実効値の時間推移データであり、(a)は緩やかに変化するケース、(b)は急激に変化するケース、および(c)はノイズの出現が変化するケース)を用いて、先ず図11(a)〜(c)に長期傾向成分を抽出した結果とともに、対応する逐次正規化値の計算結果を(A)〜(C)にそれぞれ示している。
【0076】
そして、逐次正規化値の計算結果には、全監視対象に対して同一の固定上限値を適用した場合に異常と判断される異常検出位置も示している。図2に「予知したい時点」として図中に矢印で示したタイミングと比較して、いずれも漏れなく確実に検出できていることが判り、本実施形態3の有効性が確認できる。
【符号の説明】
【0077】
11 センサ
12 データベース
13 初期設定部
14 メモリデータ更新部
15 傾向成分分離部
16 特徴的情報量抽出部
17 異常判定部
18 出力部
21 センサ
22 データベース
23 初期設定部
24 メモリデータ更新部
25 事前判定部
26 傾向成分分離部
27 特徴的情報量抽出部
28 異常判定部
29 出力部
31 センサ
32 データベース
33 初期設定部
34 メモリデータ更新部
35 傾向成分分離部
36 逐次正規化値算出部
37 異常判定部
38 出力部
39 特徴的情報量抽出部
【技術分野】
【0001】
本発明は、機械設備の異常診断技術に関し、特に回転機械から得られる振動データを解析することにより初期の微小な異常を早期に検知する、機械設備における異常診断システムに関するものである。
【背景技術】
【0002】
回転機械の稼動状態の良否を判定する従来技術としては、次のような技術が知られている。先ず第1の技術として、回転機器に発生する振動変位、振動速度、振動加速度等を計測し、その計測値から、振動の最大値や実効値などを求め、それらの値を基準値と比較することにより、正常、注意、危険の判定を行う技術を挙げることができる。
【0003】
次に上記技術を発展させた第2の技術として、例えば特許文献1で開示された技術がある。これは上記基準値を回転機器の状態等により自動更新する方法である。
【0004】
さらに第3の技術として、例えば特許文献2で開示された技術がある。これは、周波数解析により、異常状態に起因する基本周波数成分とその自然数倍の周波数成分の大きさを比較する技術である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平1−270623号公報
【特許文献2】特開2003−232674号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した背景技術には次のような問題がある。先ず第1の技術には、振動を計測するセンサの取付け対象設備および取付け位置、さらに計測時における機械設備の状態等により、振動レベルやノイズレベルが変わり、適切な基準値を与えるのが難しいという問題がある。
【0007】
また第2の技術は、上記問題点を解決するために考案された技術であるが、緩やかに振動レベルが上昇していく場合や、ノイズの出現の仕方に変化がある場合などには、適切な基準値が得られにくいという問題がある。
【0008】
さらに第3の技術には、周波数解析を行うため、計算負荷が高く、特に監視対象が数千点に及ぶような巨大なシステムで実現するにはコストが非常に高くなるという問題がある。
【0009】
本発明は、上記事情に鑑みてなされたもので、安価な導入、メンテナンスにかかる労力の大幅削減、かつ、初期の微小な異常を早期に漏れなく検知ができる、機械設備における異常診断システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の請求項1に係る発明は、機械設備に設置したセンサで測定した信号を分析することにより、機械設備の異常を検知する機械設備における異常診断システムであって、測定信号から2つ以上の期間傾向成分に分離する傾向成分分離部と、該傾向成分分離部で分離した各期間傾向成分から、異常発生時の信号のパターンを特徴づける複数の特徴的な情報量を抽出する特徴的情報量抽出部と、該特徴的情報量抽出部で抽出された複数の特徴的な情報量に基づいて機械設備の異常を検知する異常判定部とを備えることを特徴とする機械設備における異常診断システムである。
【0011】
また本発明の請求項2に係る発明は、請求項1に記載の機械設備における異常診断システムにおいて、前記複数の特徴的な情報量は、長期傾向成分に対して、所定期間で積分を行い、得られる積分値を正規化することにより求めた、所定期間における正規化された増加率を示す情報量1と、前記長期傾向成分の傾きを求め、得られる傾きを正規化することにより求めた、評価対象時刻における瞬間的な正規化された増加率を示す情報量2と、短期傾向成分に対して、所定期間における閾値以上の変動の個数をカウントすることによって得られるカウント数を示す情報量3とであることを特徴とする機械設備における異常診断システムである。
【0012】
また本発明の請求項3に係る発明は、請求項1または2に記載の機械設備における異常診断システムにおいて、前記期間傾向成分に分離するにあたっては、測定信号に対して、異なる2つの指数平滑係数を用いた指数平滑処理を行うことにより分離することを特徴とする機械設備における異常診断システムである。
【0013】
また本発明の請求項4に係る発明は、請求項3に記載の機械設備における異常診断システムにおいて、前記傾向成分分離部の前段に、予め設定する過去区間の測定信号の平均、標準偏差から逐次推定を行って、仮の短期異常の判定用閾値を求め、該判定用閾値を測定信号が超えたのち、予め設定した期間以内に測定信号のレベルが低下し、前記上限値以下となる場合は仮の短期異常と判定する事前判定部を備え、該事前判定部で仮の短期異常と判定した場合は、前記傾向成分分離部において前記指数平滑処理を行わず、各期間傾向成分を前記判定用閾値を越える前の分値とすることを特徴とする機械設備における異常診断システムである。
【0014】
さらに本発明の請求項5に係る発明は、請求項1〜4のいずれか1項に記載の機械設備における異常診断システムにおいて、前記複数の特徴的な情報量から、平均値および標準偏差を逐次求め、該平均値および標準偏差を用いて逐次正規化値を算出する、逐次正規化値算出部と、該逐次正規化値算出部で算出された逐次正規化値に基づいて機械設備の異常を検知する異常判定部とを備えることを特徴とする機械設備における異常診断システムである。
【発明の効果】
【0015】
本発明は、簡単なロジックを用いているため、既存のシステムに安価に導入でき、かつ、初期の微小な異常を早期に漏れなく検知できるようになる。また、異常を検知するための特徴的な情報量が変化率等の相対値であるため、大量にある監視対象に対して同一の上限値を設定することができ、メンテナンスにかける労力を大幅に削減することが可能となる。
【図面の簡単な説明】
【0016】
【図1】本実施形態1における異常診断システムの構成例を示す図である。
【図2】本実施形態1で異常を早期に検知したい代表的事例を説明する図である。
【図3】長期傾向成分、中期傾向成分、短期傾向成分へ分離した結果を示す図である。
【図4】抽出した成分から特徴的情報量を抽出した結果を示す図である。
【図5】本実施形態2で異常を早期に検知したい代表的事例を説明する図である。
【図6】本実施形態1の処理による長期傾向成分の抽出結果を示す図である。
【図7】本実施形態2の処理による長期傾向成分の抽出結果を示す図である。
【図8】本実施形態2における異常診断システムの構成例を示す図である。
【図9】事前判定部における具体的な処理手順例を示す図である。
【図10】本実施形態3における異常診断システムの構成例を示す図である。
【図11】異常発生時の形態が異なる事例に対し本実施形態3を適用した結果の一例を示す図である。
【発明を実施するための形態】
【0017】
(実施形態1)
以下、図面および数式を参照しながら、本発明を具体的に説明してゆく。図2は、本実施形態1で異常を早期に検知したい代表的事例を説明する図である。この図で示す各データは、回転機器の軸受部に設置した振動計で計測された加速度の実効値の時間推移データである。
【0018】
従来の異常診断システムでは、注意レベル、危険レベルの2つの上限値が設定されおり、これら上限値を超えると警報が出力される。しかし、図2に示した代表例は、いずれも最終的には、図中にそれぞれ矢印で示した時点で機器損傷に至った事例であり、さらに機器損傷に至る前にある、異常予知したい時点として図中に矢印で示したタイミングで異常の検知ができていれば、潤滑油や部品の交換をすることにより、機器の損傷を避けることができた事例である。
【0019】
様々なデータを解析した結果、機器損傷に至るまでには、図で示すように、異常発生の形態は、緩やかに上昇していく場合(a)、急激に上昇する場合(b)、短期的な変動の出現が大きく変わる場合(c)と、大きく3つの形態に分類できることに気づいた。
【0020】
そこで、本発明では、これら3つの形態にあった異常の早期検知方法を考案した。始めに、振動データを長期傾向成分、中期傾向成分、短期傾向成分へ分離する。なお、ここで、長期、中期および短期と称しているが、絶対的な期間の長さを表すものではなく、あくまでも対象とするデータ区間に対する相対的な長短を表すものである。
【0021】
成分分離は、長期傾向成分に対しては、中期的なうねりや短期的な変動が除去されるように、逆に、短期傾向成分に対しては、長期的なトレンドや中期的なうねりが除去されるように分離する。これにより3つのパターンを特徴的に示す情報量を抽出しやすくする。
【0022】
次に、緩やかに上昇していくケースに対しては、中期的うねりや短期的変動が除去された長期傾向成分に対して、所定の一定期間で積分を行い、得られた積分値を正規化することにより求めた一定期間における正規化された増加率により特徴づけることができる。これを情報量1とする。
【0023】
急激に上昇するケースに対しては、長期傾向成分の傾きを求め、得られた傾きを正規化することにより求めた評価対象時刻における瞬間的な正規化された増加率により特徴づけることができる。これを情報量2とする。傾きの算出としては、単純に前回値との差分をとる方法も考えられるが、一般に変動が大きく不安定である。そこで、傾きを求めたい時刻から過去に遡り、遠い過去ほど重みをゼロにし、傾きを求めたい時刻に近いほど重みを大きくつけた後、回帰を行う、いわゆる局所重み回帰により、安定的な傾きを算出する。
【0024】
短期的な変動の出現が大きく変わるケースに対しては、長期的なトレンドや中期的なうねりが除去された短期傾向成分に対して、所定の一定期間における一定以上の変動の個数をカウントし、得られたカウント数により特徴づけることができる。これを情報量3とする。短期傾向成分は長期的なトレンドや中期的なうねりが除去されているので、このような処理を正確に、かつ、簡単に行うことができるようになる。
【0025】
図1は、本実施形態1における異常診断システムの構成例を示す図である。図1中、11はセンサ、12はデータベース、13は初期設定部、14はメモリデータ更新部、15は傾向成分分離部、16は特徴的情報量抽出部、17は異常判定部、および18は出力部をそれぞれ表す。
【0026】
まず、各種物理量を測定するセンサ11からの測定データは、データベース12で記憶される。初期設定部13では、後段の処理で用いるパラメータの設定、処理を始めるに当たっての初期条件の設定を行う。
【0027】
次のメモリデータ更新部14では、最新時刻kにおける各種測定データ(振動データなど)をデータベース12から取込み、最も古いデータをメモリから破棄する処理を行う。最新時刻kにおける各種測定データ(振動データなど)をセンサ11からメモリデータ更新部14へ直接ロードしたり、計算に必要なデータ(過去のデータを含む)を毎回、データベースに直接アクセスする方法でも構わないが、監視点数が多い場合、処理速度が著しく劣化するので、必要データをメモリデータ更新部14にロードしておくことが望ましい。
【0028】
傾向成分分離部15では、メモリデータ更新部14にロードされた最新時刻kにおける各種測定データ、およびデータベース12に記憶されている現時刻k以前の過去のデータを用いて、長期(長期的なトレンド)、中期(中期的なうねり)、短期(短期的な変動)への成分分離を行う。成分の分離には、異なる2つの指数平滑係数を用いた指数平滑処理により求める。具体的には、機械設備から得られた時刻kにおける信号Y(k)と時刻k-1における信号Y(k-1)から、予め設定した係数α1,α2を用いて、以下に示す(1)、(2)式のように逐次的に求める。
【0029】
S1(k)=S1(k-1)+α1(Y(k-1) - S1(k-1) ) ・・・・・(1)
S2(k)=S2(k-1)+α2(Y(k-1) - S2(k-1) ) ・・・・・(2)
ここで、kは2からスタートする整数とし、初期値として、S1(1)=Y(1)およびS2(1)=Y(1)とする。ここで、(1)式は、信号から短期傾向成分(短期的な変動)と中期傾向成分(中期的なうねり)を除去するようにした式に相当し、(2)式は、信号から短期傾向成分を除去するようにした式に相当する。
【0030】
なお、係数α1,α2の値については、ステップ応答をシミュレートすることで求めることができる。例えば、データが一日に1回の頻度で編集される場合、α1=0.2、α2=0.9とすると、長期傾向成分については、値が最終値の63%に達する期間(時定数)が5日、最終値の99%に達する期間が約20日であり、中期傾向成分については、値が最終値の63%に達する期間(時定数)が1日未満、最終値の99%に達する期間が2〜3日となる。なお、期間は、対象により適宜設定すれば良く、α1、α2の値を期間に応じて決めればよい。
【0031】
得られたS1(k),S2(k)から時刻kにおける長期傾向成分T1(k)、中期傾向成分T2(k)、および短期傾向成分T3(k)を、それぞれ(3)〜(5)式のように求める。
【0032】
T1(k)=S1(k) ・・・・・(3)
T2(k)=S2(k)-S1(k) ・・・・・(4)
T3(k)=Y(k)-S2(k) ・・・・・(5)
次に特徴的情報量抽出部16では、異常出現時の変化パターン情報量を抽出する。前述のように、様々なデータを解析した結果、異常発生の形態は、大きく3つに分類されることがわかった。1つめは緩やかに上昇していく場合、2つめは急激に上昇する場合、3つめは短期的な変動の出現が大きく変わる場合である。そこで、これらの形態にあった特徴的な情報量を抽出する。
【0033】
前述の傾向成分分離部15で、異なる3つの期間の短期、中期、長期の各々の傾向成分を求めたが、特徴的情報量抽出部16では、そのうちの期間が離れている短期傾向成分と長期傾向成分の2つを用いて特徴的な情報量を算出する。緩やかに上昇していくケースに対しては、以下の(6)式により算出し情報量1P1(k)とする。
【0034】
【数1】
【0035】
また、急激に上昇するケースに対しては、重みwをつけた回帰式とT1との誤差を最小にする(7)式により、傾きaを算出し、a/T1refの演算から情報量2P2(k)=a/T1refを求める。
【0036】
【数2】
【0037】
なお、重みwとしてガウシアン分布の例を示したが、傾きを求めたい時刻から過去に遡り、遠い過去ほど重みをゼロ(又はゼロに近づける)にし、傾きを求めたい時刻に近いほど重みを大きくできるものであればどのようなもの(例えば、tricube分布など)を用いても構わない。
【0038】
さらに、短期的な変動の出現が大きく変わるケースに対しては、例えば以下の(8)式のような判断ロジック(プログラム例)に、閾値UL(固定値ではなく変動する値)を越えた回数を数えて情報量3P3(k)を求める。
【0039】
【数3】
【0040】
異常判定部17では、上述したように特徴的情報量抽出部16でもとめた情報量1から3に基づいて異常判定を行う。情報量1から3にそれぞれ上限値を設けておき、上記で求めた情報量1から3が対応する対応するそれぞれの上限値を超えたら異常と判定し、警報を出力部18に出力する。特徴的情報量抽出部16で求めた情報量は正規化されており、監視対象によらず普遍的な情報量であるため、全監視対象に対して同一の上限値を設定することが可能であり、メンテナンスにかける労力を大幅に削減することが可能となる。
【0041】
図2で示した異常発生時の形態が異なる3つの事例に対して、本発明を適用した実施例の結果を示す。なお、用いたデータは、回転機の軸受けに取り付けた振動センサから得られた加速度の実効平均値のデータである。
【0042】
図3は、長期傾向成分、中期傾向成分、短期傾向成分へ分離した結果を示す図である。また図4は、抽出した成分から特徴的情報量を抽出した結果を示す図である。緩やかに上昇していく事例に対しては、情報量1により、急激に上昇する事例に対しては、情報量2、短期的な変動の出現が大きく変わる事例に対しては、情報量3により、いずれも早期に検出できていることがわかる。
【0043】
(実施形態2)
図5は、本実施形態2で異常を早期に検知したい代表的事例を説明する図である。回転機器の軸受部に設置した振動計で計測された加速度の1日毎の実効平均値の時間推移データである。図中の破線で囲んだ単発的な変動部分に注目する。
【0044】
図6は、本実施形態1の処理による長期傾向成分の抽出結果を示す図である。図5のデータに本実施形態1の処理を施し、長期傾向成分を抽出したものであるが、元データに示した単発的な変動の影響が図6の破線のように長期傾向成分に出現してしまっている。
【0045】
このように、単発的な変動に対して、緩やかに上昇するケースを早期に捉えるための情報量である区間増加率(情報量1)や、急激に上昇するケースを早期に捉えるための情報量である瞬間増加率(情報量2)は影響を受け易くなり、誤検知を生じやすくなってしまう。
【0046】
本来は、このような単発的な変動は短期傾向成分として扱うべきであるが、実装の容易性から採用した指数平滑処理の方法では例示したように限界がある。そこで、本実施形態2では、成分抽出の前処理として、事前判定処理の仕方を考案した。この方法では、予め設定する過去区間の平均、標準偏差から仮の短期異常の判定用閾値の逐次推定を行い、その判定用閾値を超えたのち、予め設定された期間以内にレベルが低下し、判定用閾値以下となる場合は仮の短期異常とし、仮の短期異常の場合には、長期傾向成分、中期傾向成分を前回値とする。この方法により、単発的な変動は確実に検知することができ、短期変動成分として抽出することが可能となる。
【0047】
図8は、本実施形態2における異常診断システムの構成例を示す図である。図8中、21はセンサ、22はデータベース、23は初期設定部、24はメモリデータ更新部、25は事前判定部、26は傾向成分分離部、27は特徴的情報量抽出部、28は異常判定部、および29は出力部をそれぞれ表す。本実施形態2は、実施形態1の構成に対して、傾向成分分離部26の前段に事前判定部25が加わった構成となる。
【0048】
まず、各種物理量を測定するセンサ21からの測定データは、データベース22で記憶される。初期設定部23では、後段の処理で用いるパラメータの設定、処理を始めるに当たっての初期条件の設定を行う。
【0049】
次のメモリデータ更新部24では、最新時刻kにおける各種測定データ(振動データなど)をデータベース22から取込み、最も古いデータをメモリから破棄する処理を行う。最新時刻kにおける各種測定データ(振動データなど)をセンサ21からメモリデータ更新部24へ直接ロードしたり、計算に必要なデータ(過去のデータを含む)を毎回、データベースに直接アクセスする方法でも構わないが、監視点数が多い場合には、処理速度が著しく劣化するので、必要データをメモリデータ更新部24にロードしておくことが望ましい。
【0050】
事前判定部25では、予め設定する過去区間の平均、標準偏差から仮の短期異常の判定用閾値の逐次推定を行い、その判定用閾値を超えたら様子見を行うモードに入り、予め設定された期間以内に測定信号レベルが低下し、判定用閾値以下となる場合は仮の短期異常と判定する。ここで、様子見を行うモードとは、一旦、閾値を超えた信号が傾向として上昇しているのか、ノイズ的に一時的なものなのかを見極めるための様子をみるためのモードである。
【0051】
図9は、事前判定部における具体的な処理手順例を示す図である。先ず原信号Y(k)を取得し(Step200)、様子見を行うモードかどうかをチェックする(Step201)。様子見を行うモードでなければ(Step201・No)、Y(k)に対して予め指定した過去区間における平均μ、標準偏差σを求める(Step202)。
【0052】
過去区間の指定は、例えば、現時点から遡って2ヶ月前〜1ヶ月前などと相対的に指定してもよいし、固定的でもよい。次に、求めた平均μ、標準偏差σから次に示す(9)式により判定用閾値UL2を決定する(Step203)。
【0053】
UL2=mμ×μ+mσ×σ・・・・・(9)
なお、パラメータmμやmσは予め指定しておく。
【0054】
次に、原信号Y(k)がUL2を超えたかどうかを判定する(Step204)。原信号Y(k)がUL2を超えた場合には、様子見を行うモードに入るとともに、上限値超え回数(Count)に、例えば1を設定し(Step205)、Step200に戻る。一方、Step201で様子見を行うモードの場合(Step201・Yes)には、判定用閾値UL2との比較を行い、原信号Y(k)が判定用閾値UL2を超えていれば(Step206・Yes)、上限値超え回数を、例えばインクリメントして、更新する(Step207)。
【0055】
なお、様子見を行うモードの場合には、判定用閾値UL2は更新しないで前回値を利用する。そして、上限値超え回数が、予め設定した期間以内(予め設定した原信号の取得回数以内)であれば(Step208・Yes)、Step200に戻る。一方、上限値超え回数が、予め設定した期間(予め設定した原信号の取得回数)を超えていれば(Step208・No)であれば、様子見を行うモードから抜けるとともに上限値超え回数(Count)をゼロにリセットする(Step210)。そして、傾向成分分離部の処理に移る。
【0056】
原信号が、一度、判定用閾値を超えたのち、予め設定した期間以内(予め設定した原信号の取得回数以内)にレベルが低下し、判定用閾値UL2以下になれば(Step206でNo)、その期間の原信号は仮の短期異常と判定(Step209)し、様子見を行うモードから抜けるとともに判定用閾値を超えた回数(上限値超え回数)をゼロにリセットして、傾向成分分離部の処理に移行する(Step210)。なお、この様子見を行うモード中はUL2を更新せず固定する。
【0057】
図8の傾向成分分離部26は、実施形態1と同様に、長期傾向成分T1(t)、中期傾向成分T2(t)、短期傾向成分T3(t)の算出を前述の(1)〜(5)式を用いて行う。なお、先の事前判定部25で「仮の短期異常」と判定されている場合は、指数平滑係数を用いた更新を行わず、以下のように、判定用閾値を越える前の値とする。
【0058】
S1(k)=S1(k-1) ・・・・・(10)
S2(k)=S2(k-1) ・・・・・(11)
次の特徴的情報量抽出部27、異常判定部28および出力部29での処理は、前述の実施形態1における特徴的情報量抽出部16、異常判定部17および出力部18と同様であり、繰り返しとなるので説明を省略する。
【0059】
図7は、本実施形態2の処理による長期傾向成分の抽出結果を示す図である。本実施形態1の処理を適用した図6と比較すると、長期傾向成分に単発性の変動の影響が現れていないことを確認出来る。
【0060】
(実施形態3)
図2に示す時系列グラフを概観すると、矢印位置での検知は一見簡単そうに見えるものの、これを数値化した指標で自動的に検知させようとすると容易なことではない。その理由は、設備対象別に得られる信号レベルが異なること、しかもその対象の数が工場の場合には何千と大量であること、また、正常範囲から異常値への変化が急激なケースもあれば、連続的で明確な境界をつけにくいケースなど種々のパターンがあることなどによる。
【0061】
このような場合、従来の閾値で検知する方法では限界がある。変化の特徴をうまく表現する特徴量を抽出する方法も考えられるものの、変化のパターンは多数あるため、これもすべてのパターンに対して適切な特徴量を用意するのは難しいと言わざるをえない。また、漏れのあるパターンに対しては見逃しの危険も生じてしまう。
【0062】
これに対して、人間の目による判断は、主観的な判断が入るものの、時系列全体を俯瞰して、オートスケーリングをしているため、どんなケースに対しても柔軟に対応できていると考えられる。本実施形態3は、この人間の目による判断機能を、そのまま数値化できないかと考え想到したものである。
【0063】
従来の指標は、現時点のみの情報で異常判定することが多いが、人間が判断する場合には、現時点までに得られた時系列全体を眺めて異常の判断をしている。そこで、本実施形態3では、オートスケーリングとして正規化演算を行うとともに、現時点までに得られた時系列データ全体を考慮に入れるためにデータが得られるたびに正規化を逐次更新する処理を行う。こうして得られる逐次正規化値が、例えば、6σ(σ:標準偏差)という値であれば、多くの人が異常だと判断することに対応するし、2σぐらいならば、人によって異常の判断に差異が生ずることに対応するといった具合に、主観的な判断をσの何倍に上限値を設定するかで客観化することができる。
【0064】
本実施形態3では、実施形態1または実施形態2で算出された長期傾向成分T1(k)、中期傾向成分T2(k)、短期傾向成分T3(k)のうち、少なくとも1つの傾向成分(以下では傾向成分の値をT(k)と記す)を入力し、まず始めに、得られた傾向成分の値Tに対して、平均値、標準偏差を更新する。ただし、過去のトレンド成分の値が保存されていれば、更新式を用いずとも直接計算することができる。
【0065】
次に、求めた平均値と標準偏差を用いて、逐次正規化の処理を行う。そして、求めた逐次正規化値が、予め設定した上限値を超えたら異常と判断することによってして異常検知することができる。上記上限値は、正規化したデータに対するものなので、大量にある監視対象に対して個別に設定する必要はないといった利点がある。
【0066】
図10は、本実施形態3における異常診断システムの構成例を示す図である。図10中、31はセンサ、32はデータベース、33は初期設定部、34はメモリデータ更新部、35は傾向成分分離部、36は逐次正規化値算出部、37は異常判定部、38は出力部、および39は特徴的情報量抽出部をそれぞれ表す。つまり本実施形態3は、実施形態1に逐次正規化値算出部36を加えた構成である。
【0067】
ここで、センサ31、データベース32、初期設定部33、メモリデータ更新部34、傾向成分分離部35、特徴的情報量抽出部39の処理は、実施形態1のセンサ11、データベース12、初期設定部13、メモリデータ更新部14、傾向成分分離部15、特徴的情報量抽出部16の処理と同じであるので説明は省略し、逐次正規化値算出部36、異常判定部37についてのみ説明する。逐次正規化値算出部36では、得られた傾向成分の値T(k)各々に対して、平均値、標準偏差を算出し、算出した平均値、標準偏差を用いて逐次正規化値を算出する。
【0068】
先ず、平均値、標準偏差は、以下に示す(13)、(14)式でそれぞれ求める。
【0069】
【数4】
【0070】
【数5】
【0071】
但し、T(k):時刻kにおける傾向成分の値
μ(k):時刻kまでの傾向成分の平均値
σ(k):時刻kまでの傾向成分の標準偏差
なお、過去の傾向成分の値が保存されていれば、上記の更新式を用いずとも直接計算することができる。
【0072】
次に、求めた平均値μ(k)と標準偏差σ(k)を用いて、逐次正規化を以下の(15)式に基づき行い、逐次正規化値ND(k)を算出する。
【0073】
【数6】
【0074】
異常判定部37では、異常判定部17の特徴的情報量1から3値に基く異常判定処理に加えて、算出した逐次正規化値ND(k)が予め設けておいた上限値を超えたら異常と判定し、警報を出力部38に出力する。逐次正規化値算出部36で算出した逐次正規化値ND(k)は監視対象によらず普遍的な情報量であるため、全監視対象に対して同一の上限値を設定することができ、メンテナンスにかける労力を大幅に削減することが可能となる。なお、実施形態2の構成に、逐次正規化値算出部36を加えた構成としてもよい。
【0075】
図11は、異常発生時の形態が異なる事例に対し本実施形態3を適用した結果の一例を示す図である。図2に示した同じデータ(回転機器の軸受部に設置した振動計で計測された加速度の実効値の時間推移データであり、(a)は緩やかに変化するケース、(b)は急激に変化するケース、および(c)はノイズの出現が変化するケース)を用いて、先ず図11(a)〜(c)に長期傾向成分を抽出した結果とともに、対応する逐次正規化値の計算結果を(A)〜(C)にそれぞれ示している。
【0076】
そして、逐次正規化値の計算結果には、全監視対象に対して同一の固定上限値を適用した場合に異常と判断される異常検出位置も示している。図2に「予知したい時点」として図中に矢印で示したタイミングと比較して、いずれも漏れなく確実に検出できていることが判り、本実施形態3の有効性が確認できる。
【符号の説明】
【0077】
11 センサ
12 データベース
13 初期設定部
14 メモリデータ更新部
15 傾向成分分離部
16 特徴的情報量抽出部
17 異常判定部
18 出力部
21 センサ
22 データベース
23 初期設定部
24 メモリデータ更新部
25 事前判定部
26 傾向成分分離部
27 特徴的情報量抽出部
28 異常判定部
29 出力部
31 センサ
32 データベース
33 初期設定部
34 メモリデータ更新部
35 傾向成分分離部
36 逐次正規化値算出部
37 異常判定部
38 出力部
39 特徴的情報量抽出部
【特許請求の範囲】
【請求項1】
機械設備に設置したセンサで測定した信号を分析することにより、機械設備の異常を検知する機械設備における異常診断システムであって、
測定信号から2つ以上の期間傾向成分に分離する傾向成分分離部と、
該傾向成分分離部で分離した各期間傾向成分から、異常発生時の信号のパターンを特徴づける複数の特徴的な情報量を抽出する特徴的情報量抽出部と、
該特徴的情報量抽出部で抽出された複数の特徴的な情報量に基づいて機械設備の異常を検知する異常判定部とを備えることを特徴とする機械設備における異常診断システム。
【請求項2】
請求項1に記載の機械設備における異常診断システムにおいて、
前記複数の特徴的な情報量は、
長期傾向成分に対して、所定期間で積分を行い、得られる積分値を正規化することにより求めた、所定期間における正規化された増加率を示す情報量1と、
前記長期傾向成分の傾きを求め、得られる傾きを正規化することにより求めた、評価対象時刻における瞬間的な正規化された増加率を示す情報量2と、
短期傾向成分に対して、所定期間における閾値以上の変動の個数をカウントすることによって得られるカウント数を示す情報量3とであることを特徴とする機械設備における異常診断システム。
【請求項3】
請求項1または2に記載の機械設備における異常診断システムにおいて、
前記期間傾向成分に分離するにあたっては、
測定信号に対して、異なる2つの指数平滑係数を用いた指数平滑処理を行うことにより分離することを特徴とする機械設備における異常診断システム。
【請求項4】
請求項3に記載の機械設備における異常診断システムにおいて、
前記傾向成分分離部の前段に、
予め設定する過去区間の測定信号の平均、標準偏差から逐次推定を行って、仮の短期異常の判定用閾値を求め、該判定用閾値を測定信号が超えたのち、予め設定した期間以内に測定信号のレベルが低下し、前記判定用閾値以下となる場合は仮の短期異常と判定する事前判定部を備え、該事前判定部で仮の短期異常と判定した場合は、前記傾向成分分離部において前記指数平滑処理を行わず、各期間傾向成分を前記判定用閾値を越える前の値とすることを特徴とする機械設備における異常診断システム。
【請求項5】
請求項1〜4のいずれか1項に記載の機械設備における異常診断システムにおいて、
前記複数の特徴的な情報量から、平均値および標準偏差を逐次求め、該平均値および標準偏差を用いて逐次正規化値を算出する、逐次正規化値算出部と、
該逐次正規化値算出部で算出された逐次正規化値に基づいて機械設備の異常を検知する異常判定部とを備えることを特徴とする機械設備における異常診断システム。
【請求項1】
機械設備に設置したセンサで測定した信号を分析することにより、機械設備の異常を検知する機械設備における異常診断システムであって、
測定信号から2つ以上の期間傾向成分に分離する傾向成分分離部と、
該傾向成分分離部で分離した各期間傾向成分から、異常発生時の信号のパターンを特徴づける複数の特徴的な情報量を抽出する特徴的情報量抽出部と、
該特徴的情報量抽出部で抽出された複数の特徴的な情報量に基づいて機械設備の異常を検知する異常判定部とを備えることを特徴とする機械設備における異常診断システム。
【請求項2】
請求項1に記載の機械設備における異常診断システムにおいて、
前記複数の特徴的な情報量は、
長期傾向成分に対して、所定期間で積分を行い、得られる積分値を正規化することにより求めた、所定期間における正規化された増加率を示す情報量1と、
前記長期傾向成分の傾きを求め、得られる傾きを正規化することにより求めた、評価対象時刻における瞬間的な正規化された増加率を示す情報量2と、
短期傾向成分に対して、所定期間における閾値以上の変動の個数をカウントすることによって得られるカウント数を示す情報量3とであることを特徴とする機械設備における異常診断システム。
【請求項3】
請求項1または2に記載の機械設備における異常診断システムにおいて、
前記期間傾向成分に分離するにあたっては、
測定信号に対して、異なる2つの指数平滑係数を用いた指数平滑処理を行うことにより分離することを特徴とする機械設備における異常診断システム。
【請求項4】
請求項3に記載の機械設備における異常診断システムにおいて、
前記傾向成分分離部の前段に、
予め設定する過去区間の測定信号の平均、標準偏差から逐次推定を行って、仮の短期異常の判定用閾値を求め、該判定用閾値を測定信号が超えたのち、予め設定した期間以内に測定信号のレベルが低下し、前記判定用閾値以下となる場合は仮の短期異常と判定する事前判定部を備え、該事前判定部で仮の短期異常と判定した場合は、前記傾向成分分離部において前記指数平滑処理を行わず、各期間傾向成分を前記判定用閾値を越える前の値とすることを特徴とする機械設備における異常診断システム。
【請求項5】
請求項1〜4のいずれか1項に記載の機械設備における異常診断システムにおいて、
前記複数の特徴的な情報量から、平均値および標準偏差を逐次求め、該平均値および標準偏差を用いて逐次正規化値を算出する、逐次正規化値算出部と、
該逐次正規化値算出部で算出された逐次正規化値に基づいて機械設備の異常を検知する異常判定部とを備えることを特徴とする機械設備における異常診断システム。
【図1】

【図8】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図11】
【図8】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図11】
【公開番号】特開2010−19830(P2010−19830A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2009−50091(P2009−50091)
【出願日】平成21年3月4日(2009.3.4)
【出願人】(000001258)JFEスチール株式会社 (8,589)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成21年3月4日(2009.3.4)
【出願人】(000001258)JFEスチール株式会社 (8,589)
【Fターム(参考)】
[ Back to top ]