
自動検体処理装置
【課題】自動検体処理装置分野において、装置を肥大化させずに、逐次処理を実施でき、かつ搬送経路の複雑化や装置の肥大化を回避する技術を提供する。
【解決手段】少なくとも、固定型の検体処理ユニットを具備した本体処理部と検体を何度でも出し入れできる本体留置部を具備し、前記、本体留置部,処理部内での移動は、搬送ラインに沿った移動のみで完結し、かつ、必要に応じ、加熱,攪拌等のいくつかの検体処理は、搬送ラインを搬送可能な搬送ホルダを用いて処理可能である事などを特徴とする検体処理システムを提供する。
【解決手段】少なくとも、固定型の検体処理ユニットを具備した本体処理部と検体を何度でも出し入れできる本体留置部を具備し、前記、本体留置部,処理部内での移動は、搬送ラインに沿った移動のみで完結し、かつ、必要に応じ、加熱,攪拌等のいくつかの検体処理は、搬送ラインを搬送可能な搬送ホルダを用いて処理可能である事などを特徴とする検体処理システムを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生体試料に対し、自動で処理あるいは分析の少なくともいずれかを行う、自動検体処理装置に関する。特に検体複数に対し、個々の処理時間が比較的長い工程を含む検体処理を逐次的に処理,分析する装置において、搬送経路の複雑化,搬送シーケンスの複雑化を回避する技術に関する。
【0002】
ここで、自動検体処理装置とは、自動分析装置,核酸抽出装置、等のように、生体試料等に対して、試薬の分注,攪拌,温度調整、等の処理を、自動で行う装置のことである。
また、処理あるいは検体処理という用語は、検体に対して分注,攪拌,加熱等処理を行うといった一般的な意味に加え、光度計等による測定,分析を行うことも、含意するものとする。すなわち、処理あるいは検体処理という用語は、処理/測定機能と同義である。
【0003】
ここで、検体とは、血液,細胞片,血清等の生体試料に加え、反応液等も含むものとする。
【背景技術】
【0004】
自動検体処理装置とは、血液検査,核酸抽出,核酸増幅、等のように、生体試料に対して、試薬の分注,攪拌,温度調節,搬送、等の検体処理を、自動で行う装置のことである。ここで、検体とは、血液,細胞片,血清、等の生体試料に加え、反応液等も含むものとする。
【0005】
従来の自動検体処理装置は、大まかに逐次処理型と、バッチ処理型の2種類に分類できる。
【0006】
逐次処理型の自動検体処理装置とは、検体が投入されるにつれ随時処理を開始し、逐次的,連続的に処理を進めていく方式である。現行の血液検査装置は、概ねこの方式をとっている。逐次処理型では、同一種類の処理が連続的に発生する場合には、検体の到着順に順次、連続的に処理ができ、処理の待ち時間を最小化できる。
【0007】
一方で、逐次処理方式では、処理シーケンスの変更に対するフレキシビリティーが低い。この点に関しては、複数のモジュールを搬送ライン(例えば特許文献1,2)を介して接続したモジュール方式分析装置(例えば特許文献3)が市販化されている。ここで、モジュールとは、自動検体処理装置の構成要素の一つで、機能ブロックとしての役割を担う、固定設置型の装置で、処理機構か、分析機構か、少なくともいずれかのユニットを具備した自律型の固定設置型の装置を意味する。また、処理機構とは、攪拌,温度調節等の検体処理を行うための機構を意味し、分析機構とは、分光光度計等のように、検体に対し分析を行う機構を意味する。尚、処理機構は、分析機構も含意するものとする。モジュール方式を用いると、検査項目に応じた分析システムの設計変更は、用意するモジュールの数や種類の増減と、モジュール間の接続方法の変更のみで対応できる。
【0008】
しかしながら、モジュール方式であっても、搬送ラインの構成を組み替える必要性や、モジュール数の変更の必要性が生じる点においては、フレキシビリティーが高いとはいいがたい。また、モジュール方式であっても、一つの検体に対して処理を行う回数が増えれば、装置の肥大化が当然発生する。単純に考えれば分注回数が5回ならば分注モジュール(容器に試薬を分注する等の分注動作を行う分注器を備えた処理モジュール)を、5個用意する必要がある。
【0009】
さらに検体の種類や処理目的等により、分注される試薬の量や種類や分注回数,加熱処理の条件やタイミング,攪拌処理の条件,方法やタイミング等が大きく異なる処理項目複数を処理する需要に対して応えるためには、逐次処理方式の自動検体処理装置では、検体処理手順が異なる毎に専用の装置構成を準備する必要があるため、不利である。
【0010】
逐次処理型の自動検体処理装置において装置の肥大化を防ぐ手段としては、従来から処理部の一部にターンテーブルを用いる手法がある(例えば特許文献4参照)。このような方法は、検体を、複数の容器を円周上に並べたことを特徴とする反応ディスクと、反応ディスクを載せ、回転させるためのターンテーブルと、反応ディスクにアクセス可能な複数の処理/測定機能を具備していて、処理/測定機能は、自分の前に来た検体に対して、分注や光学測定を行う。このようにすると、処理/測定機能を使いまわすことができる。例えば、様々な試薬を使い分けて分注できる分注器が一つあれば、一つの容器に何回でも分注できる。どの検体の処理間隔も一定の場合において、特に短時間の間に、周期的に検体処理をする場合に、少ない処理モジュール数で、時間効率もよく処理ができる。
【0011】
しかしながら、前記ターンテーブルを用いて、多数の検体を逐次処理する方法は、処理/測定機能での処理及び測定間隔が一定でない場合には効果が限定的である。例えば、1回の分注動作自体は、プロトコールによらず概ね一定であるとしても、分注間隔(すなわちある試薬を分注してから次の分注を行うまでの間隔)が、検体によってまちまちであれば、効果が限定的である。また、処理間隔が一定となる検体処理であっても、処理間隔が長い場合には、処理/測定機能の稼動効率が悪くなる。つまり、処理/測定機能が稼動せずに次の処理測定を待つことになる。このような場合にも、ターンテーブルに乗せる検体数を増やせば稼動効率の低下は避けられるが、ターンテーブル自体が大きくなり、空間効率が悪くなる。
【0012】
バッチ処理型の自動検体処理装置(例えば特許文献5)は、分注,攪拌,温度調節等の検体処理の工程全てを一つの自動検体処理装置内で行えるよう設計された自動検体処理装置に、同一工程の処理を行う検体を数検体から数十検体といったある程度まとまった単位(バッチ)ごとに一括して投入し、まとめて処理する検体処理方式である。
【0013】
バッチ処理方式では試薬の分注回数や、温度調節条件,攪拌条件等が変わったとしても装置全体を組み替える必要が少ないといったメリットがある。また、比較的省スペースで実現できる傾向がある。
【0014】
一方、一つのバッチについての処理が全て終わるまでの間は、新たな検体の処理を開始することができないことや、一つのバッチを処理している最中に、別の処理工程を必要とする検体を処理する必要が生じた場合には、片方の検体の処理が終了するまで、新たに投入された検体は待機している必要が有るなどの問題がある。また、処理が逐次的でないため、処理が終了した時点において、作業が集中するなど、後工程の作業分散という観点からの効率も悪い。
【0015】
また、バッチ処理方式,逐次処理方式問わず、加熱装置や攪拌装置に容器を移載する場合には、通常は、移載器を必要とする。移載器とは、容器をチャック機構等で掴み、前記チャック機構等で容器を把持した状態で、チャック機構等を3次元的に移動させることで、容器を搬送ホルダ等から取り出す装置のことである。この方式では、移載器で、加熱装置や攪拌装置に装着し、さらに処理が終わった後に、移載器で容器を加熱装置や攪拌装置から取り出し、処理が終わったら再び搬送ホルダに戻すといった方法(例えば特許文献6)が、既にいくつかの装置で実施されている。しかし、このような方法は、先に述べたように、多くの工程間を移載器で移動させるといった手間が掛り、この手間は、制御アルゴリズムを複雑化するだけではなく、処理時間が、移載器の処理速度に律束されることになる。そのため、スループットの観点から不利であり、また、移載器を用いた移載は、容器を宙釣りにするため、特に容器が高温である場合や、結露が生じている場合には、事故のリスクが考えられる。
【0016】
以上が、本発明全体の技術的背景である。
【0017】
その他に本発明の個々の要素の背景技術としては、生命科学に関する技術(例えば特許文献7−9,非特許文献1−3)や、通信・制御に関する技術(例えば特許文献10,11,非特許文献4)等がある。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開1995−128342号公報
【特許文献2】特許3905094号公報
【特許文献3】特許第2988362号公報
【特許文献4】特許第1330782号公報
【特許文献5】特許第4264134号公報
【特許文献6】特表2009−500619号公報
【特許文献7】EP0389063
【特許文献8】US6468810
【特許文献9】特開2007−226771号公報
【特許文献10】US3551889
【特許文献11】US6853312
【非特許文献】
【0019】
【非特許文献1】R. BOOM, et.al, JOURNAL OF CLINICAL MICROBIOLOGY 28, 495 (1990).
【非特許文献2】James D. Watson 他著,中村桂子 監訳,滋賀陽子 他訳;“ワトソン組換えDNAの分子生物学 第3版 遺伝子とゲノム”丸善(2009/1/23)
【非特許文献3】Jana L. Gevertz,et.al, BIOTECHNOLOGY AND BIOENGINEERING,92,347(2005)
【非特許文献4】S. Hoshino, et.al, IEEE Transactions on Automation Science and Engineering 4, 360 (2007)
【発明の概要】
【発明が解決しようとする課題】
【0020】
本発明の目的は、自動検体処理装置分野において、装置を肥大化させずに、逐次処理を実施でき、かつ搬送経路の複雑化や装置の肥大化を回避する技術を提供し、この技術に基づいた、空間効率,時間効率が良く、搬送経路,搬送制御が単純となる検体処理システムを提供することにある。
【0021】
本発明の他の目的は更に、新たな方式の処理シーケンスを要する検体を追加する場合であっても、装置構成を変更することなく、簡便に当該装置で処理可能な処理シーケンスの拡充をすることができる検体処理システムを提供することにある。
【0022】
本発明の、他の目的は、試薬の分注回数や、温度調節条件,攪拌条件,攪拌回数等が一通りではない場合でも、一つの装置で逐次的に処理できる検体処理システムを提供することにある。
【課題を解決するための手段】
【0023】
本発明の自動検体処理装置は、以下の構成を備えることを特徴とする。すなわち、容器に入れられた検体を搬送可能な状態に固定するための搬送ホルダ多数と、前記搬送ホルダを装置内に投入する本体投入部と、投入された搬送ホルダを所定の時間留置させる本体留置部と、搬送ホルダ検体を搬送する搬送ラインを有し、当該搬送ライン上の搬送ホルダに収容された検体に対して処理を施す本体処理部と、を備えた自動検体処理装置であって、前記本体留置部は搬送ホルダを留置させる少なくとも一本の搬送ライン(留置ライン)を有し、前記本体留置部と前記本体処理部との間を前記搬送ホルダが行き来するための搬送ラインを備え、前記留置ラインはループを形成するように構成されていることを特徴としている。尚、搬送ホルダは、本体から取り外し可能である。
【0024】
また、本発明の自動検体処理装置は、必要に応じ、検体処理機能を持つ搬送ホルダ多数を装着可能で、前記ホルダを多数装着した状態であっても、個々の搬送ホルダごとに独立に動作や処理の制御が可能であることが好ましい。
【0025】
また、本発明の自動検体処理装置は、本体処理部で、少なくとも一つの搬送ラインと、分注器等のオンラインで検体に処理を施すことができる処理機構検体(オンライン処理ユニット)を具備した本体処理部を具備している。好ましくは、処理機構検体にて実施される検体処理は、前記搬送ホルダ上で行われる検体処理に対し、短時間で実施可能であることが望まれる。好ましくは、搬送ホルダを、搬送ライン上の特定の部分において停止させる機能(ストッパ)を具備し、検体処理機構は搬送ラインの特定部分において停止した搬送ホルダに直接アクセスし、処理を行えることが望ましい。尚、ここでは、検体処理とは、検体の分析をも含意するものとする。
【0026】
また、本発明の臨床検体処理システムは、少なくとも、留置した検体が、本体処理部で処理を行うタイミングになった場合には、本体処理部で処理を行う順に検体を取り出すことができる。
【0027】
また、本発明の臨床検体処理システムは、本体処理部で処理を終えた検体を、再度本体留置部内に取り込むことができる。
【0028】
また、本発明の自動検体処理装置は、システム全体を制御する本体制御部を備えている。検体処理機能を持つ搬送ホルダを使用する場合には、本体制御部は、有線/無線の通信手段を介して搬送ホルダ一つ一つと通信して搬送ホルダに備わる検体処理機能に対し処理を実行するよう命令を送信し、本体留置部に対して搬送ホルダを出し入れするタイミングを制御し、本体処理部で処理を行うタイミングを制御することができることが望ましい。
【発明の効果】
【0029】
上記構成により、検体処理を行う際の搬送シーケンスは、本体処理部と、本体留置部との間での検体搬送ホルダのやりとりのみを考えればよいため、搬送シーケンスを簡単にすることができる。また、処理シーケンスが異なる検体を同時並行で処理する場合や、新たな処理シーケンスを追加する場合にも柔軟に対応できる。
【0030】
また、本体留置部から検体を出し入れする操作は、搬送ホルダを搬送ラインに沿って搬送するのみであるため、検体を出し入れする際に搬送ホルダから容器を取り外す必要はなく、搬送ラインから搬送ホルダを持ち上げる必要もない。このため、検体容器を掴み挙げる移載器等の構成は不要となり、さらに掴み上げて搬送することによる検体がこぼれる等の不慮の事象を起こすことが無い。
【0031】
また、搬送ホルダに独立制御可能な検体処理機能を備えている場合には、搬送ホルダで処理可能な項目については、処理条件や処理時間が異なる検体を、投入された順に同時並行で処理できる。本体処理部上での処理が必要となった検体は、順次本体処理部に投入し、処理することができるため、検体複数が逐次的に投入され、それぞれの検体の加熱,攪拌等の処理条件や処理時間(例えば分注間隔等)がまちまちな検体の場合でも、逐次処理が可能である。
【0032】
また、現実の検体処理では、(1)処理時間が長い処理項目(温度調節、場合によっては攪拌処理),(2)頻繁に行う処理項目(例えば攪拌処理),(3)処理時間が処理シーケンスによらずほとんど一定で短く、頻度も中程度以下の処理項目(例えば分注や磁性ビーズの捕獲等)に分かれる。(1)および(2)は小規模な装置構成で実現可能な場合が多く、(3)は比較的規模の大きな装置構成となる傾向がある。従って、処理項目(1)および(2)を搬送ライン上の搬送ホルダ上で行い、処理項目(3)に相当する分注や、磁性ビーズの捕獲等の処理項目を本体処理部で行うことにより、どの処理工程においても装置の待機時間が少なくなり、マシンタイム上の効率を向上することができる。更に、本体処理部に設置された処理機能は、1つの検体の処理を行う上で必要な使用回数によらず1台ですむ。処理部に設置された処理機能が分注器で、1つの検体の処理を行う上で必要な使用回数が5回であったとしても、5回、検体を、搬送ホルダごと本体留置部と本体処理部とのあいだで往復させればよいため、1台の分注器を用意すればよい。
【図面の簡単な説明】
【0033】
【図1】本発明の形態における搬送ホルダの外観図。
【図2】本発明の形態における搬送ホルダの正面図。
【図3】本発明の形態における搬送ホルダの平面図。
【図4】本発明の形態における搬送ホルダのA−A線断面図。
【図5】本発明の形態における搬送ラインの断面図。
【図6】本発明の形態における搬送ホルダを装着時の搬送ラインの断面図。
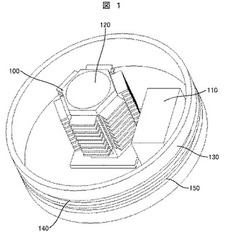
【図7】本発明の形態における自動検体処理装置の外観図。
【図8】本発明の形態における本体処理部の構成。
【図9】本発明の形態における本体留置部の構成。
【図10】本発明の別形態における本体留置部を構成するセルユニットの構成。
【図11】本発明の形態における本体留置部の構成。
【図12】本発明の形態における本体投入部の構成。
【図13】本発明の形態における本体収納部の構成。
【図14】本発明形態における検体処理のフローの一例を示すフローチャート。
【図15】本発明の別形態における搬送ホルダの構成。
【図16】本発明の別形態における搬送ホルダの構成。
【図17】本発明の形態における栓。
【図18】本発明の形態における栓を容器に装着した状態。
【図19】本発明の形態における栓を容器に装着した状態。
【図20】本発明の形態における栓を容器に装着した状態。
【図21】本発明の形態における栓を容器から取り外す様子。
【図22】本発明の形態における本体処理部の構成。
【発明を実施するための形態】
【0034】
<搬送ホルダの構造と構成>
図1〜図4に本発明における搬送ホルダの一例を示す。
【0035】
搬送ホルダは、少なくとも容器を垂直に保持する容器保持部100と、検体の温度調節を行うための温度調節素子310(a)−(f)と攪拌素子430とを具備し、搬送ホルダ底部440には、非接触型のIC(Integrated Circuit)カードと同様の、近接通信を行う手段450を具備し、温度調節素子310(a)−(f)と攪拌素子430を制御するホルダ内制御部110を具備していることを主な特徴としている。
【0036】
搬送ホルダの容器保持部100は、アルミニウム等のように熱伝導効率の良い物質で作られていることが望ましい。また、搬送ホルダの容器保持部100は、容器を挿入するための容器保持部120と、容器保持部の中心軸400に垂直な平面による断面形状が六角形となるように加工されていて、容器保持部の外壁300(a)−(f)には、温度調節素子310(a)−(f)としてペルチェ素子が貼り付けられている。また、ペルチェ素子の外側には、放熱部材として、ヒートシンク320(a)−(f)が貼り付けられている。本例では、温度調節素子としてペルチェ素子を用いたが、加熱のみしか行わない場合には、電熱線やセラミックヒータ等のジュール熱を用いた加熱素子で置き換えてよい。容器の温度を測定するための温度センサが具備されていても良い。
【0037】
搬送ホルダには、容器外側から振動を与え、容器内の検体を攪拌するための攪拌素子430として小型のバイブレータを具備している。バイブレータ以外の攪拌素子としては、超音波振動子やシェイカーを具備する形態も考えられる。
【0038】
搬送ホルダ外壁部130は絶縁性の部材で形成され、外部から電力を受け取るための上側のホルダ電極140と下側のホルダ電極150とが、上下平行に2本設置されている。
【0039】
また、ホルダ内制御部110は、自動検体処理装置本体には、自動検体処理装置全体を制御する制御装置,本体制御部720(後述図7にて図示)との通信制御や、自動検体処理装置本体から発行された命令を解釈,記憶する手段として、制御回路410も具備している。また、内蔵電池を備えた電源部420があっても良く、状況に応じて、温度調節機構,攪拌機構,ホルダ内制御部等に供給される電力を、内蔵電池あるいは、外部電力のいずれかに切り替えて使用しても良い。また、外部電源を用いて内蔵電池を充電する手段を備得していても良い。
【0040】
尚、以降は、特に断りのない限り、検体は、搬送ホルダに装着された容器に入れられているものとする。
【0041】
<搬送ラインの構造と構成及び動作の一例>
図5に本実施例の形態における搬送ラインの垂直断面図を示す。図6に搬送ホルダを装着時の、搬送ラインの垂直断面図を示す。
【0042】
ガイド電極540,550は、線状の金属製の電極を板状の絶縁材530に対して並行に二列固定することで作成されている。このように一体として作成したガイド電極(540,550)を、搬送ラインの左右両側に設置された壁520(a),(b)に貼り付ける。具体的に左側の壁520(a)には、ガイド電極540(a)とガイド電極550(a)と、ガイド電極540(a)とガイド電極550(b)の間を絶縁する絶縁材530(a)を具備している。右側の壁520(b)には、ガイド電極540(b)とガイド電極550(b)と、ガイド電極540(b)とガイド電極550(b)の間を絶縁する絶縁材530(a)を具備している。
【0043】
床500の上面には、搬送ホルダを搬送するための搬送ベルト510が張られている。
即ち、ベルトライン方式を採用する。ベルトライン方式は、大量の搬送ホルダを少数のアクチュエータで搬送できる点や、加減速を頻繁に行う必要がない点において移載器等よりも制御が容易で、搬送ホルダを宙釣りにする等のリスクの高い工程が不要な点において、移載器等よりも信頼性も高い。
【0044】
ガイド電極は、搬送ホルダのホルダ電極140,150と接触するように上下に設置されている。上側の二組のガイド電極540(a)とガイド電極540(b)には同電位が印加され、下側の二組のガイド電極550(a)とガイド電極550(b)には同電位が印加される。また、上側のガイド電極540(a)およびガイド電極540(b)は上側のホルダ電極140と、電気的に接触する。また、下側のホルダ電極150は、ガイド電極550(a)およびガイド電極550(a)と、電気的に接触する。
【0045】
また、電極が両壁面にあるため、万一ベルトライン上で検体が零れても、上側のホルダ電極140とガイド電極540、下側のホルダ電極150とガイド電極550の間で導通が生じるリスクは極めて少ない。また、ガイド電極を側壁に設けることで、ベルトラインによる搬送と、レールによる電力供給が両立することができる。
【0046】
ベルトラインの一部には、その一部の床部下面に、搬送ホルダ底面に備わる近接通信手段450に対して情報のやり取りをするための近接通信手段560を備える。尚、床部が金属などのように電磁波の透過性が悪い素材でできている場合には、近接通信手段を取り付けた部分付近の床500には、穴(図中には記載しない)をあける必要が生じる。
【0047】
以下、搬送ラインはベルトラインである場合を中心として説明するが、搬送ラインの別の形態としては、自走路を用いる形態も考えられる。
【0048】
<本体の構成について>
図7に、本実施例の形態における、自動検体処理装置全体の構成を示す。
【0049】
また、本発明の自動検体処理装置は、少なくとも、検体に何らかの処理(分注,光学測定など)を加えるための本体処理部700,搬送ホルダに装着した検体を所定の時間留置させる本体留置部710,オペレータによって、あるいは搬送ラインを介して搬送ホルダに装着した検体を投入する本体投入部730,処理の完了した搬送ホルダを収容する本体収納部740、さらにはこれらの構成要素の動作、及び搬送ホルダによる搬送中処理動作を制御する本体制御部720から構成されている。尚、搬送ホルダで行える検体処理については、搬送ライン上(主に本体留置部)で行われるものとする。
【0050】
<本体処理部について>
図8に、本実施例の形態における、本体処理部700の具体的な構造,構成の一例を挙げる。本実施例の形態において、本体処理部700は、主に3本の搬送ライン800,810,820と搬送ライン810に隣接したオンライン処理ユニット815と、搬送ライン810を搬送される搬送ホルダとを、オンライン処理ユニット815の前で停止させるストッパ816から構成されている。
【0051】
ここで、オンライン処理ユニットとは、検体に対し、処理,分析を行う固定型の検体処理機構で、特に、搬送ライン上に停止した搬送ホルダあるいは搬送ライン上を搬送されている搬送ホルダに装着された検体に対し直接アクセスし、処理,分析できる処理/分析機構のことを意味する。
【0052】
オンライン処理ユニットの具体例としては、搬送された容器に試薬を分注する分注機構や、搬送された容器に収容された液体の吸光度や散乱光強度などを測定する光学測定装置等、様々なものが想定される。
【0053】
次に、搬送ラインの搬送方向について簡単に説明する。図8の搬送ライン800の位置を模式的に示す長方形内には、搬送ライン800の搬送方向801が、補助記号として記載されている。この矢印は、搬送ライン800の搬送方向を説明するために記載されたものである。即ち、搬送ライン800は矢印の方向に従って容器を搬送する。以降、搬送ラインの搬送方向の説明は同様に行い、以降搬送方向を示す矢印には符号を付さない。また、搬送ラインには、搬送方向が一方通行の場合(矢印が一つしかかかれていない場合)には、上流側、すなわち、矢印の矢尻側と、下流側、すなわち矢印の矢先側にそれぞれ1つずつ末端が存在することになる。以降、このような場合には、矢尻側の末端のことを上流側末端、矢先側の末端のことを、下流側末端という。例えば、802は、搬送ライン800の上流側末端であり、823は搬送ライン820の下流側末端である。上流側末端,下流側末端についても、以降は符号を付さない。
【0054】
次に、図8の本体処理部の搬送ライン配置について説明する。搬送ライン800と820は互いに平行で、搬送ライン800の搬送方向と搬送ライン820の搬送方向は逆方向である。搬送ライン810は、上流側側面にて搬送ライン800と交差し、下流側側面にて搬送ライン820交差する。
【0055】
尚、搬送ラインの交差部に対向する角、例えば818等は、フィレット形状(1/4円弧形状)であることが望ましい。図中では、直角状の角が描かれているが、適宜フィレット形状とするのがよい。
【0056】
次に、図8の本体処理部での搬送ホルダの流れ及び、検体処理の流れを説明する。
【0057】
直線搬送ライン800の上流側末端802から導入された搬送ホルダは、搬送方向に沿って搬送ライン810に導入される。
【0058】
次に、搬送ライン810上でストッパ816により一時停止され、この状態でオンライン処理ユニットでの処理が施される。同時に、搬送ライン810の、ストッパ付近の床裏面に設置された近接通信手段817を通じて、本体制御部720と通信しオンライン処理ユニットによる処理が終わった後、ストッパ816により一時停止が解除され、再び搬送ライン810上を搬送される。
【0059】
最後に、搬送ホルダは、搬送ライン820に導入され、搬送ライン820の末端部823から本体処理部700の外部へ搬送される。
【0060】
搬送ラインが全てベルトラインである場合、搬送ホルダを停止させる場合に、搬送ラインの搬送ベルトそのものを止めても良いが、本発明の形態においては、以降、ストッパは、メカニカルストッパとする。メカニカルストッパとは、少なくとも1つのアームを具備し、少なくともアームを搬送ライン上に突き出した状態(ON)と、アームを搬送ライン上に突き出さない状態(OFF)の2つの状態を実現できるストッパである。ONの状態においては、搬送ホルダとアームが機械的に接触することで、搬送ベルトが駆動中にも搬送ホルダを停止させることができ、OFFの状態では、アームは搬送ホルダの搬送を妨害しない。
【0061】
<本体留置部について>
図9に、本体留置部の構成の一例を示す。前記本体留置部は、4本の搬送ライン910,920,930,940からなるループ状の搬送ライン(ループライン)と、投入ライン911と、収納ライン935と、ストッパ912,913,931,940と、分枝機構933,934から構成されている。
【0062】
図9の、本体留置部では、前記ループラインのループ内に搬送ホルダ複数を留置することができる。
【0063】
投入ラインは、容器に入れられ搬送ホルダに装着された検体で、これから処理を行う検体を、本体留置部に投入するための搬送ラインで、本体投入部730に接続される。収納ラインは本体収納部740に接続される。
【0064】
また、搬送ライン910の上流側末端と、搬送ライン930の下流側末端は、本体処理部700と接続され、搬送ライン910の上流側末端は、本体処理部700から検体を受け取るために用い、搬送ライン930の下流側末端は、本体処理部700に検体を引き渡すために用いる。図8に示す本体処理部を用いる場合には、搬送ライン910の上流側末端は、搬送ライン820の下流側末端823と接続され、搬送ライン930の下流側末端は、搬送ライン800の上流側末端802と接続される。
【0065】
ストッパ931は、前記ループライン上で、搬送ホルダを一時停止させるために設けられたメカニカルストッパである。
【0066】
分枝機構933,934は、以降断りのない場合には機械的な分枝機構とする。機械的な分枝機構にはいくつかの形態が考えられるが、以降断りのない限り、少なくとも1つのアームを具備し、少なくともアームを搬送ライン上に突き出した状態(ON)と、アームを搬送ライン上に突き出さない状態(OFF)の2つの状態を実現できる分枝機構を指す。ONの状態では、アームによって、搬送方向がアームに沿って曲がり、OFFの状態では、搬送ラインの搬送方向のままである。また、分枝機構は必要に応じ、センサを具備し、前記センサは、搬送ライン上を搬送される搬送方向を切り替えたい搬送ホルダが上流側から接近してきたことを検知するためのセンサを具備しているものとする。
【0067】
分枝機構933は、搬送ライン930上を直進する搬送ホルダの進路を切り替え、ONの状態において、搬送ライン940に導入するために設けられ、分枝機構934は、ONの状態において、搬送ライン935に導入するために設けられている。
【0068】
分枝機構933をONにしている限り、ストッパ931のON/OFFにかかわらず、ループライン内の搬送ホルダは、ループ内にとどまることになる。
【0069】
そして、ループ内から取り出したい搬送ホルダが、分枝機構933に接近し、かつ、前記搬送ホルダと、分枝機構933との間に別の搬送ホルダが存在しない状況において、分枝機構933をOFFにすることで、ループ内から、所望の容器のみを取り出すことができる。
【0070】
取り出したい搬送ホルダよりも上流側に別の搬送ホルダがあり、かつ、上流側の搬送ホルダと取り出したい搬送ホルダとの間隔が狭い場合には、上流側の搬送ホルダが全てストッパ931を通過した直後にストッパ931をONに切り替え、一旦取り出したい搬送ホルダを停止させた後、取り出したい搬送ホルダより上流側にある搬送ホルダ全てが分枝機構933を通過したのを確認してストッパ931をONにすれば、後続する搬送ホルダがループライン上から排出されることはない。これらの処理を実施するために、ストッパ931および分枝機構933の前後での搬送ホルダを検知するためのセンサ等を設けておくことが望ましい。
【0071】
前記の取り出したい搬送ホルダよりも下流側に別の搬送ホルダが後続し、かつ、下流側の搬送ホルダと取り出したい搬送ホルダとの間隔が狭い場合には、取り出したい搬送ホルダが、ストッパ931を通過次第、ストッパ931をOFFにし、後続する搬送ホルダ全てを一旦せきとめれば、後続する搬送ホルダがループライン上から排出されることはない。
【0072】
このようにして、ループライン内での搬送ホルダの順番にかかわらず、所望の特定の容器のみを、選択的にループライン外に取り出すことができる。
【0073】
ストッパ912は、本体処理部から戻ってきた搬送ホルダを必要に応じせきとめるためのストッパで、ストッパ913は、投入ラインから投入される容器を必要に応じせきとめるためのストッパで、ストッパ941は、搬送ライン上を搬送される搬送ホルダをせきとめるためのストッパである。これらのストッパを配置することで、搬送路の交差部において、ほぼ同時期に別のルートからそれぞれ搬送ホルダがある搬送ラインに導入されるような状況を回避できる。例えば、搬送ライン910に本体処理部から戻ってきた搬送ホルダと、搬送ライン911から投入された検体ホルダが、同時期にそれぞれのストッパ付近に差し掛かったとしても、より優先順位の高いほうのストッパをOFFにして、優先順位の低いほうのストッパをONにすれば、優先順位の高いほうの搬送ホルダを先に搬送ライン910に導入できる。
【0074】
尚、図9のような本体留置部の構成である場合には、ループライン内に留置させる検体の個数を多くするためには、ループに囲まれた領域(搬送ライン910,920,930,940に囲まれた領域950)の面積が増大し、結果として、空間効率が悪くなる。
このような場合には、本体留置部と本体処理部を一体化し、例えばループ上にもう一つ別のストッパ(図示しない)を設置して、ループ上の特定の場所において搬送ホルダを停止させる機能と、前記ストッパによって停止された状態にある搬送ホルダにアクセス可能なオンライン処理ユニット(図示しない)を、ループに囲まれた領域内に設置する方法や、ループ内に別のループを構成する方法が考えられる。
【0075】
ループ内に別のループを構成することで本体留置部の空間効率を上げる方法には、様々な構成が考えられるが、その一例を、図10,図11を用いて説明する。図10は、本体留置部の別の形態において、検体を留置するためのセルユニットである。セルユニットには、多数の搬送ホルダを留置することができ、セルユニットのループライン上に物理的に詰め込める個数とほぼ同等の個数の搬送ホルダをループライン上に数珠繋ぎに留置できる。実際には、セルユニットから搬送ホルダを搬出する際、あるいはセルユニットに搬送ホルダを投入する場合にスムーズな出し入れができるよう、満杯よりも数個少ない数を上限とすることが望ましい。
【0076】
このように搬送ライン,ストッパ,分枝機構を制御することによって、セルユニットに対して、所望のタイミングに目的の搬送ホルダを出し入れできる。また、検体を取り出す予定がしばらくないセルユニットに対しては、セルユニットを構成する搬送ラインの駆動を停止させるよう制御してもよい。
【0077】
セルユニットは、図10の例においては4本の搬送ライン1010,1020,1030,1040からなるループ状搬送ラインおよび、ループ状搬送ラインへ搬送ホルダを取り込むための搬送ライン(導入ライン)1000,分枝機構1021,ストッパ1001,1011,1022から構成されている。
【0078】
図10のセルユニットは、導入ラインを経由して搬送ライン1010に導入された搬送ホルダを、搬送ライン1010,1020,1030,1040から構成される前記ループライン内に留置する。搬送ライン1020の下流側末端は、ループラインから搬送ホルダを取り出すための、搬出口となっている。また、搬送ライン1020と1030の交差部には、分枝機構1021が設けられ、分枝機構1021をONにしている限り、前記本体留置部から、搬送ホルダが外に出ることはない。分枝機構をOFFにすると、搬送ライン1020上を搬送される搬送ホルダは、前記ループ外に排出される。連続して搬送される搬送ホルダのうち、特定の一つをループ外に取り出す手順は、図9の場合とほぼ同様で、図9のストッパ931と同様の役割をするストッパ1023が具備されている。搬送ライン1020の上流側末端は、後述のように別の搬送ラインと接続されることになるが、別の搬送ラインとの交差部において、ほぼ同時期に別のルートからそれぞれ、2つ以上の搬送ホルダがある搬送ラインに導入されるような状況を回避するために設置されている。
また、ストッパ1011や1001も同様の役割で設置されている。
【0079】
このようにして、ループライン内での搬送ホルダの順番にかかわらず、所望の特定の容器のみを、選択的にセルユニット外に取り出すことができる。
【0080】
図11に示す、本体留置部の別の形態は、図9の本体留置部から、搬送ライン940等を除外した搬送ライン系の内側に、図10のセルユニット1110(a)−(c)3つを備えた構成になっている。即ち、本例においては、3つのセルユニット1110(a)−(c)を囲むように配置された3本の直線搬送ライン910,920,930と、新たに投入された検体を投入部から搬送ライン910に取り込むための投入ライン911と、処理が完了した検体を本体収納部に送るための搬送ライン(搬出ライン)935と、搬送ライン910を流れる検体をいずれかのセルユニット1110(a)−(c)が備える投入ラインに搬送するための分枝機構1120(a)−(c)と、搬送ライン930を搬送される検体を本体収納部へと続く搬出ライン935に導入するための分枝機構934等から構成されている。
【0081】
また、本体留置部の搬送ライン910の上流側末端は、本体処理部700の出口、即ち搬送ライン820の下流側末端部823と接続され、搬送ライン930の下流側末端部は、本体処理部700の入り口、即ち搬送ライン800の上流側末端部802と接続されている。
【0082】
本体処理部から搬出された搬送ホルダや、本体投入部から投入された搬送ホルダは、処理シーケンスに従って本体留置部を経由し、いずれかのセルユニット、または本体処理部700に搬送される。いずれかのセルユニットに留置された検体は、前述の制御方法によって必要なタイミングにおいて、選択的に取り出すことが可能である。
【0083】
セルユニットから搬出された容器は、搬送ライン1130を経由して、本体処理部に導入されるか、あるいは、本体収納部に搬送される。本体処理部,本体収納部のいずれかに搬送するかは、その容器に収容された検体に規定されたシーケンスに従い、制御部が判断して、搬送ラインや分枝機構の動作を制御する。
【0084】
このように複数のセルユニットを備えることによって、複数の検体を留置することと、検体が投入された順序によらず、必要なタイミングにおいて、選択的に取り出すことと、所望のタイミングにおいて取り出すことと、高い空間効率を両立できる。
【0085】
<セルユニットの制御方法>
図10のセルユニットを有する本体留置部に対して、搬送ホルダを搬送する手順、および本体留置部から搬送ホルダを搬出する手順を説明する。これらの手順は、本体制御部の搬送制御機能からの命令で行われるが、処理のアルゴリズム等については、実施例1にて後述する。
【0086】
まず、セルユニット搬送ホルダを投入する場合について、セルユニット1110(b)に搬送ホルダを投入する場合を一例として例示する。手順は以下の通りである。
【0087】
(1)本体投入部あるいは、本体処理部から搬送ホルダが本体留置部の搬送ライン910に投入される。
【0088】
(2)搬送ホルダが、セルユニット1110(b)に搬入するための分枝機構1120(b)に接近したら、ストッパ1121(b)を駆動させ、当該搬送ホルダおよび、当該搬送ホルダよりも上流にある他の搬送ホルダを搬送ライン910上に一時停止させる。
【0089】
(3)ストッパ1121(b)と搬送ホルダとの間に、他の搬送ホルダが存在しない状態になった後、分枝機構1120(b)をONにして、セルユニット1110(b)への投入ラインに当該搬送ホルダのみを導入する。
【0090】
(4)1100(b)の導入ライン1000に設置されたストッパ1011を作動させ、搬送ホルダを導入ライン上に停止させる。
【0091】
(5)セルユニット1100(b)の搬送ライン1010上を搬送される他の搬送ホルダで、ストッパ1011よりも下流側に存在する搬送ホルダが,搬送ライン1000と搬送ライン1010の交差点を充分(搬送ホルダ1〜2個分)に通過したことを確認して、ストッパ1001をOFFにし、セルユニット1110(b)に検体を導入する。
【0092】
(6)ストッパ1011をOFFにし、(5)でせき止めた他の搬送ホルダについて搬送ライン1010上での搬送を再開する。
【0093】
上記(1)〜(6)の手順と同様の方法で他のセルユニットに対しても検体を導入でき、連続して搬送ホルダが搬送ライン910上を搬送されてきたとしても、所望の搬送ホルダのみを選択的にセルユニット内に導入することができる。
【0094】
次に、セルユニットから、特定の搬送ホルダを取り出す方法について、説明する。手順は以下の通りである。なお、分枝機構1021は、どのセルユニットにおいても通常はONであり、あらかじめONに設定されているものとする。また、各ストッパ,分枝機構には、これまで同様付近に検体が接近/通過した場合、どの検体が接近/通過したかを判定する手段が具備されているものとする。
【0095】
(1)セルユニットの搬送ライン1010,1020,1030,1040駆動させ、取り出す目的の搬送ホルダを、ストッパ1023の直前の位置に到達させる。
【0096】
(2)取り出したい検体よりも下流側の検体がストッパ1023の通過を確認次第ストッパ1023をONにして、目的の搬送ホルダを搬送ライン1020上に停止させる。
【0097】
(3)目的の搬送ホルダよりも下流側に位置する他の搬送ホルダ全てを、分枝機構1021に対して充分に通過させるよう、搬送ラインを引き続き駆動させる。
【0098】
(4)目的の搬送ホルダよりも下流側に位置する搬送ホルダが交差点を充分に通過した後に分枝機構1021をOFFにする。
【0099】
(5)ストッパ1023をOFFにして目的の搬送ホルダの搬送を再開する。
【0100】
(6)目的の搬送ホルダがストッパ1023を通過した後に、再びストッパ1023をONにして目的の搬送ホルダ以外をせき止める。
【0101】
(7)目的の搬送ホルダがOFFになった分枝機構1021を充分通過してストッパ1022付近に差し掛かった後、分枝機構1021をONにして、他の搬送ホルダがセルユニットの搬送ライン上をループできるようにする。
【0102】
(8)必要に応じ、ストッパ1023をOFFにして目的の搬送ホルダよりも下流側の搬送ホルダの搬送を再開する。
【0103】
このようにすると、各セルユニットから、セルユニット内の順番によらず、所望の検体のみを搬送ホルダごと、搬送ラインから離さずに取り出すことができる。一方、取り出しにかかる時間は、最悪の場合はセルユニットを一周するのと同程度の時間を要する。しかしながら、搬送ホルダ数十個を留置できるような構成を考えた場合、ループライン一周の長さは高々数百cm以内となり、搬送速度を、〜0.2m/s程度と、従来の検体搬送システムと同程度とした場合、高々数秒であり、通常の反応のタイムスケールに比べると、この程度の時間は、殆ど0と考えてよい。つまり、所望のタイミングでセルユニットから検体を取り出せると考えてよい。
【0104】
<本体投入部について>
本発明の本体投入部730を、搬送ラインとストッパの組み合わせで作成することも考えられる。図12に本発明の本体投入部を示す。本発明の本体投入部は、複数の並列に並べられた搬送ライン1200(a)−(d)のそれぞれに、オペレータが直接搬送ホルダを投入できる。搬送ライン1200(a),(b)の下流側末端は、いずれも本体留置部の搬送ライン1210の側面に接続され、搬送ライン1200(c),(d)の下流側末端は、いずれも本体留置部の搬送ライン1220の側面に接続されている。搬送ライン1210,1220はいずれも、搬送ライン1230の側面に接続されている。搬送ライン1230は、本体留置部、即ち、図9又は図11の搬送ライン911に接続される。
【0105】
ストッパ1201(a)−(d)を、OFFにすることで、必要なタイミングに搬送ホルダの搬送が開始され、搬送ライン1210又は搬送ライン1220に搬送ホルダが流れ込み、搬送ライン1230を経由して本体留置部に検体が投入される。
【0106】
本例の場合は本体投入部も搬送ラインで構成されているため、本体投入部上でも個々の搬送ホルダが保持している検体に対して処理を実施できる。
【0107】
尚、本例では、搬送ライン1200(a)−(d)のそれぞれに、オペレータが直接搬送ホルダを投入する場合を想定したが、搬送ライン1200(a)−(d)の上流側全てあるいは、いずれかは、何らかの前工程の装置と接続されていてもよい。
【0108】
また、搬送ライン1230には、搬送ホルダと通信するための近接通信手段1231が具備されているものとする。
【0109】
また、搬送ライン1200(a)−(d)の全ては、別途、導入された検体の検体番号を判別するための機構(例えば、検体容器に貼り付けられたバーコードを読むためのバーコードリーダ等)を具備しているものとする(図示しない)。この検体番号は、ホルダのIDやプロトコールと対応づけられる。
【0110】
本発明の本体収納部は搬送ラインで作成されているため、この上でも反応を開始できる。このような構成をとると、本体留置部への引渡し前から、反応を開始させる必要がある場合に有利である。逆に、搬送ホルダの温度調節機構にペルチェ素子を採用した場合には、ペルチェ素子に、加熱時と逆極性電圧を印加することで、検体を冷却すれば、検体の温度を下げることができ、反応を抑制する方向に律束した状態で待機させることができる。
【0111】
<本体収納部について>
また、本発明における本体収納部も、搬送ライン,ストッパ,分枝機構等から構成することができる。
【0112】
図13に本発明の本体収納部を示す。本発明の本体収納部は、複数の搬送ライン1300(a)−(d)並列に並べられた部分を持ち、搬送ライン1300(a),(b)の上流側末端は、搬送ライン1310の側壁と接続され、搬送ライン1300(c),(d)の上流側末端は、搬送ライン1320の側壁と接続される。さらに、搬送ライン1310,搬送ライン1320の上流側末端は、搬送ライン1330の側壁と接続される。搬送ライン1330の上流側末端は、本体留置部、即ち、図9又は図11の搬送ライン935と接続される。
【0113】
本体留置部から、排出された搬送ホルダは、搬送ライン1330に導入される。このとき、搬送ライン1300(a),(b)のいずれかに収納する場合には、分枝機構1311をON、分枝機構1312をOFFにして、搬送ホルダを搬送ライン1310に導入し、その後、搬送ライン1300(a)に導入したい場合には、ストッパ1302をOFFにし、搬送ライン1300(b)に導入したい場合にはストッパ1302をONにすればよい。搬送ライン1300(c),(d)のいずれかに収納する場合には、分枝機構1311をOFF、分枝機構1312をONにして、搬送ホルダを搬送ライン1320に導入し、その後、搬送ライン1300(d)に導入したい場合には、ストッパ1303をOFFにし、搬送ライン1300(c)に導入したい場合にはストッパ1303をONにすればよい。尚、個々のストッパが、これからどの検体が通過するかを判断するための手段として、センサや、カウンタ等が別途装着されているものとする(図示しない)。また、分枝機構付近を同時に複数の搬送ホルダが通過するのを防ぐため、ストッパ1311を用いて搬送タイミングの制御をしているものとする。
【0114】
また、搬送ライン1300(a)−(d)の下流側末端には、それぞれ搬送ラインをせき止め、機械的に搬送ホルダの進行をとめる手段としてストッパ1301(a)−(d)が備えられている。このようにすることで、搬送ラインから搬送ホルダが零れ出ず、また、ストッパと接触するか、自分より前に収納された搬送ホルダと接触するかのいずれの状態まで搬送ホルダは、搬送され、搬送ライン1300(a)−(d)のいずれかに、搬送ホルダが間を、間を空けずに収納されることになる。
【0115】
オペレータが、個々の搬送ラインから搬送ホルダを取り出す場合には、搬送ラインのベルトコンベアを停止することができる手段を別途具備(例えばスイッチ)しているものとする(図示しない)。
【0116】
尚、本例では、搬送ライン1200(a)−(d)のそれぞれに、オペレータが直接搬送ホルダを投入する場合を想定したが、搬送ライン1200(a)−(d)の上流側全てあるいは、いずれかは、何らかの前工程の装置と接続されていてもよい。
【0117】
本発明の本体収納部は搬送ラインで作成されているため、この上でも反応を継続できる。このような構成をとると、後工程への引渡しまでの間反応を継続させる必要がある場合に有利である。逆に、搬送ホルダの温度調節機構にペルチェ素子を採用した場合には、ペルチェ素子に、加熱時と逆極性電圧を印加することで、検体を冷却すれば、検体の温度を下げることができ、反応を抑制する方向に律束した状態で収納できる。
【0118】
<本体制御部について>
次に、本発明の自動検体処理装置の本体制御部について説明する。
【0119】
本体制御部は、有線通信ラインにて各ユニットと情報のやり取りを行う。少なくとも、全ての搬送ライン,搬送ラインに隣接して設けられた分枝機構,全てのストッパの状態を制御する手段が具備されている。
【0120】
前記搬送ラインは、本体処理部700,本体留置部710,本体投入部730,本体収納部740を構成する搬送ライン等に具備された搬送ラインを含む。即ち、本体制御部は、搬送ラインの駆動/停止を切り替え、必要に応じ搬送速度,搬送方向を設定することができ、個々のストッパや分枝機構のON/OFFを切り替えることができるものである(以後、搬送制御機能と称する)。また、ストッパや分枝機構等に設置されたセンサからの搬送ホルダ情報を受信することもできる。
【0121】
本体制御部は、少なくとも本体処理部に設置された、オンライン処理ユニット等の検体処理機能の動作を制御することができる(以降、検体処理ユニット制御機能と称する)。
【0122】
また、本体制御部は、搬送ホルダ通信機能を具備している。この機能の下位の機能には、少なくとも個々の搬送ホルダに具備されたホルダ内制御部に、固有識別符号(固有ID)を割り付けるアドレッシング機能と、搬送ホルダに出すべき命令(例えば特定の時刻t0から室温から50°/minで70℃まで昇温すること等)を複数記憶する手段と、これらの命令を近接通信手段を介して搬送ホルダに送信できる形式に変換する手段を具備されている。即ち、既に投入された搬送ホルダに対し、固有のIDを付与し、個々の搬送ホルダに対して、加熱や攪拌といった命令を送信することができ、必要に応じて個々の搬送ホルダから送信される信号を受信することができる。
【0123】
また、本体制御部は検体処理プロトコール記憶機能を具備している。通常、用手法,自動機による検体処理に問わず、処理手順が既に確立している検体に対しては、検体の種類や処理内容に応じ、検体処理プロトコールといわれる処理手順書が作成されている。検体処理プロトコールには、個々の検体処理項目を実施するための作業内容及び作業の順番,作業の開始/終了条件が記載されている。例えば、加熱時間,添加する試薬の種類,試薬分注量,分注開始条件等が記載されている。検体処理プロトコール記憶機能は、このような検体処理プロトコールを複数、メモリに記憶する機能である。
【0124】
また、本体制御部は、検体ID管理機能を具備している。通常、患者等から採取された検体そのものにも、固有のID(検体番号)例えば、「100704A10032」などといった数字と文字の組み合わせで書かれた固有のシリアル番号が付されている(検体番号は、通常検体容器にバーコードラベル等として貼り付けられている。)。検体ID管理機能は、前記IDと、検体処理プロトコールの種類と、搬送ホルダのIDを対応付ける機能である。
【0125】
また、本体制御部は、これから処理を行う検体、及び既に処理を開始している検体それぞれの処理シーケンスを、個々の搬送ホルダの固有IDと対応した検体処理プロトコールに基づいて定めることができ、個々の搬送ホルダに具備された検体処理機能のタイミング制御及び、本体留置部からの取り出しタイミングを含む、搬送系のタイミング制御,オンライン処理ユニットの動作タイミングを制御することができる。
【0126】
また、本体制御部は、ユーザーに現在の検体処理状況を通知し、必要な場合には割り込み命令をユーザーの意思で入力するためのGraphical User Interface(GUI)が具備されている。オペレータはGUIを通じて、検体ID管理機能の情報から、どの検体にどのような処理がなされるかを確認/決定することができる。
【0127】
さらに、これらの機能の上位命令系統として、本体制御部はスケジューリング機能を具備する。スケジューリング機能は、検体ID管理機能等によって指定された個々の検体の検体処理プロトコールをプロトコール記憶機能から呼び出し、搬送ホルダ位置情報等の状況を加味して、搬送制御機能,検体処理ユニット制御機能,搬送ホルダ通信機能、を介して、個々の構成要素(搬送ホルダや搬送系等)をタイミング制御することで、全検体の処理のワークフローを定める。また、スケジューリング機能は、個々の搬送ホルダを本体留置部から出し入れするために、留置時間記憶機能や留置時間監視機能として、タイマー等を具備している。
【0128】
これらの手段を具備した本体制御部からの指示に従い、本体処理部での検体処理は、個々の検体の処理手順を定めた検体処理プロトコールに従い、本体制御部720からの指示で自動的に実施される。
【0129】
<搬送ホルダの制御方法>
本発明の自動検体処理装置本体には、本体制御部720が具備されている。本体制御部(720)には、個々の搬送ホルダに指令を出すためのホルダ通信機能が具備されている。本体制御部のホルダ通信機能には、下位の機能として、個々の搬送ホルダのホルダ内制御部に、固有識別符号(固有ID)を割り付けるアドレッシング機能と、搬送ホルダに出すべき命令(例えば特定の時刻t0から室温から50°/minで70℃まで昇温すること等)を複数記憶する手段と、これらの命令を近接通信手段を介して搬送ホルダに送信できる形式に変換する手段が具備されている。
【0130】
また、搬送ホルダ内制御部には前記固有IDを記憶し、この固有IDを通信手段にて外部装置から読み出すことを可能とする手段(例えば、RFIDやICタグ、等)が具備されている。前記自動検体処理装置は、搬送ホルダ通信機能、即ち前記搬送ホルダと近接通信手段等を用いて通信する機能を具備している。
【0131】
本体制御部に具備された搬送ホルダ通信機能検体と、搬送ホルダに具備されたホルダ内制御部の間の通信(近接通信手段、等)を通じて、以下の手順で通信・命令の送信を行う。
(1)ステップ1:搬送ホルダの固有IDを確認する。
(2)ステップ2:搬送ホルダが固有IDを記憶していない、あるいは、他の搬送ホルダと重複したアドレスを割り振られている場合には、新しい固有アドレスを割り付ける。
(3)ステップ3:搬送ホルダの、動作シーケンスを定めた命令を送信する。
【0132】
搬送ホルダ内制御部には、さらに、前記の温度調節機構の動作シーケンス,攪拌機構の動作シーケンスをプログラミング可能な機能が具備されている。このようなプログラミングは、本体制御部のホルダ通信機能を通じて、必要なタイミングで随時行われる。
【0133】
このようにして送信された温度調節機構の動作シーケンスを定めたプログラム(温度調節プログラム)には、個々の時刻における検体温度の目標値;yc0(t)が定められている。搬送ホルダ内制御部は、yc0(t)に基づいた電圧出力あるいは電力出力;xc(t)を温度調節機構に印加することで、温度調節機構に対し電力の供給と制御を行う。
【0134】
搬送ホルダが、温度センサ(図示しない)を具備していて搬送ホルダ内制御部が温度センサの値を解釈する機能を具備していても良い。この場合には、温度センサの出力値と、動作シーケンスに定められた値との偏差sc(t)を最小とするようにフィードバック制御することができる。
【0135】
また、必要に応じ、温度センサの出力値と、動作シーケンスに定められた値との偏差(sc(t))を記憶して、通信手段を介して外部に送信しても良い。これによって温度制御の異常(オーバーシュート,発振等)の有無を定期的に監視できる。
【0136】
同様に、攪拌機構の動作シーケンスを定めたプログラム(攪拌制御プログラム)には、個々の時刻における制御回路の出力値xm(t)が定められている。必要に応じ攪拌の強度を搬送ホルダ上でモニタする機能(加速度センサやピエゾ素子等)を具備していても良く、このような場合には攪拌強度をフィードバック制御することができる。
【0137】
搬送ホルダと自動検体処理装置の本体制御部との通信手段の別の形態としては、搬送ホルダおよびシステム床部に近接通信手段を備える代わりに、システムに備わるガイド電極と搬送ホルダに備わるホルダ電極を介して、搬送ホルダを駆動するための電力と同時に、信号を送信して処理シーケンスを制御する方法も考えられる。
【0138】
このような方式としては、信号多重化の技術が考えられる。このようが技術を用いることで、同一搬送路上に存在する複数の搬送ホルダの動作を、独立に制御することが可能である。方法としては、命令(コマンド)をデジタル信号を用いて有線で送信し、かつ電力搬送電圧を変調することで、電力とデジタル信号を一律かつ一斉に送信するDigital Command Control(DCC)制御方式を用いる。以下、具体的な方式を、説明する。
【0139】
この場合は、本体制御部720から送信される情報の伝送単位、即ちパケットは、デジタル信号の集まりである。すなわち、本体制御部720からは1と0の2つの状態だけからなる量子化された信号が、全ての搬送ホルダに対し一斉に伝達される。
【0140】
1と0の状態は、電圧信号を用いて表現する。このような方法には従来から様々な方法が(例えば特許文献10,11)知られているが、ここでは、一定振幅の矩形状パルスの、パルス長を用いて、1と0の状態を表現する矩形のPulse Width Modulation(PWM)信号を用いることにする。
【0141】
具体的には「0」を伝達するときは一定の基準値よりも長いパルスを、「1」を伝達するときには一定の基準値よりも充分短いパルスを出力することにする。パケットを送信しない場合であっても、搬送ホルダに対して矩形パルスを印加しつづける必要があるため、「1」に相当するパルスを送信することにする。
【0142】
次に、パケットの構成について、説明する。搬送ホルダのホルダ内制御部には、いくつかのデコーダが具備されている。デコーダとは、前記のPWM信号を解釈して、温度調節素子や攪拌素子等の、搬送ホルダに具備された機能を制御する機能のことである。
【0143】
それぞれのデコーダにはそれぞれのデコーダ固有の固有識別符号(固有ID)が割り付けられているものとする。つまり、例えば一つの検体ホルダに2つのデコーダが具備されていた場合には、この2つのデコーダの固有IDは異なるものが割り付けられる。他の搬送ホルダのどのデコーダとも別のアドレスが割り付けられている。
【0144】
次に、本形態の場合に本体制御部720の搬送ホルダ通信機能が、発信する信号パケットの構成について説明する。本発明の形態における信号パケットは、少なくとも、プリアンブル部と、アドレス部と、命令部との3つの種類の信号から構成されている。プリアンブル部は、パケットが今から送信されることを示すための信号である。アドレス部は、どの搬送ホルダに対する命令かを識別させるための信号であり前記固有IDに対応する。命令部は、「温度を50℃にせよ」等といった具体的な命令を伝達するための信号である。尚、信号伝達のミスを検出,訂正するための誤り訂正部を具備していても良い。
【0145】
プリアンブル部が必要な理由は、パケットの送信をしない場合には「1」に相当する信号が常に送信され続けているため、どこまでが、単に、電力を送信するためのパルスなのか、どこからが、パケットの開始なのかを識別する必要があるからである。
【0146】
さて、搬送ホルダに温度調節機構1つと、攪拌機構1つが具備されているものとし、それぞれに対応したデコーダ、即ち温度調節制御デコーダと攪拌制御デコーダが1つずつ、ホルダ内制御部に具備されている場合を一例に、デコーダの実装や構成について説明する。
【0147】
これらのデコーダそれぞれには、少なくともVcc電極とGND電極,Vout電極の三種類の電極があり、デコーダのVcc電極を上側のホルダ電極140に、デコーダのGND電極を下側のホルダ電極150にそれぞれ接続する。
【0148】
Vout電極は、制御対象である温度調整機構や攪拌機構に電力を供給,制御するための電極で、温調用デコーダのVout電極は温度調節素子に、攪拌用デコーダのVout電極は攪拌素子430に接続されている。
【0149】
本発明の自動検体処理装置に具備された本体制御部720には、個々の搬送ホルダに具備されたデコーダそれぞれに、固有のアドレスを割り付けるアドレッシング機能と、個々のデコーダに出すべき命令を複数記憶する手段と、命令を、前記の信号パケットに変換する手段を具備し、さらに前記信号パケットや、電力送信のための連続信号(即ちこの場合は連続した「1」)を、PWM信号として送信する機能を具備している。
【0150】
次に、信号伝達経路及び信号解釈の仕組みを、図6のように、上側のホルダ電極と上側のガイド電極が物理的・電気的に接触し、下側のホルダ電極と下側のガイド電極が物理的・電気的に接触した状態において説明する。
【0151】
前記のパケットは、前述のように、全てのデコーダに一斉に送信されるため、全ての搬送ホルダの全てのデコーダは、常時前記PWM信号を、電力を得るために使用すると同時に、パケットがされていないかを常に監視する。そして、パケットのプリアンブル部に相当する信号が送信されたことを確認した場合には、その次に続く前記のアドレス部が、自分あてのものであるか否かを判断する。そして、自分宛であれば、その次に続く命令部分を解釈しその操作入力内容を実行し、Vout電極に対して、電力を電圧出力する。この出力電圧値によって、温度調節デコーダは、温度調節機構の動作を制御し、攪拌制御デコーダは、攪拌機構の動作を制御する。
【0152】
尚、前記デコーダの出力電圧即ち、Vout電極から出力される電圧は、アナログ出力でなくてもよく、PWM出力であってもよい。即ち一定振幅の電圧V(t)を、矩形状に出力し、V(t)の、一定時間あたりの積分値が、所望の電圧となるように、出力する形態をとってもよい。デコーダの出力電圧にもPWM出力を用いると、アナログ出力をする場合に比べ、回路構成が簡単になるといったメリットがある。また、PWM出力をアナログ出力に変換するには、ローパスフィルターを用いればよいので、PWM出力ができれば、アナログ出力も可能である。
【0153】
尚、搬送路の交差点では、一瞬、電力および信号が途切れる場合がありえる。このような事態を避けるため、搬送路の交差点にガイド電極を具備したガイドを設置しても良い。
例えば、分枝機構のアーム部に、ガイド電極を具備すれば、このような機構が実現できる。
【0154】
上記方法によって、検体の温度調節や攪拌処理を搬送ライン上で実施し、かつ、独立に制御ができる検体搬送ホルダ及び、そのような検体搬送ホルダを搬送する搬送ラインを作成できる。また上記方法によれば、圧力印加や磁場印加,電場印加といった処理,CCD素子等による測定等が搬送ホルダごとに独立に制御可能である。磁場印加,電場印加,圧力印加が有効な事例の一例を以下にリストする。
電場印加:ゲル泳動,電気化学発光,電気分解等
磁場印加:磁性ビーズの凝集,分散
圧力印加:マイクロ流路を用いたデバイスの流路に差力圧を加えることで、液体やゲルを流路上で流す場合。
【0155】
また、自走に必要なモータや車輪,ギア等を搬送ホルダに備えれば、搬送ホルダの自走制御が可能な検体搬送システムとすることもできる。実現のためには、温度制御用デコーダ,攪拌制御用デコーダに加えて、搬送制御用デコーダを備え付けることにより、搬送方式をベルトライン方式に代え、自走方式に変更することもできる。
【0156】
また、通信手段としてもラジオコントロール等様々な方法が考えられる。一部の機能をDCC制御により制御し、他の機能を近接通信で制御するといった方法も考えられる。
【0157】
以上の方法で、本体処理部と本体留置部の間を往復し、本体処理部で処理又は測定を行う必要があるときだけ、必要な検体を本体処理部に取り出すことができることを特徴とした自動検体処理装置が実現される。また、本体留置部,本体処理部問わず様々な場所で反応を中断することなく継続することや、逆に反応を律束することもできる。
【実施例1】
【0158】
図8の本体処理部と、図11の本体留置部と、本体制御部を具備した自動検体処理装置に、搬送ホルダで独立制御可能な加熱機構を具備している場合を一例として、当該システムの処理シーケンスの一例を説明する。尚、図8の本体処理部のオンライン処理ユニットは、複数の試薬を切り替えて分注可能な分注器であるものとする。
【0159】
本例においては、検体の処理プロトコールが以下の通りであって、番号順に処理が行われる場合を考える。
1.当該システムへの検体ホルダの投入
2.検体への試薬の分注
3.検体ホルダを本体留置部へ移動
4.検体ホルダ上の加熱機構による加熱開始
5.本体留置部(セルユニット)からの取り出し動作を開始する条件
6.加熱終了
7.検体ホルダを検体収容部に収納
【0160】
まず、上記の処理シーケンスを、個々の処理の開始,終了条件がFirst-Come First-Served(FCFS)方式で決定する場合を一例に、検体処理のアルゴリズムを、1つの搬送ホルダ検体に着目して説明する。図14に、検体処理のアルゴリズムの一例をフローチャートで示す。
【0161】
このアルゴリズムでは以下のステップに従って判断をする。これらの内容は、検体の処理時には、本体制御部のスケジューリング機能に記憶されているものとする。また、搬送ライン上には、センサやバーコードリーダ等が適切な位置に配置され、適当なタイミングで搬送ホルダの情報および位置を確認できるものとする。搬送ホルダの位置を確認する場合、様々な配置が考えられるが、センサやバーコードリーダは、例えば、全ての分枝機構、ストッパにこのような機能が具備され、さらに、どの搬送ラインにも、上流側,下流側末端にはこのような機能が具備されていればよく、具体的な配置は図示しない。
【0162】
(1)ステップ1410:検体を当該システムに投入する。
本体制御部は、投入しようとする検体が投入部の搬送ライン1200(a)−(d)のいずれかの最前であり、他の搬送ラインにより優先順位の高い検体がないこと、および、当該検体の検体処理プロトコールで決定される次の搬送先に対して検体が搬送可能であること、を判断し、確認された場合には検体の投入を開始する。
【0163】
投入された検体ホルダは、オンライン処理ユニット(分注器など)や本体留置部(セルユニット)へと搬送される。
【0164】
搬送先が分注器である場合には、少なくとも以下の条件が満たされているときに搬送可能であると判断する。このようにすることで、渋滞,ホルダ同士の衝突等が回避される。
(A)先に分注器の使用を待っている検体が一定数以下であること(例えば5個)。
(B)分注器での処理を終え、本体留置部へ移動中(あるいは本体留置部への移動を待 機中)の検体が一定数以下(例えば3個)であること。
(C)搬送ライン910上に他の搬送ホルダがないこと。
【0165】
搬送先がセルユニットの場合には、少なくとも以下の条件が満たされているときに搬送可能であると判断する。このようにすることで、渋滞,ホルダ同士の衝突等が回避される。
(A)目的とするセルユニットに留置されている検体の個数(待機している検体数)が 一定数以下(例えば20個)であること。
(B)搬送ライン910上に他の搬送ホルダがないこと。
【0166】
なお、これらの条件を満たさない場合、検体は当該システムには投入されず、投入部に待機するよう制御される。
【0167】
(2)ステップ1420:分注器により試薬の分注動作を開始する。
検体がステップ1410により当該システムに投入された後は、本体制御部(は当該検体の処理プロトコールに指定された、使用する試薬の種類と量を確認する。使用する試薬がオンライン処理ユニットに在る場合、当該検体がストッパ816によって、分注器(オンライン処理ユニット815)の前に停止すると、試薬を吸引した分注ノズルが容器内部に挿入されていることを検知して検体に試薬の分注を行う。
【0168】
試薬の分注が指示されない検体については、ステップ1420は実行されずにステップ1430、もしくはステップ1440が実行される。
【0169】
(3)ステップ1430:検体ホルダを本体留置部へ移動する。
ステップ1410により当該システムに投入された検体であって、処理が指示されていない検体については投入処理の完了を、ステップ1420により必要な試薬が分注された検体は、試薬分注の終了および分注ノズルの引き上げを確認する。
【0170】
これらの処理の完了が確認されると、本体処理部は当該検体を留置するセルユニットを選択する。選択されたセルユニットへの搬入条件を満たしていること、必要な場合には近接通信手段817による搬送ホルダへの処理プロトコール(加熱処理や攪拌処理など)の指示が終了していることを確認して、本体貯留部への検体ホルダの移動を開始する(ストッパ816をOFFにする)。この際には、「<セルユニットの制御方法>」にて先述の方法等で、本体留置部への移動が行えるよう、あらかじめ搬送に要する各機構(ストッパ,分枝機構など)の制御方法が記憶されているものとする。
【0171】
なお、セルユニットの選択方法は、各セルユニットに均等に検体ホルダが搬入されるように搬送する方式が一例として考えられる。この方式においては、本体留置部に搬入された検体がセルユニット1110(a)に留置された場合、次の検体ホルダはセルユニット1110(b)に留置し、更に次の検体はセルユニット1110(c)に留置するというふうに、セルユニット1110(a)→セルユニット1110(b)→セルユニット1110(c)→セルユニット1110(a)→・・・の順に留置先を、サイクリックに切り替える。いずれかのセルが満杯となった場合には、満杯になったセルは留置先の候補から外すことにする。
【0172】
その他の方法としては、留置時間の残時間が同程度の搬送ホルダが同じセルユニットに搬入されるよう搬送する方式が考えられる。この場合には、留置時間が長い検体を保持するセルユニットは駆動させることなく安定して保管できるメリットがある。また、他の方法としては、セルユニットに配置された検体ホルダの留置残時間の合計が最小となるセルユニットに搬入されるよう搬送する方式や、検体ごとに行き先を固定する方式等が考えられる。いずれの方式で搬送するかについてはシステムの運用形態や搬送する搬送ホルダの総数などを比較考慮して決定することが望ましい。
【0173】
なお、これらの確認がされない場合には検体ホルダを本体留置部には移動させず、現在の位置で待機させる。
【0174】
(4)ステップ1440:検体に対する加熱を開始する。
ステップ1410により当該システムに投入された検体,ステップ1420により分注器による検体への試薬の分注が完了した検体に対し、近接通信手段による搬送ホルダへの加熱条件の指示がされたことを確認し、加熱開始命令を発する。
【0175】
加熱指示があった場合には、本体制御部によって指示された処理プロトコールに従って検体ホルダに設置された加熱機構を制御し、所望の温度変化を検体に与える。プロトコールに予め定められた加熱条件としては、「加熱温度」「昇温,降温条件」「加熱時間」といったパラメータが搬送ホルダのホルダ内制御部に記憶され、これに従って加温機構は検体の加熱処理を行う。
【0176】
これらの判断条件が全てOKとなった場合、他に異常検知等なければ加熱を開始OKとする。NGの場合には再度判断する。再度判断するタイミングとしては例えば、一定時間待って同じ判断を行うか、あるいは、判断条件に入っている内容に関連した命令やフラグの発行が行われるごとに再度判断する等の方法が考えられる。
【0177】
(5)ステップ1450:検体に対する加熱時間のカウントダウンを開始する。
ステップ1430によって本体留置部に移送された搬送ホルダは、本体制御部から指示された処理プロトコールに基づいて本体留置部で待機する時間が予め決定されている。本体制御部には、本体留置部での各搬送ホルダの留置時間を監視する留置時間監視機能(タイマーなど)が具備されおり、ステップ1440により検体の加熱開始後、前記留置時間監視機能は各検体について加熱開始から所定の時間が経過したことを監視する。即ち、ステップ1440で加熱が開始され次第、プロトコールに記載の加熱時間からカウントダウンを開始する。
【0178】
(6)ステップ1460:加熱終了フラグの発行。
処理プロトコールに定められた加熱時間が経過した検体には、前記留置時間監視機能によって、加熱終了フラグが付与される。加熱時間は、加熱開始命令が発行されたと同時にカウントダウンされ、残り時間が規定値(例えば30秒程度)以下になった、加熱が殆ど終わった段階で、検体毎に加熱終了フラグが付与される。
【0179】
(7)ステップ1470:本体留置部からの取り出し動作を開始する。
検体本体留置部(セルユニット)からの取り出しのアルゴリズムを以下説明する。判断条件、及び判断項目は以下の通りである。
○ループから取り出す条件
(A)加熱が、ほぼ終了していること(検体ステップ1460の加熱終了フラグが付与さ れていること)。
(B)ストッパ1022で停止している搬送ホルダの個数が一定以下であること(例えば 1個)。
(C)同一ループ内に、先に加熱処理が終了した検体がないこと。
○セルユニットから取り出す条件(ストッパ1022をOFFにして、搬送ライン930に検体を流す条件)
(A)搬送ライン930上に、他の検体が存在しないこと。
(B)分注器の待ち行列が一定数以下であること。
(C)他のセルユニット上に、ループから取り出され、かつ、セルユニットからは取り出 されていない検体で、かつ優先順位が自分より高い検体がいないこと。
【0180】
ここで、ループから取り出された状態とは、搬送ホルダがループ外、すなわち分枝機構1021よりも下流側にいる状態で、かつ、かつストッパ1022にて停止され、セルユニット外には出ていない状態を指す。
【0181】
優先順位は、先に加熱終了フラグが付与された検体を優先して順位付けられる。複数の検体に対して同時刻に加熱終了フラグが発行された場合には、あらかじめセルユニットの優先順位を定めておき(例えば、(c),(b),(a))、これに従って検体搬送の優先順位を定める。別の優先順位の設定方法としては、加熱終了フラグを付与した検体をより多く含むセルユニットの検体を優先するという方法も考えられる。
【0182】
(8)ステップ1480:加熱を終了する。
加熱終了フラグが発行されたあとも、加熱時間のカウントダウンを継続して行い、検体加熱時間が終了した場合には、検体ホルダに設置された加熱機構は加熱を停止する。
【0183】
(9)ステップ1490:検体を検体収容部に収納する。
全ての処理が終了した検体を搭載した検体ホルダは、検体収容部に収納される。異常検知以外特になし。異常検知とは、例えばどこかのストッパが故障して、本体収納部に移動できない等といった、異常な事項の有無を判定することを指す。当然、他の条件に対しても、必要に応じこのような条件は設定されているものとする。異常検知後の例外処理は、別途定められているものとする。
【0184】
尚、上記個々の条件が指示された際の、搬送ホルダ,搬送系,オンライン処理ユニットの制御方法については、予めいくつかのパターンが記憶されている事が望ましい。前記のパターンは、装置状況や処理プロトコールにおける設定等を引数とする可変のパラメータをいくつか持っていてよい。
【0185】
上記の個々の条件がOKの場合には、図14のフローチャートに従って、検体搬送処理が進んでいく。ステップ判断がNGの場合には、例えば、一定間隔で再度判断を行う、あるいは判断条件に入っている内容に関連した命令やフラグの付与が行われるごとに再度判断する等の方法が考えられる。
【0186】
尚、通常の分注直後には攪拌工程が入り、分注回数も数回であることが多い。攪拌工程が入る場合には、加熱条件と同様の方法で攪拌のタイミングを別途定義すればよく、分注回数が増える場合には、該当するステップを分注回数繰り返せばよい。
【0187】
本体処理部での検体処理の、個々の処理の開始,終了条件の決定方法にはFCFS方式以外にも様々な方法が考えられる。例えば、ジョブショップスケジューリング問題(例えば非特許文献4等)を応用した制御方式も考えられる。このような方式の一つの形態としては、本体留置部およびその周辺の搬送系,処理部及びその周辺の搬送系を、それぞれ一つのジョブショップと考え、本体留置部は搬送ホルダを留置できる個数だけ並列処理可能とした条件下で、例えば検体が投入部に投入された時点で、随時、待ち時間の総和や、全体の処理時間等を最小とするジョブショップスケジューリングを作成し、そのスケジュールに基づいて処理を進めていく方式が考えられる。
【実施例2】
【0188】
本発明の一つの形態を例として説明する。
【0189】
オンライン処理ユニットは多数の試薬を切り替えて分注可能な分注器とし、搬送ホルダは搬送ホルダごとに温調,攪拌を独立に制御できるものとする。尚、処理のアルゴリズムは、実施例1の方法とほぼ同様であるので、説明を略す。
【0190】
検体に対して典型的な検体処理工程、即ち、加熱,攪拌,分注の繰り返しからなる処理工程を実施するものとする。但し、検体毎(測定項目毎)に処理時間,分注間隔,加熱温度,攪拌タイミング,攪拌強度がまちまちであるものとする。また、処理プロトコールの加熱処理時間は、総じて長い傾向にあり、場合によっては、加熱中に攪拌をしつづけるプロトコールもあるとする。
【0191】
まず、本発明の搬送ホルダは、搬送ライン上で加熱,攪拌をいつでも行うことができ、かつ搬送ホルダごとに独立の条件で制御できる。多くの検体処理は、分注,攪拌,加熱のみを繰り返す工程を含むが、このような場合においても、加熱,攪拌は搬送ホルダ上でできるため、搬送経路としては、分注器と、本体留置部との間の搬送経路のみを考えればよい。従って、搬送経路,搬送制御は極めて単純である。
【0192】
また、同じ分注器を使いまわすことができるので、必要となる分注器の台数が少なくて済む。
【0193】
また、分注するタイミングにおいてのみ、本体留置部から取り出し、分注が終わればただちに本体留置部に戻せばよいので、分注器、従来の逐次処理型とほぼ同様に、検体ごとに、必要な試薬を分注していくのみでよく、分注器の制御も簡単である。
【0194】
分注器と、本体留置部との間の搬送ホルダのやりとりは必須であるが、分注1回に要する時間は、加熱時間に比べ極めて短いため、本例のような配置にすれば、処理時間に与える影響は殆どない。万一、分注器に対して大量の検体がつかえるようなことが想定される場合には、分注器の数を増やし、並列処理にしてもよい。
【0195】
また、本体留置部から所望のタイミングで検体を取り出す手順も、前述のように、基本的には分枝機構と、ストッパのタイミング制御のみで尽きるため、比較的単純である。
【0196】
さらに、このような場合でも、前記本体留置部は、前記の手順によると、所望のタイミングで、所望の検体のみを、搬送ホルダに装着したままの状態で取り出すことができ、かつ、搬送ホルダは、ベルトラインから離れることなく取り出すことができるので、どのタイミングにおいても、加熱,攪拌を途切れることなく行える。従って、反応制御がより細かくできる。
【0197】
また、搬送手段,取り出し手段,留置手段は、ベルトラインと、周辺機能(分枝機構やストッパ,ベルトラインの駆動制御回路等)のみで全て実現可能であり、従って移載器を必要としない。従って容器を移載器のチャック機構で掴み、搬送ホルダから取り出し、バッチ型の加熱装置や攪拌装置に装着し、さらに処理が終わった後に、加熱装置や攪拌装置から取り出し、さらに搬送ホルダに戻すといった手間が不要である。この手間は、制御アルゴリズムを複雑化するだけではなく、処理時間が、移載器の処理速度に律束されることになる。そのため、スループットの観点から不利であり、また、移載器を用いた移載は、容器を宙釣りにするため、特に容器が高温である場合や、逆に結露が生じている場合には、事故のリスクが考えられる。これに対して本実施例に開示された自動検体処理装置では、処理の過程でチャック機構を用いた検体移載工程がないため、スループットの観点およびリスクの観点からもバッチ方式による加熱・攪拌機構を用いる場合に比べ有利である。
【0198】
スループットの観点から分注器の台数を増やす必要がある場合には、分注器を並列に並べて、到着順に交互に分注器を使い分ける方法や、一つの搬送ラインに複数の分注器を直列並べる方法などが考えられる。分注器を直列並べる場合の一例として、分注器を例えば2つ並べた場合には、2つの検体を到着順に同時に分注器にセットして、2つとも処理が終わった時点で、次の2つを、到着順に同時に分注器にセットする等の処理方法が考えられる。
【実施例3】
【0199】
本発明の自動検体処理装置が有効な他の具体例として、検体中の特定の物質に対して、選択的に吸着する磁性ビーズを用いて、検体中の特定の物質を濃縮,分離する場合であって、特に複数の容器間で磁性ビーズを移動させる工程を実現する場合を説明する。尚、処理のシーケンス,全体のワークフローは、実施例1の方法と同様なので、説明を省略する。
【0200】
磁性ビーズの移動を用いた物質の濃縮が行われる場合の一例としては、磁性ビーズによる核酸分離手段等が考えられる。磁性ビーズによる核酸分離手段としては、よく、5本の容器に検体や試薬をいれておき、その間で、磁性ビーズや反応液を移動させる方法が取られる。大まかには、以下のような工程が取られる(例えば特許文献7,8,非特許文献1)。
(1)ステップ1:第1の容器に、血液等の検体と、Lysis Bufferや、Protease K等の核酸を水溶させるための試薬等を混ぜ合わせる。
(2)ステップ2:適当な条件で一定時間、加熱することで核酸水溶液(この溶液にはタンパク質等の不純物が多く含まれる)を作る。
(3)ステップ3:核酸水溶液を、第2の容器から吸引し、第二の容器に吐出する。その後第3の容器に核酸分子と吸着する性質を持つ磁性ビーズを混合する。
(4)ステップ4:適当な条件で攪拌・加熱させて、前記磁性ビーズと核酸粒子が結合させる。
(5)ステップ5:その後、第二の容器から、磁性ビーズを捕獲する。並行して第三の容器には洗浄液を分注する。これらの作業の後、磁性ビーズを第三の容器に分散させる。
(6)ステップ6:その後、適当な条件で第4の容器を加熱・攪拌する。この結果、磁性ビーズ等に付着した不純物は、洗浄液中に分散あるいは溶出する。
(7)ステップ7:第4の容器に洗浄液を分注する。
(8)ステップ8:第三の容器および第四の容器を用いた作業によって、核酸を吸着した磁性ビーズ等から不純物を洗い落とされる。
(9)ステップ9:最後に第五の容器に、シリカと核酸の吸着を切るためカオトロピック塩の濃度を下げられる環境を入れておき、この中に攪拌棒によって第四の容器から回収された磁性ビーズを分散させ、必要に応じ適当な条件で加熱・攪拌させる。その後、攪拌棒で再度磁性ビーズ(核酸との吸着が切れた磁性ビーズ)を回収すると、第五の容器内には、高濃度,高純度の核酸溶液が得られる。
【0201】
即ち、典型的な磁性ビーズによる核酸分離手段においては、5本の容器の間で、反応液や磁性ビーズを移動させながら、核酸分離を行うため、本発明の形態の装置においては、5本の容器を1セットとして搬送する手法が、管理面で効率が良い。
【0202】
従って、本実施例における搬送ホルダ(5本ラック)は、5本の容器を同時に装着でき、それぞれの検体を独立に加熱,攪拌する機構が搭載されているとする。また、当然、本体留置部,本体処理部,本体制御部は具備していて、本体留置部,本体処理部を構成する搬送ラインを含む全ての搬送ラインは、5本ラックを搬送できるよう設計されているものとする。
【0203】
また、本体処理部のオンライン処理ユニットとしては、前記5本ラックに装着された容器間で、磁性ビーズを移動する手段と、分注器と、開栓器を具備している場合を一例とする。
【0204】
本発明の形態における5本ラックの構造,構成について説明する。本発明の形態における図15に5本ラック断面を模式的に示す。図16に、前記5本ラックの検体装着部全てに容器を装着した状態を示す。
【0205】
本発明の形態における5本ラックは、5つの検体装着部1510(a)−(e)を具備している。
【0206】
また、それぞれの検体装着部それぞれに、温度調節素子1520(a)−(e)と、攪拌素子1530(a)−(e)を、それぞれ一つずつ具備している。
【0207】
図16においては、5つの検体装着部1510(a)−(e)に、容器1610(a)−(e)がそれぞれ装着されている。
【0208】
また、それぞれの温度調節素子と、攪拌素子を制御するための制御部を具備している。
【0209】
さらに、搬送ホルダ下部の外周には、図1の搬送ホルダと同様のホルダ電極2種類が、それぞれ、搬送ホルダの周りを1周するように具備されている(図示しない)。
【0210】
さらに、図1の搬送ホルダと同様の電源部や、近接通信手段が具備されている。これらの役割については、図1の搬送ホルダと同様なので、詳細な説明を略すが、5つの温度調節素子,攪拌素子はそれぞれ独立に制御可能であるものとする。
【0211】
また、搬送ホルダにおいては、磁性ビーズを混入した容器を装着する予定の容器装着部には、磁性ビーズを分散させるための磁場を印加する機構が備わっていても良い。
【0212】
本発明の本体処理部,本体留置部等を構成する搬送ラインの配置は、本体処理部は図8、本体留置部は図11と同様である。但し、5本搬送ラックは、縦方向と横方向の長さが異なるため、搬送ラインの幅は、縦方向の搬送ラインと横方向の搬送ラインとでは当然異なるものとせねばならない。本実施例の形態では搬送ライン810,搬送ライン1040及びの方向を横方向とし、搬送ライン930及び800の方向を横方向とする。即ち、本体処理部に前記5本搬送ラックが装着され、5本搬送ラックがストッパ816によって停止させた状態においては、搬送ラインの下流側から眺めた場合に、左から順に検体装着部1510(a)−(e)の順に並ぶものとする。
【0213】
図17に本発明の形態において使用される栓(磁性ビーズ捕獲栓)を装着した容器の模式図を示す。この栓は、磁性ビーズ捕獲において、重要な役割を担う。このような栓は、5本の容器のうち、少なくとも1つの容器に装着されるものとする。
【0214】
本発明の磁性ビーズ捕獲栓は、試験管容器等の栓として使われる通常のゴム栓と同様の構造をした、可撓性の樹脂で作成された部分(可撓部1700)を具備している。可撓部は、通常のゴム栓と同様の原理で、容器に蓋をする。本発明の磁性ビーズ捕獲栓は、前記可撓部に、樹脂で作成された筒1710を貫通させた形態をとっている。
【0215】
筒1710は、内部に中空部1720を持ち、上端に開口部1721をもち、内部の中空部に侵入する手段は、上端の開口部1721のみである。栓の中空部には、細い棒で、先端部に磁石1910が装着された棒(磁石棒1900)を挿入することができる。図19に、磁石棒を容器に装着した磁性ビーズ捕獲栓の中空部に挿入した状態を示す。
【0216】
容器内の溶液中に磁性ビーズ等の磁性ビーズ1820が分散している場合、磁性ビーズ捕獲栓を容器に装着した状況下において、磁石棒1900を挿入すると筒1710の先端を貫通する磁束の本数が多くなるため、磁石棒の先端に磁性ビーズが付着する。
【0217】
この状態で、図20のように磁性ビーズ捕獲栓を抜き、隣の容器に装着すると、隣の容器に磁性ビーズが移動する。この状態で、磁石棒1900のみを抜くと、磁石棒1900から、磁性ビーズが筒から離れる。
【0218】
尚、好ましくは、磁性ビーズ捕獲栓の可撓部は柔軟で、筒部をある程度自由に傾けることができることが望ましい。図21に、筒部を傾けた状態を示す。このように、筒部を自由に傾けることができるようにすることで、磁性ビーズの捕獲やリリースが、より確実に行えるようになる。
【0219】
容器1610(a)−(e)のうち、容器1610(a)には全血または血清等の検体が入っていて、前記の磁性ビーズ捕獲栓が、あらかじめ装着されている。容器1610(b)−(e)は、あらかじめシール栓で栓されているものとする。この場合には容器1610(b)−(e)のシール栓を開栓する機能(シール開栓器)がオンライン処理ユニットに具備されている必要がある。尚、容器1610(b)−(e)には、あらかじめ何らかの試薬が入っていてもよい。
【0220】
本形態における自動検体処理装置は、磁性ビーズを移動する手段を実現するために、オンライン処理ユニットは以下の特徴を具備した磁性ビーズ捕獲ユニット(図示しない)を具備している。
(1)磁性ビーズ捕獲栓の可撓部の外側をチャックする機構と、容器外壁をチャックする機構。
(2)チャック機構それぞれが可撓部外側と、容器外壁をそれぞれチャックした状態において、磁石棒を筒内に挿入または持ち上げる手段。
(3)栓を容器に装着(閉栓)する手段および容器から取り外す手段(開栓)。
【0221】
さらに好ましくは、以下の(4)を備えていても良い。本実施例では備えているものとする。
(4)チャック機構それぞれが磁性ビーズ捕獲栓の可撓部の外側と、容器外壁をそれぞれチャックした状態で、筒先端が容器内で検体溶液に浸された状態において、筒部を自在な方向に傾斜させる手段。
【0222】
本発明の形態におけるオンライン処理ユニット815は多数の試薬を切り替えて分注可能な分注器を具備している。この分注器は容器内の検体溶液を吸引・吐出することも可能とする。
【0223】
さらに、分注器と磁性ビーズ捕獲ユニット、開栓器は、本体処理部のある特定部分に停止した5本ラックのどの搬送ホルダに装着された容器にも、交互にアクセス可能である。
【0224】
以下、本形態におけるオンライン処理ユニットの動作を、容器1610(b)に、磁性ビーズが入っていて、容器1610(b)から容器1610(c)に磁性ビーズを移動する工程を一例として説明する。この動作はストッパ816の位置に停止した状態で行われる。また、磁性ビーズ捕獲栓は容器1610(b)に装着された状態を前提としている。
つまり、もともと容器1610(a)に装着されていた磁性ビーズ捕獲栓が容器1610(b)に装着しなおされ、現在は容器1610(b)に装着された状態を前提とする。この動作も、以下に説明する方法と同様の方法でできる。
(1)ステップ1:シール開栓器が容器1610(c)にアクセスし、容器1610(c)のシール栓を開栓する。
(2)ステップ2:必要に応じ、分注器を容器1610(c)にアクセスさせ、必要な試薬を容器1610(c)に注入する。
(3)ステップ3:磁性ビーズ移動手段のチャック機構で容器1610(b)と、磁性ビーズ捕獲栓をそれぞれチャックし、栓の中空部に磁石棒を挿入し磁性ビーズを磁石棒に対し磁気的に吸着させる。
(4)ステップ4:ステップ3の状態で、容器1610(b)を開栓する。
(5)ステップ5:磁性ビーズ移動手段のチャック機構で容器1610(c)をチャックし、前記磁性ビーズ捕獲栓を、容器1610(c)に装着する。
(6)ステップ6:ステップ5の状態で、磁石棒を抜く。
【0225】
上記ステップ1〜6によって、磁性ビーズを隣の容器に移動させる工程が実現できる。
他の組み合わせにおいても同様に磁性ビーズの移動作業ができる。また、容器内で反応を行い、反応の結果が後工程の検査において問題となる容器、即ち、外部からコンタミネーションが発生すると問題となる容器には、全て、栓がなされているためコンタミネーションの回避が可能である。例えば、容器1610(c)から、磁性ビーズを容器1610(d)に移動させた後には容器1610(d),(e)にコンタミネーションが生ずるとその後の工程に影響を及ぼす。容器1610(c)から磁性ビーズを容器1610(d)に移動させた後には容器1610(a)−(c)は、必要に応じて保管することも考えられるが、通常は、この後直ちに破棄しても問題ないものである。容器1610(a)−(c)にも栓をすることが望ましい場合には、別途閉栓器を設け、必要に応じ、適当な栓を用いて閉栓すればよい。
【0226】
ホルダごとの処理シーケンスは、実施例1の場合と同様で、前記処理プロトコール(1)〜(9)を、ストッパやオンライン処理ユニットの動作シーケンスに変換した形で本体制御部に記憶させておけば、上記(1)〜(6)のような処理シーケンスが実現される。
従って、搬送経路の肥大化の防止や逐次処理の実現等のメリットが発生する。
【0227】
さらに、従来のバッチ方式では、磁性ビーズの移動工程は、隣に別の検体が存在する状況で行われるのが普通であったが、本例の方法では、スループットが確保でき、且つ隣に他の検体がないためクロスコンタミネーションのリスクは大幅に下がる。
【0228】
また、開栓と、ビーズ移動を同一のアクチュエータで行えるためアクチュエータの数が節約できる。さらに、磁性ビーズの移動時に用いられる、磁石と反応液との直接的な接触を防止させるための樹脂製の筒は、1セットの処理に対して1つですむため、消耗品の節約,感染性廃棄物の低減ができる。
【0229】
磁性ビーズの捕獲手段の他の形態としては、たとえばボールペンのノック機構等と同様の機構で磁石を上下させる手段具備した棒を用いた捕獲手段が考えられる。前記棒の先端部には、プラスチック又はゴムのカバー着脱できるものとする。このようにすると、磁石は、プラスチック又はゴムのカバー内を移動でき、磁石を突き出した状態では、カバーを透過した磁場によって、磁性ビーズがカバー表面に磁気的に吸着し、引っ込めた状態では、カバーを透過した磁場が殆どないため、カバーに吸着した磁性ビーズはカバーから離れる。このような形態をとると、カバーは、検体と触れるため、随時使い捨てることが望ましい。カバーの着脱は、通常の分注器のディスポーザルチップと同様の方法で着脱することが考えられる。
【0230】
場合によっては、先端部を、ディスポーザルとせず、例えば、高濃度(〜1M)の塩酸等、核酸分子を数塩基程度のフラグメントに分解することができる液体で洗浄して、再利用してもよい。
【0231】
このような機構を備えた棒を、ロボットアーム等の先端に取り付け、ストッパなどによりベルトライン上に停止した容器にアクセスできるものを、磁性ビーズ捕獲手段として用いても良い。
【実施例4】
【0232】
本発明の自動検体処理装置において、オンライン処理ユニットとして、ターンテーブル型の光学測定装置を具備した場合の構成と、応用例を以下に説明する。尚、処理のシーケンスについては、実施例1の方法をアレンジすればよいため説明を省略する。また、これまでの実施例と同様のメリット、例えば搬送経路の肥大化の防止や逐次処理の実現等については説明を省略する。
【0233】
図22に、本例の本体処理部の構造を示す。本発明の形態の本体処理部は、コの字状に接続された三本の搬送ライン2210,2220,2230と、複数の検体を搬送ホルダごと円周上に保持して回転移送させるターンテーブル2250と、ターンテーブル上の検体に対して吸光度や散乱光,発光などを測定可能な光学測定装置2260と、コの字状に接続された搬送ラインから容器を取り出すための搬送ライン(接続ライン)2240と、前記接続ラインに搬送ホルダを導入するための分枝機構から構成されている。
【0234】
三本の搬送ライン2210,2220,2230の搬送ラインの上流側から下流側に向かってこの順番に、コの字状に接続されている。これらの搬送ラインは一方通行である。
直線搬送ライン2220には、接続ライン2240と接続するための接続部が設けられている。接続ライン2240は、双方向に動作可能で、接続ライン2240と接続していないほうの末端は、ターンテーブル2250と接続されている。搬送ライン2230の上流側末端は、図11の本体留置部の搬送ライン910と接続され、搬送ライン930の下流側末端は本体留置部の搬送ライン930と接続されている。
【0235】
即ち、ターンテーブルが停止したタイミングで、ターンテーブル上に搬送ホルダが設置されている場合にはターンテーブルから容器を取り出し、ターンテーブルに搬送ホルダが設置されていない場合には、ターンテーブルに新たな容器を装着することができる。好ましくは、接続ライン2240からターンテーブルへ搬送ホルダを押し込む、あるいはターンテーブルから接続ライン2240へ搬送ホルダを引っ張り出すためのアームを有していてもよい。ターンテーブルには、本発明の搬送ホルダを着脱自在に固定でき、かつ、ターンテーブル上に固定された搬送ホルダに対する処理を継続することができる。ターンテーブルには搬送ホルダに対する電力供給手段等が備わっていても良い。ターンテーブルの脇には、容器中に収容された検体からの透過光量や散乱光量,発光強度を測定できる光学測定装置が具備されている。
【0236】
このような構成のメリットを、Reverse Transcription-PCR(非特許文献2)の一形態に応用する場合を一例に説明する。簡単のため、ワンステップReverse Transcription-PCR(RT−PCR;逆転写ポリメラーゼ反応)を用いて、RNAの発現量を調べる場合について説明する。ワンステップRT−PCRは、Reverse Transcription(RT)の工程、即ち、RNAポリメラーゼ等を用いて、complementary DNA(cDNA)を合成(逆転写)する工程と、Polymerase chain reaction(PCR)の工程、即ち前記cDNAをPCR増幅する工程の二段階から構成されている。ここで、ワンステップとは、前処理の段階において、RT工程及び、PCR工程に必要な試薬を全て分注しておき、RT工程及び、PCR工程の途中で一切新たな試薬の分注を必要としない方式のことである。
【0237】
RT−PCRの所要時間は、RT工程が数時間程度、PCR工程が数時間程度と比較的長い。
【0238】
また、RT工程の実施は、特にワンステップ方式の場合には温度調節だけでよく、その間、光学測定の必要性はない。
【0239】
そのため、RTの工程を本体留置部で行い、この工程が終わり次第、PCRの工程を、ターンテーブルに呼び出して行えばよい。
【0240】
尚、RT反応後、あるいはRT反応中に新たな試薬を分注する必要がある場合等には、本体処理部において、ターンテーブルと並列に、分注器等の配置をする等の方法をとればよい。
【0241】
このようは、本発明の装置においては逆転写の工程が終わるまでの間は本体留置部で搬送ホルダに具備された検体処理機能で、RT反応を進行させることができるため、RT反応中には光学測定器を占有する必要がなく、従来法に対して、高価な光学測定装置の占有効率などが大幅に高くなり、装置の原価低減の面において極めて有利となる。
【実施例5】
【0242】
本発明の自動検体処理装置において、オンライン処理ユニットとして、ターンテーブル型の光学測定装置を具備した場合の構成と、別の応用例を説明する。尚、これまでの実施例と同様のメリット、例えば搬送経路の肥大化の防止や逐次処理の実現等については説明を省略する。
【0243】
PCR工程そのものも、時間を要する工程である。ここで、PCRの処理工程(非特許文献2,3)を簡単に要約する。PCRは、DNA溶液にDNAポリメラーゼおよびDNA合成の素材(基質)であるデオキシヌクレオチド三リン酸(dNTP),酵素が働く至適塩濃度環境をつくるためのバッファー溶液,増幅したいDNAの量に応じて発光するプローブ等を加えて生成した反応液に対し、熱変性,アニーリング,伸長の3段階を30〜40サイクル繰り返すことで、DNAを抽出あるいは合成し、自分の望んだ特定のDNA断片(数百から数千塩基対)だけを選択的に増幅させる手法である。
【0244】
熱変性とは、反応液を94℃程度に加熱した状態を30秒から1分間程度保ち、2本鎖DNAを1本鎖に分かれさせる処理を言う。
【0245】
アニーリングとは、熱変性させたあとの反応液を60℃程度にまで急速冷却し、1本鎖DNAとプライマーを結合させる処理を言う。
【0246】
伸長とは、アニーリングの後にプライマーの分離がおきずDNAポリメラーゼの活性に至適な温度帯(60〜72°C程度)まで、再び反応液を加熱し、DNAポリメラーゼによりDNAを合成する処理を言う。
【0247】
つまり反応液に対して3段階の温度を周期的にサイクルする必要がある。本発明の搬送ホルダには、温度調整素子と温度調整シーケンスを記憶可能な制御部が具備されているため、これらの機構によって搬送ホルダ毎に独立して処理を実施するように制御すればPCRが実現可能である。なお、PCR反応専用の装置として用いる場合には、搬送ホルダの攪拌機構は備わっていなくても良い。
【0248】
さて、PCR反応には以下の特徴がある。
(A)PCR反応の増幅には2時間程度を要し、反応時間が極めて長い。
(B)反応曲線がS字型を取り、S字カーブの変曲点付近が重要な情報を持つ。さらにS字カーブは変曲点直前から急に立ち上がり、比較的短い時間で飽和状態に達する。
【0249】
従って、光学測定を行うタイミングは、S字カーブの変曲点付近に限定することができれば少なくとも光学測定装置の占有効率が向上する。
【0250】
また、目的の反応曲線の概形は、異常な事例を除き、よく研究されていて(例えば特許文献9,非特許文献3等)ロジスティック回帰分析で用いられるようなシクモイド関数やダブルシクモイド関数等のS字カーブといわれる類の曲線がPCR反応のモデル曲線として知られている。
【0251】
従って、立ち上がり始める前の反応曲線情報や、飽和した後の反応曲線情報が欠落していても、S字カーブの立ち上がり前後から飽和前後までの反応曲線が測定されていれば、フィッティングによって全体の反応曲線を復元することができる。S字カーブが急激に立ち上がるまでに必要なサイクルは、一般的には熱変性・アニーリング・伸長のサイクルを少なくとも10回程度繰り返す。従って、最初の10サイクル程度は光学測定しなくとも反応曲線を復元することは十分可能である。
【0252】
特に、ゲノムDNA中の特定塩基配列(遺伝子)の発現量を測定する場合には、反応曲線が立ち上がり始める時間はある程度予想できる。ゲノムDNAをルーチンで検査する場合には発現のパターンがある程度分かっているものを検査することが多いためである。従って、反応曲線が立ち上がり始めるまでに要するサイクル数をあらかじめ知っておき、反応曲線が立ち上がり始めると予想されるタイミングで搬送ホルダを光学測定用ターンテーブルに搬送する方法も可能である。
【0253】
本発明の本体留置部は、所望のタイミングに近い条件で、所望の検体のみを取り出すことができるため、光学測定したい検体を本体留置部から取り出してターンテーブルに搬送し、光学測定が完了した検体はターンテーブルからおろしたいタイミングで本体留置部に戻すことができる。
【0254】
上述のようなターンテーブル型のオンライン処理ユニットを備えることによって、有利な点は、一つの光学測定装置あるいは少数の光学測定装置で、複数の検体に対して、定期的に光学測定できることである。とくに、PCRなど一定の時間間隔で光学測定を行う必要がある検体については、このようなオンライン処理ユニットを備えることは有効であるため、以下にPCR反応を用いた遺伝子検査を本実施例における装置で実現する場合の制御方法を説明する。
【0255】
また、反応が飽和状態に達した場合には、光学測定をやめても反応曲線の測定には影響しないため、このような検体を保持した搬送ホルダを光学測定用ターンテーブルから搬出する制御方法も実現可能である。
【0256】
上述のPCR反応を本発明における検体検査システムで実現する場合の処理プロトコールを以下に述べる。
(1)ステップ1:測定項目毎に反応曲線が立ち上がるまでに要する時間をあらかじめ記憶しておく。
(2)ステップ2:反応曲線が立ち上がる時間に達していない検体は、本体留置部でサーモサイクリングを実施して反応を進行させる。
(3)ステップ3:オンライン処理ユニットへの移動時間を考慮し、反応曲線の立ち上がり時間に達した検体を本体留置部から取り出して、オンライン処理ユニットへと搬送し、ターンテーブルに搬送ホルダごと移載する。
(4)ステップ4:反応曲線を復元するにあたり充分な測定点が得られたのち(カーブが立ち上がり始めてから10サイクル程度)、検体をオンライン処理ユニットから搬出して光学測定を中止する。
(5)ステップ5:得られた測定データにモデル曲線をフィッティングすることで、全体の反応曲線を得る。
【0257】
本実施例においては、本体留置部や本体処理部以外の、搬送路でもターンテーブル上でもサーモサイクリングが可能である。もし搬送中にサーモサイクリングが途切れ、検体の温度が一定以下に下がった場合には、非特異な反応が発生し、得られる反応曲線に影響を与えることが良く知られている。
【0258】
なお、ターンテーブルのように少数の光学測定装置で多数の検体の光学測定を行う手段は、PCR反応の反応曲線を取得するような場合、とくに、反応過程のうち一部の領域について全サイクルに渡って反応曲線の測定が望まれるような場合において、あまり有効ではないというふうに考えられるかもしれない。しかし、光学測定データが意味を持つのはサイクルの中の特定のタイミングのみである。この理由は、プローブの発光量が反応液の温度に依存することによる。熱変性過程などのようにDNAが1本鎖に乖離した状態においてはプローブの発光量は、所望の塩基配列の増幅量の指標としては全くあてにならない。従って、ターンテーブルを用いた間欠的な光学測定であっても、有効なタイミングで光学測定データを得るよう制御すれば、必ずしも全サイクルに渡って光学測定することを阻害しない。
【0259】
また、1つの検体のPCR検査をするにあたっては、等価な検体(本来ならば全く同じ結果が出なければならない検体)を並行して複数(一般的には3検体程度)同時にPCR検査するのが通常である。
【0260】
簡単のため、3本の同一検体を並行してPCR検査する場合を一例として考える。これら三本の検体をそれぞれ検体A,検体B,検体Cとする。この場合に本実施例の自動検体処理装置を用いて反応曲線を取得する方法を説明する。
【0261】
(1)ステップ1:検体A,B,Cを投入して本体留置部に搬送する。
(2)ステップ2:いずれの検体も反応曲線が立ち上がるまでに要する時間まで本体留置部でサーモサイクリングを実施する。
(3)ステップ3:検体Aの反応曲線の立ち上がり時間になったら、検体Aをオンライン処理ユニットのターンテーブルに搬送して、光学測定機構での定期的な計測を開始する。
(4)ステップ4:検体Aの反応曲線が実際に立ち上がった後に、検体B,Cも同様にオンライン処理ユニットのターンテーブルに搬送して、光学測定機構での定期的な光学測定を開始する。
(5)ステップ5:検体A,B,C共に、反応曲線を復元するのに充分なサイクル時間、光学測定する(10サイクル程度)。
【0262】
尚、検体Aは反応曲線の立ち上がりを確実に測定するために、予想される立ち上がり時間に対しある程度の裕度を見込んでターンテーブルに投入される。そのため、数サイクル程度は反応曲線が立ち上がらない測定を行うこととなる。これに対し、検体Bおよび検体Cについては、検体Aの立ち上がりを検知した後にターンテーブルに投入されるため、無駄な測定を行わずに済む。
【0263】
検体Bおよび検体Cについては、反応曲線の立ち上がり直後の1〜2サイクル程度は、測定できないことになり、信頼性はAに比べてやや落ちることになる。しかし、検知B・Cの反応曲線を測定する目的は、検体Aの反応曲線の妥当性確認であり、検体Aと一致しているか否かを判定できれば充分であるため、大きな問題にはならない。
【0264】
上記の方法を取ると、反応曲線が立ち上がるまでの初期の10サイクル程度は検体留置室で反応を継続させ、反応曲線が立ち上がってから充分な測定点が得られるまではターンテーブル方式のオンライン処理ユニットで光学測定する。そののちに、反応を打ち切るか、ターンテーブル以外の場所で反応を継続させるため、一つの検体が光学測定機構やターンテーブルを占有する時間を少なくすることができる。自動検体処理装置において単にターンテーブルを組合せたのみでは、検体の個数が多くなった場合に、ターンテーブルの半径が大きくなり、空間的効率が悪くなってしまうが、本実施例の方式を採用することによって、光学測定機構やターンテーブルといった機構を効率的に活用できる。
【実施例6】
【0265】
本実施例では、濃度が未知であるDNA溶液のPCR検査に対しても、効率がよく、信頼性の高い反応曲線を得ることができる。反応曲線から、増幅したいDNAフラグメントの発現量を測定する場合には、一般的に既知濃度のコンペティタと同時にPCR増幅する競合法が用いられる。
【0266】
競合法を行うためには、濃度が既知のDNA(DNAコンペティタ)数種類用意する。
ここでは、希釈系列として、7種類のDNAコンペティタを用意し、濃度の高いほうからA,B,C,D,E,F,Gとする。各DNAコンペティタの濃度は、互いに10倍ずつ希釈する。例えばAはBより10倍濃度が高く、BはCより10倍濃度が高い。本例では7種類のDNAコンペティタを用意したが、DNAコンペティタの個数は本実施例の数に限られず、濃度比も本実施例と異なっていても良い。また、測定対象のDNA溶液の濃度はAよりも薄くGよりも濃いことが推定できているとする。
【0267】
さて、希釈系列A,B,C,D,E,F,Gの各々は、いずれもDNAである。従って、これらを全て同じ容器に加えた場合、いずれもがdNTPを消費するに従って、互いに反応曲線の形状に影響を与え合う。特に、最も濃度の低いDNAコンペティタ;Gについては、AやBと同時にPCR反応をした場合、反応曲線の形状が本来の形状とは大きくずれることが懸念される。当然、本来測定したい、検体由来のDNAの反応曲線も、影響を受けることを免れない。この事実は、PCR反応の定量性に懸念を与える。
【0268】
そこで、本実施例では、同一の検体から抽出されたDNA抽出液をイ,ロ,ハの3つの容器に分注したものを用意する。イには、DNAコンペティタA,B,Cを加え、ロには、DNAコンペティタC,D,Eを加え、ハにはE,F,Gを加える。つまり、希釈系列A,B,C,D,E,F,Gにおいて、濃度の高いほうから3種類ずつイ,ロ,ハの容器に分注し、イとロの間にはCが重複して分注され、ロとハの間にはEが重複して分注されていることとなる。また、イ,ロ,ハの容器それぞれには、検体DNAを増幅検出するのに必要なプライマーやDNAポリメラーゼや、プローブが適切に分注されているものとする。また、プローブの発光色を増幅するDNAごとに変えておくことで、反応曲線の識別ができる。
【0269】
従来のPCR装置においては、反応曲線の測定を行うにあたり、イ,ロ,ハ全ての反応曲線を、全サイクルにわたって光学測定する必要がある。従って光学測定装置を一つの容器が占有する割合が高かった。
【0270】
本例では、以下の手順で、イ,ロ,ハの容器を検体処理システム内に搬送することで、少ない光学測定機構を備えつつ、全ての反応曲線を測定することを可能とする。
(1)ステップ1:検体処理システムに投入された検体イ,ロ,ハを本体留置部へと搬送する。
(2)ステップ2:検体イについては、反応曲線が立ち上がるまでに要する時間をあらかじめ予想しておき、この間は本体留置部でサーモサイクリングを実施する。検体ロ,ハも検体イと同時に本体留置部でサーモサイクリングを開始する。
(3)ステップ3:検体イの反応曲線の立ち上がりが予想されるタイミングで検体イを本体留置部から搬出して本体処理部に投入し、PCR光学測定を開始する(検体搬送路上および本体処理部においてもサーモサイクリングを継続する)。
(4)ステップ4:検体イのコンペティタDNA:Bの反応曲線が立ち上がった直後に、検体ロを本体留置部から搬出して本体処理部に投入し、PCR測定を開始する。
(5)ステップ5:検体イのコンペティタDNA:Cの反応曲線が立ち上がっても、検体DNAの反応曲線が得られない場合には、検体イを本体処理部から排出する。
(6)ステップ6:検体ロのコンペティタDNA:Dの反応曲線が立ち上がった直後に、検体ハを本体留置部から搬出して本体処理部に投入し、PCR測定を開始する。
(7)ステップ7:検体ロのコンペティタDNA:Eの反応曲線が立ち上がっても、検体DNAの反応曲線が得られない場合には、検体イを本体処理部から排出する。
(8)ステップ8:検体ハのコンペティタDNA:Gの反応曲線が立ち上がってから充分時間がたっても検体DNAの反応曲線が得られない場合には、検体ハを本体処理部から排出する。
【0271】
上記の(1)〜(8)のステップを行うことによって希釈系列A,B,C,D,E,F,G全ての反応曲線の立ち上がり時点の波形を、光学測定装置を占有することなく測定できる。検出したいDNAの発現量がAよりも少なく、Gよりも多い場合には、上記の測定方法でもイ,ロ,ハの少なくともいずれかの測定中には反応曲線の変曲点付近の10点程度の重要な測定点の測定ができる。
【0272】
従って、そのような容器、すなわちイ,ロ,ハのいずれかにおいて必要に応じて、全反応過程の反応曲線を、モデル曲線のフィッティングから復元した後、通用のリアルタイムPCR法と同様の手法を用いることで、検体DNAの発現量を特定できる。
【実施例7】
【0273】
例えば、実施例2,3等において、全ての反応が室温で進行する場合等には、搬送ホルダは、検体処理機能を具備する必要がないこともありえる。また、例えば実施例3の5本ラックでは、例えば1本目の検体容器のみ、加熱処理が必要である場合には、検体装着部1510(a)のみに、独立制御可能な加熱機構を装着するという構成も考えられる。さらに、図10のように、多数のセルユニットを装着する場合、セルユニットの1つのみに、搬送ホルダとの通信機能を付与し、このセルユニットのみで搬送ホルダを用いた検体処理を行う構成も考えられる。
【符号の説明】
【0274】
100 容器保持部
110 ホルダ内制御部
120 容器保持部
130 搬送ホルダ外壁部
140 上側のホルダ電極
150 下側のホルダ電極
300(a)−(f) 容器保持部の外壁(平面図において、反時計まわりに(a),(b),…(f)の順に符号を付す。)
310(a)−(f) 温度調節素子(平面図において、反時計まわりに(a),(b),…(f)の順に符号を付す。)
320(a)−(f) ヒートシンク(平面図において、反時計まわりに(a),(b),…(f)の順に符号を付す。)
340 A−A線
400 容器保持部の中心軸
410 制御回路
420 電源部
430 攪拌素子
440 搬送ホルダ底部
450 近接通信手段
500 床
510 搬送ベルト
520(a),(b) 壁
530(a),(b) 絶縁材
540(a),(b),550(a),(b) ガイド電極
560,817,1231 近接通信手段
700 本体処理部
710 本体留置部
720 本体制御部
730 本体投入部
740 本体収納部
750 通信ライン
800,810,820,910,920,930,940,1000,1010,1020,1030,1040,1200(a)−(d),1210,1220,1230,1300(a)−(d),1310,1320,1330,2210,2220,2230 搬送ライン
911 投入ライン
935 収納ライン
801 搬送ライン800の搬送方向
802 搬送ライン800の上流側末端
815 オンライン処理ユニット
816,912,913,931,941,1001,1011,1022,1023,1121(a)−(c),1201(a)−(d),1301(a)−(d),1331 ストッパ
933,934,1021,1120(a)−(c),1302,1303,1311,1312,2221 分枝機構
950 搬送ライン910,920,930,940に囲まれた領域
1110(a)−(c) セルユニット
1510(a)−(e) 検体装着部
1520(a)−(e) 温度調節素子
1530(a)−(e) 攪拌素子
1540 ホルダ内制御部
1610(a)−(e),1810 容器
1620,1820 磁性ビーズ
1630(a)−(e),1830 検体
1700 可撓部
1710 筒
1720 中空部
1721 開口部
1800 蓋(全体を指す)
1900 磁石棒
1910 磁石
2240 接続ライン
2250 ターンテーブル
2260 光学測定装置
【技術分野】
【0001】
本発明は、生体試料に対し、自動で処理あるいは分析の少なくともいずれかを行う、自動検体処理装置に関する。特に検体複数に対し、個々の処理時間が比較的長い工程を含む検体処理を逐次的に処理,分析する装置において、搬送経路の複雑化,搬送シーケンスの複雑化を回避する技術に関する。
【0002】
ここで、自動検体処理装置とは、自動分析装置,核酸抽出装置、等のように、生体試料等に対して、試薬の分注,攪拌,温度調整、等の処理を、自動で行う装置のことである。
また、処理あるいは検体処理という用語は、検体に対して分注,攪拌,加熱等処理を行うといった一般的な意味に加え、光度計等による測定,分析を行うことも、含意するものとする。すなわち、処理あるいは検体処理という用語は、処理/測定機能と同義である。
【0003】
ここで、検体とは、血液,細胞片,血清等の生体試料に加え、反応液等も含むものとする。
【背景技術】
【0004】
自動検体処理装置とは、血液検査,核酸抽出,核酸増幅、等のように、生体試料に対して、試薬の分注,攪拌,温度調節,搬送、等の検体処理を、自動で行う装置のことである。ここで、検体とは、血液,細胞片,血清、等の生体試料に加え、反応液等も含むものとする。
【0005】
従来の自動検体処理装置は、大まかに逐次処理型と、バッチ処理型の2種類に分類できる。
【0006】
逐次処理型の自動検体処理装置とは、検体が投入されるにつれ随時処理を開始し、逐次的,連続的に処理を進めていく方式である。現行の血液検査装置は、概ねこの方式をとっている。逐次処理型では、同一種類の処理が連続的に発生する場合には、検体の到着順に順次、連続的に処理ができ、処理の待ち時間を最小化できる。
【0007】
一方で、逐次処理方式では、処理シーケンスの変更に対するフレキシビリティーが低い。この点に関しては、複数のモジュールを搬送ライン(例えば特許文献1,2)を介して接続したモジュール方式分析装置(例えば特許文献3)が市販化されている。ここで、モジュールとは、自動検体処理装置の構成要素の一つで、機能ブロックとしての役割を担う、固定設置型の装置で、処理機構か、分析機構か、少なくともいずれかのユニットを具備した自律型の固定設置型の装置を意味する。また、処理機構とは、攪拌,温度調節等の検体処理を行うための機構を意味し、分析機構とは、分光光度計等のように、検体に対し分析を行う機構を意味する。尚、処理機構は、分析機構も含意するものとする。モジュール方式を用いると、検査項目に応じた分析システムの設計変更は、用意するモジュールの数や種類の増減と、モジュール間の接続方法の変更のみで対応できる。
【0008】
しかしながら、モジュール方式であっても、搬送ラインの構成を組み替える必要性や、モジュール数の変更の必要性が生じる点においては、フレキシビリティーが高いとはいいがたい。また、モジュール方式であっても、一つの検体に対して処理を行う回数が増えれば、装置の肥大化が当然発生する。単純に考えれば分注回数が5回ならば分注モジュール(容器に試薬を分注する等の分注動作を行う分注器を備えた処理モジュール)を、5個用意する必要がある。
【0009】
さらに検体の種類や処理目的等により、分注される試薬の量や種類や分注回数,加熱処理の条件やタイミング,攪拌処理の条件,方法やタイミング等が大きく異なる処理項目複数を処理する需要に対して応えるためには、逐次処理方式の自動検体処理装置では、検体処理手順が異なる毎に専用の装置構成を準備する必要があるため、不利である。
【0010】
逐次処理型の自動検体処理装置において装置の肥大化を防ぐ手段としては、従来から処理部の一部にターンテーブルを用いる手法がある(例えば特許文献4参照)。このような方法は、検体を、複数の容器を円周上に並べたことを特徴とする反応ディスクと、反応ディスクを載せ、回転させるためのターンテーブルと、反応ディスクにアクセス可能な複数の処理/測定機能を具備していて、処理/測定機能は、自分の前に来た検体に対して、分注や光学測定を行う。このようにすると、処理/測定機能を使いまわすことができる。例えば、様々な試薬を使い分けて分注できる分注器が一つあれば、一つの容器に何回でも分注できる。どの検体の処理間隔も一定の場合において、特に短時間の間に、周期的に検体処理をする場合に、少ない処理モジュール数で、時間効率もよく処理ができる。
【0011】
しかしながら、前記ターンテーブルを用いて、多数の検体を逐次処理する方法は、処理/測定機能での処理及び測定間隔が一定でない場合には効果が限定的である。例えば、1回の分注動作自体は、プロトコールによらず概ね一定であるとしても、分注間隔(すなわちある試薬を分注してから次の分注を行うまでの間隔)が、検体によってまちまちであれば、効果が限定的である。また、処理間隔が一定となる検体処理であっても、処理間隔が長い場合には、処理/測定機能の稼動効率が悪くなる。つまり、処理/測定機能が稼動せずに次の処理測定を待つことになる。このような場合にも、ターンテーブルに乗せる検体数を増やせば稼動効率の低下は避けられるが、ターンテーブル自体が大きくなり、空間効率が悪くなる。
【0012】
バッチ処理型の自動検体処理装置(例えば特許文献5)は、分注,攪拌,温度調節等の検体処理の工程全てを一つの自動検体処理装置内で行えるよう設計された自動検体処理装置に、同一工程の処理を行う検体を数検体から数十検体といったある程度まとまった単位(バッチ)ごとに一括して投入し、まとめて処理する検体処理方式である。
【0013】
バッチ処理方式では試薬の分注回数や、温度調節条件,攪拌条件等が変わったとしても装置全体を組み替える必要が少ないといったメリットがある。また、比較的省スペースで実現できる傾向がある。
【0014】
一方、一つのバッチについての処理が全て終わるまでの間は、新たな検体の処理を開始することができないことや、一つのバッチを処理している最中に、別の処理工程を必要とする検体を処理する必要が生じた場合には、片方の検体の処理が終了するまで、新たに投入された検体は待機している必要が有るなどの問題がある。また、処理が逐次的でないため、処理が終了した時点において、作業が集中するなど、後工程の作業分散という観点からの効率も悪い。
【0015】
また、バッチ処理方式,逐次処理方式問わず、加熱装置や攪拌装置に容器を移載する場合には、通常は、移載器を必要とする。移載器とは、容器をチャック機構等で掴み、前記チャック機構等で容器を把持した状態で、チャック機構等を3次元的に移動させることで、容器を搬送ホルダ等から取り出す装置のことである。この方式では、移載器で、加熱装置や攪拌装置に装着し、さらに処理が終わった後に、移載器で容器を加熱装置や攪拌装置から取り出し、処理が終わったら再び搬送ホルダに戻すといった方法(例えば特許文献6)が、既にいくつかの装置で実施されている。しかし、このような方法は、先に述べたように、多くの工程間を移載器で移動させるといった手間が掛り、この手間は、制御アルゴリズムを複雑化するだけではなく、処理時間が、移載器の処理速度に律束されることになる。そのため、スループットの観点から不利であり、また、移載器を用いた移載は、容器を宙釣りにするため、特に容器が高温である場合や、結露が生じている場合には、事故のリスクが考えられる。
【0016】
以上が、本発明全体の技術的背景である。
【0017】
その他に本発明の個々の要素の背景技術としては、生命科学に関する技術(例えば特許文献7−9,非特許文献1−3)や、通信・制御に関する技術(例えば特許文献10,11,非特許文献4)等がある。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開1995−128342号公報
【特許文献2】特許3905094号公報
【特許文献3】特許第2988362号公報
【特許文献4】特許第1330782号公報
【特許文献5】特許第4264134号公報
【特許文献6】特表2009−500619号公報
【特許文献7】EP0389063
【特許文献8】US6468810
【特許文献9】特開2007−226771号公報
【特許文献10】US3551889
【特許文献11】US6853312
【非特許文献】
【0019】
【非特許文献1】R. BOOM, et.al, JOURNAL OF CLINICAL MICROBIOLOGY 28, 495 (1990).
【非特許文献2】James D. Watson 他著,中村桂子 監訳,滋賀陽子 他訳;“ワトソン組換えDNAの分子生物学 第3版 遺伝子とゲノム”丸善(2009/1/23)
【非特許文献3】Jana L. Gevertz,et.al, BIOTECHNOLOGY AND BIOENGINEERING,92,347(2005)
【非特許文献4】S. Hoshino, et.al, IEEE Transactions on Automation Science and Engineering 4, 360 (2007)
【発明の概要】
【発明が解決しようとする課題】
【0020】
本発明の目的は、自動検体処理装置分野において、装置を肥大化させずに、逐次処理を実施でき、かつ搬送経路の複雑化や装置の肥大化を回避する技術を提供し、この技術に基づいた、空間効率,時間効率が良く、搬送経路,搬送制御が単純となる検体処理システムを提供することにある。
【0021】
本発明の他の目的は更に、新たな方式の処理シーケンスを要する検体を追加する場合であっても、装置構成を変更することなく、簡便に当該装置で処理可能な処理シーケンスの拡充をすることができる検体処理システムを提供することにある。
【0022】
本発明の、他の目的は、試薬の分注回数や、温度調節条件,攪拌条件,攪拌回数等が一通りではない場合でも、一つの装置で逐次的に処理できる検体処理システムを提供することにある。
【課題を解決するための手段】
【0023】
本発明の自動検体処理装置は、以下の構成を備えることを特徴とする。すなわち、容器に入れられた検体を搬送可能な状態に固定するための搬送ホルダ多数と、前記搬送ホルダを装置内に投入する本体投入部と、投入された搬送ホルダを所定の時間留置させる本体留置部と、搬送ホルダ検体を搬送する搬送ラインを有し、当該搬送ライン上の搬送ホルダに収容された検体に対して処理を施す本体処理部と、を備えた自動検体処理装置であって、前記本体留置部は搬送ホルダを留置させる少なくとも一本の搬送ライン(留置ライン)を有し、前記本体留置部と前記本体処理部との間を前記搬送ホルダが行き来するための搬送ラインを備え、前記留置ラインはループを形成するように構成されていることを特徴としている。尚、搬送ホルダは、本体から取り外し可能である。
【0024】
また、本発明の自動検体処理装置は、必要に応じ、検体処理機能を持つ搬送ホルダ多数を装着可能で、前記ホルダを多数装着した状態であっても、個々の搬送ホルダごとに独立に動作や処理の制御が可能であることが好ましい。
【0025】
また、本発明の自動検体処理装置は、本体処理部で、少なくとも一つの搬送ラインと、分注器等のオンラインで検体に処理を施すことができる処理機構検体(オンライン処理ユニット)を具備した本体処理部を具備している。好ましくは、処理機構検体にて実施される検体処理は、前記搬送ホルダ上で行われる検体処理に対し、短時間で実施可能であることが望まれる。好ましくは、搬送ホルダを、搬送ライン上の特定の部分において停止させる機能(ストッパ)を具備し、検体処理機構は搬送ラインの特定部分において停止した搬送ホルダに直接アクセスし、処理を行えることが望ましい。尚、ここでは、検体処理とは、検体の分析をも含意するものとする。
【0026】
また、本発明の臨床検体処理システムは、少なくとも、留置した検体が、本体処理部で処理を行うタイミングになった場合には、本体処理部で処理を行う順に検体を取り出すことができる。
【0027】
また、本発明の臨床検体処理システムは、本体処理部で処理を終えた検体を、再度本体留置部内に取り込むことができる。
【0028】
また、本発明の自動検体処理装置は、システム全体を制御する本体制御部を備えている。検体処理機能を持つ搬送ホルダを使用する場合には、本体制御部は、有線/無線の通信手段を介して搬送ホルダ一つ一つと通信して搬送ホルダに備わる検体処理機能に対し処理を実行するよう命令を送信し、本体留置部に対して搬送ホルダを出し入れするタイミングを制御し、本体処理部で処理を行うタイミングを制御することができることが望ましい。
【発明の効果】
【0029】
上記構成により、検体処理を行う際の搬送シーケンスは、本体処理部と、本体留置部との間での検体搬送ホルダのやりとりのみを考えればよいため、搬送シーケンスを簡単にすることができる。また、処理シーケンスが異なる検体を同時並行で処理する場合や、新たな処理シーケンスを追加する場合にも柔軟に対応できる。
【0030】
また、本体留置部から検体を出し入れする操作は、搬送ホルダを搬送ラインに沿って搬送するのみであるため、検体を出し入れする際に搬送ホルダから容器を取り外す必要はなく、搬送ラインから搬送ホルダを持ち上げる必要もない。このため、検体容器を掴み挙げる移載器等の構成は不要となり、さらに掴み上げて搬送することによる検体がこぼれる等の不慮の事象を起こすことが無い。
【0031】
また、搬送ホルダに独立制御可能な検体処理機能を備えている場合には、搬送ホルダで処理可能な項目については、処理条件や処理時間が異なる検体を、投入された順に同時並行で処理できる。本体処理部上での処理が必要となった検体は、順次本体処理部に投入し、処理することができるため、検体複数が逐次的に投入され、それぞれの検体の加熱,攪拌等の処理条件や処理時間(例えば分注間隔等)がまちまちな検体の場合でも、逐次処理が可能である。
【0032】
また、現実の検体処理では、(1)処理時間が長い処理項目(温度調節、場合によっては攪拌処理),(2)頻繁に行う処理項目(例えば攪拌処理),(3)処理時間が処理シーケンスによらずほとんど一定で短く、頻度も中程度以下の処理項目(例えば分注や磁性ビーズの捕獲等)に分かれる。(1)および(2)は小規模な装置構成で実現可能な場合が多く、(3)は比較的規模の大きな装置構成となる傾向がある。従って、処理項目(1)および(2)を搬送ライン上の搬送ホルダ上で行い、処理項目(3)に相当する分注や、磁性ビーズの捕獲等の処理項目を本体処理部で行うことにより、どの処理工程においても装置の待機時間が少なくなり、マシンタイム上の効率を向上することができる。更に、本体処理部に設置された処理機能は、1つの検体の処理を行う上で必要な使用回数によらず1台ですむ。処理部に設置された処理機能が分注器で、1つの検体の処理を行う上で必要な使用回数が5回であったとしても、5回、検体を、搬送ホルダごと本体留置部と本体処理部とのあいだで往復させればよいため、1台の分注器を用意すればよい。
【図面の簡単な説明】
【0033】
【図1】本発明の形態における搬送ホルダの外観図。
【図2】本発明の形態における搬送ホルダの正面図。
【図3】本発明の形態における搬送ホルダの平面図。
【図4】本発明の形態における搬送ホルダのA−A線断面図。
【図5】本発明の形態における搬送ラインの断面図。
【図6】本発明の形態における搬送ホルダを装着時の搬送ラインの断面図。
【図7】本発明の形態における自動検体処理装置の外観図。
【図8】本発明の形態における本体処理部の構成。
【図9】本発明の形態における本体留置部の構成。
【図10】本発明の別形態における本体留置部を構成するセルユニットの構成。
【図11】本発明の形態における本体留置部の構成。
【図12】本発明の形態における本体投入部の構成。
【図13】本発明の形態における本体収納部の構成。
【図14】本発明形態における検体処理のフローの一例を示すフローチャート。
【図15】本発明の別形態における搬送ホルダの構成。
【図16】本発明の別形態における搬送ホルダの構成。
【図17】本発明の形態における栓。
【図18】本発明の形態における栓を容器に装着した状態。
【図19】本発明の形態における栓を容器に装着した状態。
【図20】本発明の形態における栓を容器に装着した状態。
【図21】本発明の形態における栓を容器から取り外す様子。
【図22】本発明の形態における本体処理部の構成。
【発明を実施するための形態】
【0034】
<搬送ホルダの構造と構成>
図1〜図4に本発明における搬送ホルダの一例を示す。
【0035】
搬送ホルダは、少なくとも容器を垂直に保持する容器保持部100と、検体の温度調節を行うための温度調節素子310(a)−(f)と攪拌素子430とを具備し、搬送ホルダ底部440には、非接触型のIC(Integrated Circuit)カードと同様の、近接通信を行う手段450を具備し、温度調節素子310(a)−(f)と攪拌素子430を制御するホルダ内制御部110を具備していることを主な特徴としている。
【0036】
搬送ホルダの容器保持部100は、アルミニウム等のように熱伝導効率の良い物質で作られていることが望ましい。また、搬送ホルダの容器保持部100は、容器を挿入するための容器保持部120と、容器保持部の中心軸400に垂直な平面による断面形状が六角形となるように加工されていて、容器保持部の外壁300(a)−(f)には、温度調節素子310(a)−(f)としてペルチェ素子が貼り付けられている。また、ペルチェ素子の外側には、放熱部材として、ヒートシンク320(a)−(f)が貼り付けられている。本例では、温度調節素子としてペルチェ素子を用いたが、加熱のみしか行わない場合には、電熱線やセラミックヒータ等のジュール熱を用いた加熱素子で置き換えてよい。容器の温度を測定するための温度センサが具備されていても良い。
【0037】
搬送ホルダには、容器外側から振動を与え、容器内の検体を攪拌するための攪拌素子430として小型のバイブレータを具備している。バイブレータ以外の攪拌素子としては、超音波振動子やシェイカーを具備する形態も考えられる。
【0038】
搬送ホルダ外壁部130は絶縁性の部材で形成され、外部から電力を受け取るための上側のホルダ電極140と下側のホルダ電極150とが、上下平行に2本設置されている。
【0039】
また、ホルダ内制御部110は、自動検体処理装置本体には、自動検体処理装置全体を制御する制御装置,本体制御部720(後述図7にて図示)との通信制御や、自動検体処理装置本体から発行された命令を解釈,記憶する手段として、制御回路410も具備している。また、内蔵電池を備えた電源部420があっても良く、状況に応じて、温度調節機構,攪拌機構,ホルダ内制御部等に供給される電力を、内蔵電池あるいは、外部電力のいずれかに切り替えて使用しても良い。また、外部電源を用いて内蔵電池を充電する手段を備得していても良い。
【0040】
尚、以降は、特に断りのない限り、検体は、搬送ホルダに装着された容器に入れられているものとする。
【0041】
<搬送ラインの構造と構成及び動作の一例>
図5に本実施例の形態における搬送ラインの垂直断面図を示す。図6に搬送ホルダを装着時の、搬送ラインの垂直断面図を示す。
【0042】
ガイド電極540,550は、線状の金属製の電極を板状の絶縁材530に対して並行に二列固定することで作成されている。このように一体として作成したガイド電極(540,550)を、搬送ラインの左右両側に設置された壁520(a),(b)に貼り付ける。具体的に左側の壁520(a)には、ガイド電極540(a)とガイド電極550(a)と、ガイド電極540(a)とガイド電極550(b)の間を絶縁する絶縁材530(a)を具備している。右側の壁520(b)には、ガイド電極540(b)とガイド電極550(b)と、ガイド電極540(b)とガイド電極550(b)の間を絶縁する絶縁材530(a)を具備している。
【0043】
床500の上面には、搬送ホルダを搬送するための搬送ベルト510が張られている。
即ち、ベルトライン方式を採用する。ベルトライン方式は、大量の搬送ホルダを少数のアクチュエータで搬送できる点や、加減速を頻繁に行う必要がない点において移載器等よりも制御が容易で、搬送ホルダを宙釣りにする等のリスクの高い工程が不要な点において、移載器等よりも信頼性も高い。
【0044】
ガイド電極は、搬送ホルダのホルダ電極140,150と接触するように上下に設置されている。上側の二組のガイド電極540(a)とガイド電極540(b)には同電位が印加され、下側の二組のガイド電極550(a)とガイド電極550(b)には同電位が印加される。また、上側のガイド電極540(a)およびガイド電極540(b)は上側のホルダ電極140と、電気的に接触する。また、下側のホルダ電極150は、ガイド電極550(a)およびガイド電極550(a)と、電気的に接触する。
【0045】
また、電極が両壁面にあるため、万一ベルトライン上で検体が零れても、上側のホルダ電極140とガイド電極540、下側のホルダ電極150とガイド電極550の間で導通が生じるリスクは極めて少ない。また、ガイド電極を側壁に設けることで、ベルトラインによる搬送と、レールによる電力供給が両立することができる。
【0046】
ベルトラインの一部には、その一部の床部下面に、搬送ホルダ底面に備わる近接通信手段450に対して情報のやり取りをするための近接通信手段560を備える。尚、床部が金属などのように電磁波の透過性が悪い素材でできている場合には、近接通信手段を取り付けた部分付近の床500には、穴(図中には記載しない)をあける必要が生じる。
【0047】
以下、搬送ラインはベルトラインである場合を中心として説明するが、搬送ラインの別の形態としては、自走路を用いる形態も考えられる。
【0048】
<本体の構成について>
図7に、本実施例の形態における、自動検体処理装置全体の構成を示す。
【0049】
また、本発明の自動検体処理装置は、少なくとも、検体に何らかの処理(分注,光学測定など)を加えるための本体処理部700,搬送ホルダに装着した検体を所定の時間留置させる本体留置部710,オペレータによって、あるいは搬送ラインを介して搬送ホルダに装着した検体を投入する本体投入部730,処理の完了した搬送ホルダを収容する本体収納部740、さらにはこれらの構成要素の動作、及び搬送ホルダによる搬送中処理動作を制御する本体制御部720から構成されている。尚、搬送ホルダで行える検体処理については、搬送ライン上(主に本体留置部)で行われるものとする。
【0050】
<本体処理部について>
図8に、本実施例の形態における、本体処理部700の具体的な構造,構成の一例を挙げる。本実施例の形態において、本体処理部700は、主に3本の搬送ライン800,810,820と搬送ライン810に隣接したオンライン処理ユニット815と、搬送ライン810を搬送される搬送ホルダとを、オンライン処理ユニット815の前で停止させるストッパ816から構成されている。
【0051】
ここで、オンライン処理ユニットとは、検体に対し、処理,分析を行う固定型の検体処理機構で、特に、搬送ライン上に停止した搬送ホルダあるいは搬送ライン上を搬送されている搬送ホルダに装着された検体に対し直接アクセスし、処理,分析できる処理/分析機構のことを意味する。
【0052】
オンライン処理ユニットの具体例としては、搬送された容器に試薬を分注する分注機構や、搬送された容器に収容された液体の吸光度や散乱光強度などを測定する光学測定装置等、様々なものが想定される。
【0053】
次に、搬送ラインの搬送方向について簡単に説明する。図8の搬送ライン800の位置を模式的に示す長方形内には、搬送ライン800の搬送方向801が、補助記号として記載されている。この矢印は、搬送ライン800の搬送方向を説明するために記載されたものである。即ち、搬送ライン800は矢印の方向に従って容器を搬送する。以降、搬送ラインの搬送方向の説明は同様に行い、以降搬送方向を示す矢印には符号を付さない。また、搬送ラインには、搬送方向が一方通行の場合(矢印が一つしかかかれていない場合)には、上流側、すなわち、矢印の矢尻側と、下流側、すなわち矢印の矢先側にそれぞれ1つずつ末端が存在することになる。以降、このような場合には、矢尻側の末端のことを上流側末端、矢先側の末端のことを、下流側末端という。例えば、802は、搬送ライン800の上流側末端であり、823は搬送ライン820の下流側末端である。上流側末端,下流側末端についても、以降は符号を付さない。
【0054】
次に、図8の本体処理部の搬送ライン配置について説明する。搬送ライン800と820は互いに平行で、搬送ライン800の搬送方向と搬送ライン820の搬送方向は逆方向である。搬送ライン810は、上流側側面にて搬送ライン800と交差し、下流側側面にて搬送ライン820交差する。
【0055】
尚、搬送ラインの交差部に対向する角、例えば818等は、フィレット形状(1/4円弧形状)であることが望ましい。図中では、直角状の角が描かれているが、適宜フィレット形状とするのがよい。
【0056】
次に、図8の本体処理部での搬送ホルダの流れ及び、検体処理の流れを説明する。
【0057】
直線搬送ライン800の上流側末端802から導入された搬送ホルダは、搬送方向に沿って搬送ライン810に導入される。
【0058】
次に、搬送ライン810上でストッパ816により一時停止され、この状態でオンライン処理ユニットでの処理が施される。同時に、搬送ライン810の、ストッパ付近の床裏面に設置された近接通信手段817を通じて、本体制御部720と通信しオンライン処理ユニットによる処理が終わった後、ストッパ816により一時停止が解除され、再び搬送ライン810上を搬送される。
【0059】
最後に、搬送ホルダは、搬送ライン820に導入され、搬送ライン820の末端部823から本体処理部700の外部へ搬送される。
【0060】
搬送ラインが全てベルトラインである場合、搬送ホルダを停止させる場合に、搬送ラインの搬送ベルトそのものを止めても良いが、本発明の形態においては、以降、ストッパは、メカニカルストッパとする。メカニカルストッパとは、少なくとも1つのアームを具備し、少なくともアームを搬送ライン上に突き出した状態(ON)と、アームを搬送ライン上に突き出さない状態(OFF)の2つの状態を実現できるストッパである。ONの状態においては、搬送ホルダとアームが機械的に接触することで、搬送ベルトが駆動中にも搬送ホルダを停止させることができ、OFFの状態では、アームは搬送ホルダの搬送を妨害しない。
【0061】
<本体留置部について>
図9に、本体留置部の構成の一例を示す。前記本体留置部は、4本の搬送ライン910,920,930,940からなるループ状の搬送ライン(ループライン)と、投入ライン911と、収納ライン935と、ストッパ912,913,931,940と、分枝機構933,934から構成されている。
【0062】
図9の、本体留置部では、前記ループラインのループ内に搬送ホルダ複数を留置することができる。
【0063】
投入ラインは、容器に入れられ搬送ホルダに装着された検体で、これから処理を行う検体を、本体留置部に投入するための搬送ラインで、本体投入部730に接続される。収納ラインは本体収納部740に接続される。
【0064】
また、搬送ライン910の上流側末端と、搬送ライン930の下流側末端は、本体処理部700と接続され、搬送ライン910の上流側末端は、本体処理部700から検体を受け取るために用い、搬送ライン930の下流側末端は、本体処理部700に検体を引き渡すために用いる。図8に示す本体処理部を用いる場合には、搬送ライン910の上流側末端は、搬送ライン820の下流側末端823と接続され、搬送ライン930の下流側末端は、搬送ライン800の上流側末端802と接続される。
【0065】
ストッパ931は、前記ループライン上で、搬送ホルダを一時停止させるために設けられたメカニカルストッパである。
【0066】
分枝機構933,934は、以降断りのない場合には機械的な分枝機構とする。機械的な分枝機構にはいくつかの形態が考えられるが、以降断りのない限り、少なくとも1つのアームを具備し、少なくともアームを搬送ライン上に突き出した状態(ON)と、アームを搬送ライン上に突き出さない状態(OFF)の2つの状態を実現できる分枝機構を指す。ONの状態では、アームによって、搬送方向がアームに沿って曲がり、OFFの状態では、搬送ラインの搬送方向のままである。また、分枝機構は必要に応じ、センサを具備し、前記センサは、搬送ライン上を搬送される搬送方向を切り替えたい搬送ホルダが上流側から接近してきたことを検知するためのセンサを具備しているものとする。
【0067】
分枝機構933は、搬送ライン930上を直進する搬送ホルダの進路を切り替え、ONの状態において、搬送ライン940に導入するために設けられ、分枝機構934は、ONの状態において、搬送ライン935に導入するために設けられている。
【0068】
分枝機構933をONにしている限り、ストッパ931のON/OFFにかかわらず、ループライン内の搬送ホルダは、ループ内にとどまることになる。
【0069】
そして、ループ内から取り出したい搬送ホルダが、分枝機構933に接近し、かつ、前記搬送ホルダと、分枝機構933との間に別の搬送ホルダが存在しない状況において、分枝機構933をOFFにすることで、ループ内から、所望の容器のみを取り出すことができる。
【0070】
取り出したい搬送ホルダよりも上流側に別の搬送ホルダがあり、かつ、上流側の搬送ホルダと取り出したい搬送ホルダとの間隔が狭い場合には、上流側の搬送ホルダが全てストッパ931を通過した直後にストッパ931をONに切り替え、一旦取り出したい搬送ホルダを停止させた後、取り出したい搬送ホルダより上流側にある搬送ホルダ全てが分枝機構933を通過したのを確認してストッパ931をONにすれば、後続する搬送ホルダがループライン上から排出されることはない。これらの処理を実施するために、ストッパ931および分枝機構933の前後での搬送ホルダを検知するためのセンサ等を設けておくことが望ましい。
【0071】
前記の取り出したい搬送ホルダよりも下流側に別の搬送ホルダが後続し、かつ、下流側の搬送ホルダと取り出したい搬送ホルダとの間隔が狭い場合には、取り出したい搬送ホルダが、ストッパ931を通過次第、ストッパ931をOFFにし、後続する搬送ホルダ全てを一旦せきとめれば、後続する搬送ホルダがループライン上から排出されることはない。
【0072】
このようにして、ループライン内での搬送ホルダの順番にかかわらず、所望の特定の容器のみを、選択的にループライン外に取り出すことができる。
【0073】
ストッパ912は、本体処理部から戻ってきた搬送ホルダを必要に応じせきとめるためのストッパで、ストッパ913は、投入ラインから投入される容器を必要に応じせきとめるためのストッパで、ストッパ941は、搬送ライン上を搬送される搬送ホルダをせきとめるためのストッパである。これらのストッパを配置することで、搬送路の交差部において、ほぼ同時期に別のルートからそれぞれ搬送ホルダがある搬送ラインに導入されるような状況を回避できる。例えば、搬送ライン910に本体処理部から戻ってきた搬送ホルダと、搬送ライン911から投入された検体ホルダが、同時期にそれぞれのストッパ付近に差し掛かったとしても、より優先順位の高いほうのストッパをOFFにして、優先順位の低いほうのストッパをONにすれば、優先順位の高いほうの搬送ホルダを先に搬送ライン910に導入できる。
【0074】
尚、図9のような本体留置部の構成である場合には、ループライン内に留置させる検体の個数を多くするためには、ループに囲まれた領域(搬送ライン910,920,930,940に囲まれた領域950)の面積が増大し、結果として、空間効率が悪くなる。
このような場合には、本体留置部と本体処理部を一体化し、例えばループ上にもう一つ別のストッパ(図示しない)を設置して、ループ上の特定の場所において搬送ホルダを停止させる機能と、前記ストッパによって停止された状態にある搬送ホルダにアクセス可能なオンライン処理ユニット(図示しない)を、ループに囲まれた領域内に設置する方法や、ループ内に別のループを構成する方法が考えられる。
【0075】
ループ内に別のループを構成することで本体留置部の空間効率を上げる方法には、様々な構成が考えられるが、その一例を、図10,図11を用いて説明する。図10は、本体留置部の別の形態において、検体を留置するためのセルユニットである。セルユニットには、多数の搬送ホルダを留置することができ、セルユニットのループライン上に物理的に詰め込める個数とほぼ同等の個数の搬送ホルダをループライン上に数珠繋ぎに留置できる。実際には、セルユニットから搬送ホルダを搬出する際、あるいはセルユニットに搬送ホルダを投入する場合にスムーズな出し入れができるよう、満杯よりも数個少ない数を上限とすることが望ましい。
【0076】
このように搬送ライン,ストッパ,分枝機構を制御することによって、セルユニットに対して、所望のタイミングに目的の搬送ホルダを出し入れできる。また、検体を取り出す予定がしばらくないセルユニットに対しては、セルユニットを構成する搬送ラインの駆動を停止させるよう制御してもよい。
【0077】
セルユニットは、図10の例においては4本の搬送ライン1010,1020,1030,1040からなるループ状搬送ラインおよび、ループ状搬送ラインへ搬送ホルダを取り込むための搬送ライン(導入ライン)1000,分枝機構1021,ストッパ1001,1011,1022から構成されている。
【0078】
図10のセルユニットは、導入ラインを経由して搬送ライン1010に導入された搬送ホルダを、搬送ライン1010,1020,1030,1040から構成される前記ループライン内に留置する。搬送ライン1020の下流側末端は、ループラインから搬送ホルダを取り出すための、搬出口となっている。また、搬送ライン1020と1030の交差部には、分枝機構1021が設けられ、分枝機構1021をONにしている限り、前記本体留置部から、搬送ホルダが外に出ることはない。分枝機構をOFFにすると、搬送ライン1020上を搬送される搬送ホルダは、前記ループ外に排出される。連続して搬送される搬送ホルダのうち、特定の一つをループ外に取り出す手順は、図9の場合とほぼ同様で、図9のストッパ931と同様の役割をするストッパ1023が具備されている。搬送ライン1020の上流側末端は、後述のように別の搬送ラインと接続されることになるが、別の搬送ラインとの交差部において、ほぼ同時期に別のルートからそれぞれ、2つ以上の搬送ホルダがある搬送ラインに導入されるような状況を回避するために設置されている。
また、ストッパ1011や1001も同様の役割で設置されている。
【0079】
このようにして、ループライン内での搬送ホルダの順番にかかわらず、所望の特定の容器のみを、選択的にセルユニット外に取り出すことができる。
【0080】
図11に示す、本体留置部の別の形態は、図9の本体留置部から、搬送ライン940等を除外した搬送ライン系の内側に、図10のセルユニット1110(a)−(c)3つを備えた構成になっている。即ち、本例においては、3つのセルユニット1110(a)−(c)を囲むように配置された3本の直線搬送ライン910,920,930と、新たに投入された検体を投入部から搬送ライン910に取り込むための投入ライン911と、処理が完了した検体を本体収納部に送るための搬送ライン(搬出ライン)935と、搬送ライン910を流れる検体をいずれかのセルユニット1110(a)−(c)が備える投入ラインに搬送するための分枝機構1120(a)−(c)と、搬送ライン930を搬送される検体を本体収納部へと続く搬出ライン935に導入するための分枝機構934等から構成されている。
【0081】
また、本体留置部の搬送ライン910の上流側末端は、本体処理部700の出口、即ち搬送ライン820の下流側末端部823と接続され、搬送ライン930の下流側末端部は、本体処理部700の入り口、即ち搬送ライン800の上流側末端部802と接続されている。
【0082】
本体処理部から搬出された搬送ホルダや、本体投入部から投入された搬送ホルダは、処理シーケンスに従って本体留置部を経由し、いずれかのセルユニット、または本体処理部700に搬送される。いずれかのセルユニットに留置された検体は、前述の制御方法によって必要なタイミングにおいて、選択的に取り出すことが可能である。
【0083】
セルユニットから搬出された容器は、搬送ライン1130を経由して、本体処理部に導入されるか、あるいは、本体収納部に搬送される。本体処理部,本体収納部のいずれかに搬送するかは、その容器に収容された検体に規定されたシーケンスに従い、制御部が判断して、搬送ラインや分枝機構の動作を制御する。
【0084】
このように複数のセルユニットを備えることによって、複数の検体を留置することと、検体が投入された順序によらず、必要なタイミングにおいて、選択的に取り出すことと、所望のタイミングにおいて取り出すことと、高い空間効率を両立できる。
【0085】
<セルユニットの制御方法>
図10のセルユニットを有する本体留置部に対して、搬送ホルダを搬送する手順、および本体留置部から搬送ホルダを搬出する手順を説明する。これらの手順は、本体制御部の搬送制御機能からの命令で行われるが、処理のアルゴリズム等については、実施例1にて後述する。
【0086】
まず、セルユニット搬送ホルダを投入する場合について、セルユニット1110(b)に搬送ホルダを投入する場合を一例として例示する。手順は以下の通りである。
【0087】
(1)本体投入部あるいは、本体処理部から搬送ホルダが本体留置部の搬送ライン910に投入される。
【0088】
(2)搬送ホルダが、セルユニット1110(b)に搬入するための分枝機構1120(b)に接近したら、ストッパ1121(b)を駆動させ、当該搬送ホルダおよび、当該搬送ホルダよりも上流にある他の搬送ホルダを搬送ライン910上に一時停止させる。
【0089】
(3)ストッパ1121(b)と搬送ホルダとの間に、他の搬送ホルダが存在しない状態になった後、分枝機構1120(b)をONにして、セルユニット1110(b)への投入ラインに当該搬送ホルダのみを導入する。
【0090】
(4)1100(b)の導入ライン1000に設置されたストッパ1011を作動させ、搬送ホルダを導入ライン上に停止させる。
【0091】
(5)セルユニット1100(b)の搬送ライン1010上を搬送される他の搬送ホルダで、ストッパ1011よりも下流側に存在する搬送ホルダが,搬送ライン1000と搬送ライン1010の交差点を充分(搬送ホルダ1〜2個分)に通過したことを確認して、ストッパ1001をOFFにし、セルユニット1110(b)に検体を導入する。
【0092】
(6)ストッパ1011をOFFにし、(5)でせき止めた他の搬送ホルダについて搬送ライン1010上での搬送を再開する。
【0093】
上記(1)〜(6)の手順と同様の方法で他のセルユニットに対しても検体を導入でき、連続して搬送ホルダが搬送ライン910上を搬送されてきたとしても、所望の搬送ホルダのみを選択的にセルユニット内に導入することができる。
【0094】
次に、セルユニットから、特定の搬送ホルダを取り出す方法について、説明する。手順は以下の通りである。なお、分枝機構1021は、どのセルユニットにおいても通常はONであり、あらかじめONに設定されているものとする。また、各ストッパ,分枝機構には、これまで同様付近に検体が接近/通過した場合、どの検体が接近/通過したかを判定する手段が具備されているものとする。
【0095】
(1)セルユニットの搬送ライン1010,1020,1030,1040駆動させ、取り出す目的の搬送ホルダを、ストッパ1023の直前の位置に到達させる。
【0096】
(2)取り出したい検体よりも下流側の検体がストッパ1023の通過を確認次第ストッパ1023をONにして、目的の搬送ホルダを搬送ライン1020上に停止させる。
【0097】
(3)目的の搬送ホルダよりも下流側に位置する他の搬送ホルダ全てを、分枝機構1021に対して充分に通過させるよう、搬送ラインを引き続き駆動させる。
【0098】
(4)目的の搬送ホルダよりも下流側に位置する搬送ホルダが交差点を充分に通過した後に分枝機構1021をOFFにする。
【0099】
(5)ストッパ1023をOFFにして目的の搬送ホルダの搬送を再開する。
【0100】
(6)目的の搬送ホルダがストッパ1023を通過した後に、再びストッパ1023をONにして目的の搬送ホルダ以外をせき止める。
【0101】
(7)目的の搬送ホルダがOFFになった分枝機構1021を充分通過してストッパ1022付近に差し掛かった後、分枝機構1021をONにして、他の搬送ホルダがセルユニットの搬送ライン上をループできるようにする。
【0102】
(8)必要に応じ、ストッパ1023をOFFにして目的の搬送ホルダよりも下流側の搬送ホルダの搬送を再開する。
【0103】
このようにすると、各セルユニットから、セルユニット内の順番によらず、所望の検体のみを搬送ホルダごと、搬送ラインから離さずに取り出すことができる。一方、取り出しにかかる時間は、最悪の場合はセルユニットを一周するのと同程度の時間を要する。しかしながら、搬送ホルダ数十個を留置できるような構成を考えた場合、ループライン一周の長さは高々数百cm以内となり、搬送速度を、〜0.2m/s程度と、従来の検体搬送システムと同程度とした場合、高々数秒であり、通常の反応のタイムスケールに比べると、この程度の時間は、殆ど0と考えてよい。つまり、所望のタイミングでセルユニットから検体を取り出せると考えてよい。
【0104】
<本体投入部について>
本発明の本体投入部730を、搬送ラインとストッパの組み合わせで作成することも考えられる。図12に本発明の本体投入部を示す。本発明の本体投入部は、複数の並列に並べられた搬送ライン1200(a)−(d)のそれぞれに、オペレータが直接搬送ホルダを投入できる。搬送ライン1200(a),(b)の下流側末端は、いずれも本体留置部の搬送ライン1210の側面に接続され、搬送ライン1200(c),(d)の下流側末端は、いずれも本体留置部の搬送ライン1220の側面に接続されている。搬送ライン1210,1220はいずれも、搬送ライン1230の側面に接続されている。搬送ライン1230は、本体留置部、即ち、図9又は図11の搬送ライン911に接続される。
【0105】
ストッパ1201(a)−(d)を、OFFにすることで、必要なタイミングに搬送ホルダの搬送が開始され、搬送ライン1210又は搬送ライン1220に搬送ホルダが流れ込み、搬送ライン1230を経由して本体留置部に検体が投入される。
【0106】
本例の場合は本体投入部も搬送ラインで構成されているため、本体投入部上でも個々の搬送ホルダが保持している検体に対して処理を実施できる。
【0107】
尚、本例では、搬送ライン1200(a)−(d)のそれぞれに、オペレータが直接搬送ホルダを投入する場合を想定したが、搬送ライン1200(a)−(d)の上流側全てあるいは、いずれかは、何らかの前工程の装置と接続されていてもよい。
【0108】
また、搬送ライン1230には、搬送ホルダと通信するための近接通信手段1231が具備されているものとする。
【0109】
また、搬送ライン1200(a)−(d)の全ては、別途、導入された検体の検体番号を判別するための機構(例えば、検体容器に貼り付けられたバーコードを読むためのバーコードリーダ等)を具備しているものとする(図示しない)。この検体番号は、ホルダのIDやプロトコールと対応づけられる。
【0110】
本発明の本体収納部は搬送ラインで作成されているため、この上でも反応を開始できる。このような構成をとると、本体留置部への引渡し前から、反応を開始させる必要がある場合に有利である。逆に、搬送ホルダの温度調節機構にペルチェ素子を採用した場合には、ペルチェ素子に、加熱時と逆極性電圧を印加することで、検体を冷却すれば、検体の温度を下げることができ、反応を抑制する方向に律束した状態で待機させることができる。
【0111】
<本体収納部について>
また、本発明における本体収納部も、搬送ライン,ストッパ,分枝機構等から構成することができる。
【0112】
図13に本発明の本体収納部を示す。本発明の本体収納部は、複数の搬送ライン1300(a)−(d)並列に並べられた部分を持ち、搬送ライン1300(a),(b)の上流側末端は、搬送ライン1310の側壁と接続され、搬送ライン1300(c),(d)の上流側末端は、搬送ライン1320の側壁と接続される。さらに、搬送ライン1310,搬送ライン1320の上流側末端は、搬送ライン1330の側壁と接続される。搬送ライン1330の上流側末端は、本体留置部、即ち、図9又は図11の搬送ライン935と接続される。
【0113】
本体留置部から、排出された搬送ホルダは、搬送ライン1330に導入される。このとき、搬送ライン1300(a),(b)のいずれかに収納する場合には、分枝機構1311をON、分枝機構1312をOFFにして、搬送ホルダを搬送ライン1310に導入し、その後、搬送ライン1300(a)に導入したい場合には、ストッパ1302をOFFにし、搬送ライン1300(b)に導入したい場合にはストッパ1302をONにすればよい。搬送ライン1300(c),(d)のいずれかに収納する場合には、分枝機構1311をOFF、分枝機構1312をONにして、搬送ホルダを搬送ライン1320に導入し、その後、搬送ライン1300(d)に導入したい場合には、ストッパ1303をOFFにし、搬送ライン1300(c)に導入したい場合にはストッパ1303をONにすればよい。尚、個々のストッパが、これからどの検体が通過するかを判断するための手段として、センサや、カウンタ等が別途装着されているものとする(図示しない)。また、分枝機構付近を同時に複数の搬送ホルダが通過するのを防ぐため、ストッパ1311を用いて搬送タイミングの制御をしているものとする。
【0114】
また、搬送ライン1300(a)−(d)の下流側末端には、それぞれ搬送ラインをせき止め、機械的に搬送ホルダの進行をとめる手段としてストッパ1301(a)−(d)が備えられている。このようにすることで、搬送ラインから搬送ホルダが零れ出ず、また、ストッパと接触するか、自分より前に収納された搬送ホルダと接触するかのいずれの状態まで搬送ホルダは、搬送され、搬送ライン1300(a)−(d)のいずれかに、搬送ホルダが間を、間を空けずに収納されることになる。
【0115】
オペレータが、個々の搬送ラインから搬送ホルダを取り出す場合には、搬送ラインのベルトコンベアを停止することができる手段を別途具備(例えばスイッチ)しているものとする(図示しない)。
【0116】
尚、本例では、搬送ライン1200(a)−(d)のそれぞれに、オペレータが直接搬送ホルダを投入する場合を想定したが、搬送ライン1200(a)−(d)の上流側全てあるいは、いずれかは、何らかの前工程の装置と接続されていてもよい。
【0117】
本発明の本体収納部は搬送ラインで作成されているため、この上でも反応を継続できる。このような構成をとると、後工程への引渡しまでの間反応を継続させる必要がある場合に有利である。逆に、搬送ホルダの温度調節機構にペルチェ素子を採用した場合には、ペルチェ素子に、加熱時と逆極性電圧を印加することで、検体を冷却すれば、検体の温度を下げることができ、反応を抑制する方向に律束した状態で収納できる。
【0118】
<本体制御部について>
次に、本発明の自動検体処理装置の本体制御部について説明する。
【0119】
本体制御部は、有線通信ラインにて各ユニットと情報のやり取りを行う。少なくとも、全ての搬送ライン,搬送ラインに隣接して設けられた分枝機構,全てのストッパの状態を制御する手段が具備されている。
【0120】
前記搬送ラインは、本体処理部700,本体留置部710,本体投入部730,本体収納部740を構成する搬送ライン等に具備された搬送ラインを含む。即ち、本体制御部は、搬送ラインの駆動/停止を切り替え、必要に応じ搬送速度,搬送方向を設定することができ、個々のストッパや分枝機構のON/OFFを切り替えることができるものである(以後、搬送制御機能と称する)。また、ストッパや分枝機構等に設置されたセンサからの搬送ホルダ情報を受信することもできる。
【0121】
本体制御部は、少なくとも本体処理部に設置された、オンライン処理ユニット等の検体処理機能の動作を制御することができる(以降、検体処理ユニット制御機能と称する)。
【0122】
また、本体制御部は、搬送ホルダ通信機能を具備している。この機能の下位の機能には、少なくとも個々の搬送ホルダに具備されたホルダ内制御部に、固有識別符号(固有ID)を割り付けるアドレッシング機能と、搬送ホルダに出すべき命令(例えば特定の時刻t0から室温から50°/minで70℃まで昇温すること等)を複数記憶する手段と、これらの命令を近接通信手段を介して搬送ホルダに送信できる形式に変換する手段を具備されている。即ち、既に投入された搬送ホルダに対し、固有のIDを付与し、個々の搬送ホルダに対して、加熱や攪拌といった命令を送信することができ、必要に応じて個々の搬送ホルダから送信される信号を受信することができる。
【0123】
また、本体制御部は検体処理プロトコール記憶機能を具備している。通常、用手法,自動機による検体処理に問わず、処理手順が既に確立している検体に対しては、検体の種類や処理内容に応じ、検体処理プロトコールといわれる処理手順書が作成されている。検体処理プロトコールには、個々の検体処理項目を実施するための作業内容及び作業の順番,作業の開始/終了条件が記載されている。例えば、加熱時間,添加する試薬の種類,試薬分注量,分注開始条件等が記載されている。検体処理プロトコール記憶機能は、このような検体処理プロトコールを複数、メモリに記憶する機能である。
【0124】
また、本体制御部は、検体ID管理機能を具備している。通常、患者等から採取された検体そのものにも、固有のID(検体番号)例えば、「100704A10032」などといった数字と文字の組み合わせで書かれた固有のシリアル番号が付されている(検体番号は、通常検体容器にバーコードラベル等として貼り付けられている。)。検体ID管理機能は、前記IDと、検体処理プロトコールの種類と、搬送ホルダのIDを対応付ける機能である。
【0125】
また、本体制御部は、これから処理を行う検体、及び既に処理を開始している検体それぞれの処理シーケンスを、個々の搬送ホルダの固有IDと対応した検体処理プロトコールに基づいて定めることができ、個々の搬送ホルダに具備された検体処理機能のタイミング制御及び、本体留置部からの取り出しタイミングを含む、搬送系のタイミング制御,オンライン処理ユニットの動作タイミングを制御することができる。
【0126】
また、本体制御部は、ユーザーに現在の検体処理状況を通知し、必要な場合には割り込み命令をユーザーの意思で入力するためのGraphical User Interface(GUI)が具備されている。オペレータはGUIを通じて、検体ID管理機能の情報から、どの検体にどのような処理がなされるかを確認/決定することができる。
【0127】
さらに、これらの機能の上位命令系統として、本体制御部はスケジューリング機能を具備する。スケジューリング機能は、検体ID管理機能等によって指定された個々の検体の検体処理プロトコールをプロトコール記憶機能から呼び出し、搬送ホルダ位置情報等の状況を加味して、搬送制御機能,検体処理ユニット制御機能,搬送ホルダ通信機能、を介して、個々の構成要素(搬送ホルダや搬送系等)をタイミング制御することで、全検体の処理のワークフローを定める。また、スケジューリング機能は、個々の搬送ホルダを本体留置部から出し入れするために、留置時間記憶機能や留置時間監視機能として、タイマー等を具備している。
【0128】
これらの手段を具備した本体制御部からの指示に従い、本体処理部での検体処理は、個々の検体の処理手順を定めた検体処理プロトコールに従い、本体制御部720からの指示で自動的に実施される。
【0129】
<搬送ホルダの制御方法>
本発明の自動検体処理装置本体には、本体制御部720が具備されている。本体制御部(720)には、個々の搬送ホルダに指令を出すためのホルダ通信機能が具備されている。本体制御部のホルダ通信機能には、下位の機能として、個々の搬送ホルダのホルダ内制御部に、固有識別符号(固有ID)を割り付けるアドレッシング機能と、搬送ホルダに出すべき命令(例えば特定の時刻t0から室温から50°/minで70℃まで昇温すること等)を複数記憶する手段と、これらの命令を近接通信手段を介して搬送ホルダに送信できる形式に変換する手段が具備されている。
【0130】
また、搬送ホルダ内制御部には前記固有IDを記憶し、この固有IDを通信手段にて外部装置から読み出すことを可能とする手段(例えば、RFIDやICタグ、等)が具備されている。前記自動検体処理装置は、搬送ホルダ通信機能、即ち前記搬送ホルダと近接通信手段等を用いて通信する機能を具備している。
【0131】
本体制御部に具備された搬送ホルダ通信機能検体と、搬送ホルダに具備されたホルダ内制御部の間の通信(近接通信手段、等)を通じて、以下の手順で通信・命令の送信を行う。
(1)ステップ1:搬送ホルダの固有IDを確認する。
(2)ステップ2:搬送ホルダが固有IDを記憶していない、あるいは、他の搬送ホルダと重複したアドレスを割り振られている場合には、新しい固有アドレスを割り付ける。
(3)ステップ3:搬送ホルダの、動作シーケンスを定めた命令を送信する。
【0132】
搬送ホルダ内制御部には、さらに、前記の温度調節機構の動作シーケンス,攪拌機構の動作シーケンスをプログラミング可能な機能が具備されている。このようなプログラミングは、本体制御部のホルダ通信機能を通じて、必要なタイミングで随時行われる。
【0133】
このようにして送信された温度調節機構の動作シーケンスを定めたプログラム(温度調節プログラム)には、個々の時刻における検体温度の目標値;yc0(t)が定められている。搬送ホルダ内制御部は、yc0(t)に基づいた電圧出力あるいは電力出力;xc(t)を温度調節機構に印加することで、温度調節機構に対し電力の供給と制御を行う。
【0134】
搬送ホルダが、温度センサ(図示しない)を具備していて搬送ホルダ内制御部が温度センサの値を解釈する機能を具備していても良い。この場合には、温度センサの出力値と、動作シーケンスに定められた値との偏差sc(t)を最小とするようにフィードバック制御することができる。
【0135】
また、必要に応じ、温度センサの出力値と、動作シーケンスに定められた値との偏差(sc(t))を記憶して、通信手段を介して外部に送信しても良い。これによって温度制御の異常(オーバーシュート,発振等)の有無を定期的に監視できる。
【0136】
同様に、攪拌機構の動作シーケンスを定めたプログラム(攪拌制御プログラム)には、個々の時刻における制御回路の出力値xm(t)が定められている。必要に応じ攪拌の強度を搬送ホルダ上でモニタする機能(加速度センサやピエゾ素子等)を具備していても良く、このような場合には攪拌強度をフィードバック制御することができる。
【0137】
搬送ホルダと自動検体処理装置の本体制御部との通信手段の別の形態としては、搬送ホルダおよびシステム床部に近接通信手段を備える代わりに、システムに備わるガイド電極と搬送ホルダに備わるホルダ電極を介して、搬送ホルダを駆動するための電力と同時に、信号を送信して処理シーケンスを制御する方法も考えられる。
【0138】
このような方式としては、信号多重化の技術が考えられる。このようが技術を用いることで、同一搬送路上に存在する複数の搬送ホルダの動作を、独立に制御することが可能である。方法としては、命令(コマンド)をデジタル信号を用いて有線で送信し、かつ電力搬送電圧を変調することで、電力とデジタル信号を一律かつ一斉に送信するDigital Command Control(DCC)制御方式を用いる。以下、具体的な方式を、説明する。
【0139】
この場合は、本体制御部720から送信される情報の伝送単位、即ちパケットは、デジタル信号の集まりである。すなわち、本体制御部720からは1と0の2つの状態だけからなる量子化された信号が、全ての搬送ホルダに対し一斉に伝達される。
【0140】
1と0の状態は、電圧信号を用いて表現する。このような方法には従来から様々な方法が(例えば特許文献10,11)知られているが、ここでは、一定振幅の矩形状パルスの、パルス長を用いて、1と0の状態を表現する矩形のPulse Width Modulation(PWM)信号を用いることにする。
【0141】
具体的には「0」を伝達するときは一定の基準値よりも長いパルスを、「1」を伝達するときには一定の基準値よりも充分短いパルスを出力することにする。パケットを送信しない場合であっても、搬送ホルダに対して矩形パルスを印加しつづける必要があるため、「1」に相当するパルスを送信することにする。
【0142】
次に、パケットの構成について、説明する。搬送ホルダのホルダ内制御部には、いくつかのデコーダが具備されている。デコーダとは、前記のPWM信号を解釈して、温度調節素子や攪拌素子等の、搬送ホルダに具備された機能を制御する機能のことである。
【0143】
それぞれのデコーダにはそれぞれのデコーダ固有の固有識別符号(固有ID)が割り付けられているものとする。つまり、例えば一つの検体ホルダに2つのデコーダが具備されていた場合には、この2つのデコーダの固有IDは異なるものが割り付けられる。他の搬送ホルダのどのデコーダとも別のアドレスが割り付けられている。
【0144】
次に、本形態の場合に本体制御部720の搬送ホルダ通信機能が、発信する信号パケットの構成について説明する。本発明の形態における信号パケットは、少なくとも、プリアンブル部と、アドレス部と、命令部との3つの種類の信号から構成されている。プリアンブル部は、パケットが今から送信されることを示すための信号である。アドレス部は、どの搬送ホルダに対する命令かを識別させるための信号であり前記固有IDに対応する。命令部は、「温度を50℃にせよ」等といった具体的な命令を伝達するための信号である。尚、信号伝達のミスを検出,訂正するための誤り訂正部を具備していても良い。
【0145】
プリアンブル部が必要な理由は、パケットの送信をしない場合には「1」に相当する信号が常に送信され続けているため、どこまでが、単に、電力を送信するためのパルスなのか、どこからが、パケットの開始なのかを識別する必要があるからである。
【0146】
さて、搬送ホルダに温度調節機構1つと、攪拌機構1つが具備されているものとし、それぞれに対応したデコーダ、即ち温度調節制御デコーダと攪拌制御デコーダが1つずつ、ホルダ内制御部に具備されている場合を一例に、デコーダの実装や構成について説明する。
【0147】
これらのデコーダそれぞれには、少なくともVcc電極とGND電極,Vout電極の三種類の電極があり、デコーダのVcc電極を上側のホルダ電極140に、デコーダのGND電極を下側のホルダ電極150にそれぞれ接続する。
【0148】
Vout電極は、制御対象である温度調整機構や攪拌機構に電力を供給,制御するための電極で、温調用デコーダのVout電極は温度調節素子に、攪拌用デコーダのVout電極は攪拌素子430に接続されている。
【0149】
本発明の自動検体処理装置に具備された本体制御部720には、個々の搬送ホルダに具備されたデコーダそれぞれに、固有のアドレスを割り付けるアドレッシング機能と、個々のデコーダに出すべき命令を複数記憶する手段と、命令を、前記の信号パケットに変換する手段を具備し、さらに前記信号パケットや、電力送信のための連続信号(即ちこの場合は連続した「1」)を、PWM信号として送信する機能を具備している。
【0150】
次に、信号伝達経路及び信号解釈の仕組みを、図6のように、上側のホルダ電極と上側のガイド電極が物理的・電気的に接触し、下側のホルダ電極と下側のガイド電極が物理的・電気的に接触した状態において説明する。
【0151】
前記のパケットは、前述のように、全てのデコーダに一斉に送信されるため、全ての搬送ホルダの全てのデコーダは、常時前記PWM信号を、電力を得るために使用すると同時に、パケットがされていないかを常に監視する。そして、パケットのプリアンブル部に相当する信号が送信されたことを確認した場合には、その次に続く前記のアドレス部が、自分あてのものであるか否かを判断する。そして、自分宛であれば、その次に続く命令部分を解釈しその操作入力内容を実行し、Vout電極に対して、電力を電圧出力する。この出力電圧値によって、温度調節デコーダは、温度調節機構の動作を制御し、攪拌制御デコーダは、攪拌機構の動作を制御する。
【0152】
尚、前記デコーダの出力電圧即ち、Vout電極から出力される電圧は、アナログ出力でなくてもよく、PWM出力であってもよい。即ち一定振幅の電圧V(t)を、矩形状に出力し、V(t)の、一定時間あたりの積分値が、所望の電圧となるように、出力する形態をとってもよい。デコーダの出力電圧にもPWM出力を用いると、アナログ出力をする場合に比べ、回路構成が簡単になるといったメリットがある。また、PWM出力をアナログ出力に変換するには、ローパスフィルターを用いればよいので、PWM出力ができれば、アナログ出力も可能である。
【0153】
尚、搬送路の交差点では、一瞬、電力および信号が途切れる場合がありえる。このような事態を避けるため、搬送路の交差点にガイド電極を具備したガイドを設置しても良い。
例えば、分枝機構のアーム部に、ガイド電極を具備すれば、このような機構が実現できる。
【0154】
上記方法によって、検体の温度調節や攪拌処理を搬送ライン上で実施し、かつ、独立に制御ができる検体搬送ホルダ及び、そのような検体搬送ホルダを搬送する搬送ラインを作成できる。また上記方法によれば、圧力印加や磁場印加,電場印加といった処理,CCD素子等による測定等が搬送ホルダごとに独立に制御可能である。磁場印加,電場印加,圧力印加が有効な事例の一例を以下にリストする。
電場印加:ゲル泳動,電気化学発光,電気分解等
磁場印加:磁性ビーズの凝集,分散
圧力印加:マイクロ流路を用いたデバイスの流路に差力圧を加えることで、液体やゲルを流路上で流す場合。
【0155】
また、自走に必要なモータや車輪,ギア等を搬送ホルダに備えれば、搬送ホルダの自走制御が可能な検体搬送システムとすることもできる。実現のためには、温度制御用デコーダ,攪拌制御用デコーダに加えて、搬送制御用デコーダを備え付けることにより、搬送方式をベルトライン方式に代え、自走方式に変更することもできる。
【0156】
また、通信手段としてもラジオコントロール等様々な方法が考えられる。一部の機能をDCC制御により制御し、他の機能を近接通信で制御するといった方法も考えられる。
【0157】
以上の方法で、本体処理部と本体留置部の間を往復し、本体処理部で処理又は測定を行う必要があるときだけ、必要な検体を本体処理部に取り出すことができることを特徴とした自動検体処理装置が実現される。また、本体留置部,本体処理部問わず様々な場所で反応を中断することなく継続することや、逆に反応を律束することもできる。
【実施例1】
【0158】
図8の本体処理部と、図11の本体留置部と、本体制御部を具備した自動検体処理装置に、搬送ホルダで独立制御可能な加熱機構を具備している場合を一例として、当該システムの処理シーケンスの一例を説明する。尚、図8の本体処理部のオンライン処理ユニットは、複数の試薬を切り替えて分注可能な分注器であるものとする。
【0159】
本例においては、検体の処理プロトコールが以下の通りであって、番号順に処理が行われる場合を考える。
1.当該システムへの検体ホルダの投入
2.検体への試薬の分注
3.検体ホルダを本体留置部へ移動
4.検体ホルダ上の加熱機構による加熱開始
5.本体留置部(セルユニット)からの取り出し動作を開始する条件
6.加熱終了
7.検体ホルダを検体収容部に収納
【0160】
まず、上記の処理シーケンスを、個々の処理の開始,終了条件がFirst-Come First-Served(FCFS)方式で決定する場合を一例に、検体処理のアルゴリズムを、1つの搬送ホルダ検体に着目して説明する。図14に、検体処理のアルゴリズムの一例をフローチャートで示す。
【0161】
このアルゴリズムでは以下のステップに従って判断をする。これらの内容は、検体の処理時には、本体制御部のスケジューリング機能に記憶されているものとする。また、搬送ライン上には、センサやバーコードリーダ等が適切な位置に配置され、適当なタイミングで搬送ホルダの情報および位置を確認できるものとする。搬送ホルダの位置を確認する場合、様々な配置が考えられるが、センサやバーコードリーダは、例えば、全ての分枝機構、ストッパにこのような機能が具備され、さらに、どの搬送ラインにも、上流側,下流側末端にはこのような機能が具備されていればよく、具体的な配置は図示しない。
【0162】
(1)ステップ1410:検体を当該システムに投入する。
本体制御部は、投入しようとする検体が投入部の搬送ライン1200(a)−(d)のいずれかの最前であり、他の搬送ラインにより優先順位の高い検体がないこと、および、当該検体の検体処理プロトコールで決定される次の搬送先に対して検体が搬送可能であること、を判断し、確認された場合には検体の投入を開始する。
【0163】
投入された検体ホルダは、オンライン処理ユニット(分注器など)や本体留置部(セルユニット)へと搬送される。
【0164】
搬送先が分注器である場合には、少なくとも以下の条件が満たされているときに搬送可能であると判断する。このようにすることで、渋滞,ホルダ同士の衝突等が回避される。
(A)先に分注器の使用を待っている検体が一定数以下であること(例えば5個)。
(B)分注器での処理を終え、本体留置部へ移動中(あるいは本体留置部への移動を待 機中)の検体が一定数以下(例えば3個)であること。
(C)搬送ライン910上に他の搬送ホルダがないこと。
【0165】
搬送先がセルユニットの場合には、少なくとも以下の条件が満たされているときに搬送可能であると判断する。このようにすることで、渋滞,ホルダ同士の衝突等が回避される。
(A)目的とするセルユニットに留置されている検体の個数(待機している検体数)が 一定数以下(例えば20個)であること。
(B)搬送ライン910上に他の搬送ホルダがないこと。
【0166】
なお、これらの条件を満たさない場合、検体は当該システムには投入されず、投入部に待機するよう制御される。
【0167】
(2)ステップ1420:分注器により試薬の分注動作を開始する。
検体がステップ1410により当該システムに投入された後は、本体制御部(は当該検体の処理プロトコールに指定された、使用する試薬の種類と量を確認する。使用する試薬がオンライン処理ユニットに在る場合、当該検体がストッパ816によって、分注器(オンライン処理ユニット815)の前に停止すると、試薬を吸引した分注ノズルが容器内部に挿入されていることを検知して検体に試薬の分注を行う。
【0168】
試薬の分注が指示されない検体については、ステップ1420は実行されずにステップ1430、もしくはステップ1440が実行される。
【0169】
(3)ステップ1430:検体ホルダを本体留置部へ移動する。
ステップ1410により当該システムに投入された検体であって、処理が指示されていない検体については投入処理の完了を、ステップ1420により必要な試薬が分注された検体は、試薬分注の終了および分注ノズルの引き上げを確認する。
【0170】
これらの処理の完了が確認されると、本体処理部は当該検体を留置するセルユニットを選択する。選択されたセルユニットへの搬入条件を満たしていること、必要な場合には近接通信手段817による搬送ホルダへの処理プロトコール(加熱処理や攪拌処理など)の指示が終了していることを確認して、本体貯留部への検体ホルダの移動を開始する(ストッパ816をOFFにする)。この際には、「<セルユニットの制御方法>」にて先述の方法等で、本体留置部への移動が行えるよう、あらかじめ搬送に要する各機構(ストッパ,分枝機構など)の制御方法が記憶されているものとする。
【0171】
なお、セルユニットの選択方法は、各セルユニットに均等に検体ホルダが搬入されるように搬送する方式が一例として考えられる。この方式においては、本体留置部に搬入された検体がセルユニット1110(a)に留置された場合、次の検体ホルダはセルユニット1110(b)に留置し、更に次の検体はセルユニット1110(c)に留置するというふうに、セルユニット1110(a)→セルユニット1110(b)→セルユニット1110(c)→セルユニット1110(a)→・・・の順に留置先を、サイクリックに切り替える。いずれかのセルが満杯となった場合には、満杯になったセルは留置先の候補から外すことにする。
【0172】
その他の方法としては、留置時間の残時間が同程度の搬送ホルダが同じセルユニットに搬入されるよう搬送する方式が考えられる。この場合には、留置時間が長い検体を保持するセルユニットは駆動させることなく安定して保管できるメリットがある。また、他の方法としては、セルユニットに配置された検体ホルダの留置残時間の合計が最小となるセルユニットに搬入されるよう搬送する方式や、検体ごとに行き先を固定する方式等が考えられる。いずれの方式で搬送するかについてはシステムの運用形態や搬送する搬送ホルダの総数などを比較考慮して決定することが望ましい。
【0173】
なお、これらの確認がされない場合には検体ホルダを本体留置部には移動させず、現在の位置で待機させる。
【0174】
(4)ステップ1440:検体に対する加熱を開始する。
ステップ1410により当該システムに投入された検体,ステップ1420により分注器による検体への試薬の分注が完了した検体に対し、近接通信手段による搬送ホルダへの加熱条件の指示がされたことを確認し、加熱開始命令を発する。
【0175】
加熱指示があった場合には、本体制御部によって指示された処理プロトコールに従って検体ホルダに設置された加熱機構を制御し、所望の温度変化を検体に与える。プロトコールに予め定められた加熱条件としては、「加熱温度」「昇温,降温条件」「加熱時間」といったパラメータが搬送ホルダのホルダ内制御部に記憶され、これに従って加温機構は検体の加熱処理を行う。
【0176】
これらの判断条件が全てOKとなった場合、他に異常検知等なければ加熱を開始OKとする。NGの場合には再度判断する。再度判断するタイミングとしては例えば、一定時間待って同じ判断を行うか、あるいは、判断条件に入っている内容に関連した命令やフラグの発行が行われるごとに再度判断する等の方法が考えられる。
【0177】
(5)ステップ1450:検体に対する加熱時間のカウントダウンを開始する。
ステップ1430によって本体留置部に移送された搬送ホルダは、本体制御部から指示された処理プロトコールに基づいて本体留置部で待機する時間が予め決定されている。本体制御部には、本体留置部での各搬送ホルダの留置時間を監視する留置時間監視機能(タイマーなど)が具備されおり、ステップ1440により検体の加熱開始後、前記留置時間監視機能は各検体について加熱開始から所定の時間が経過したことを監視する。即ち、ステップ1440で加熱が開始され次第、プロトコールに記載の加熱時間からカウントダウンを開始する。
【0178】
(6)ステップ1460:加熱終了フラグの発行。
処理プロトコールに定められた加熱時間が経過した検体には、前記留置時間監視機能によって、加熱終了フラグが付与される。加熱時間は、加熱開始命令が発行されたと同時にカウントダウンされ、残り時間が規定値(例えば30秒程度)以下になった、加熱が殆ど終わった段階で、検体毎に加熱終了フラグが付与される。
【0179】
(7)ステップ1470:本体留置部からの取り出し動作を開始する。
検体本体留置部(セルユニット)からの取り出しのアルゴリズムを以下説明する。判断条件、及び判断項目は以下の通りである。
○ループから取り出す条件
(A)加熱が、ほぼ終了していること(検体ステップ1460の加熱終了フラグが付与さ れていること)。
(B)ストッパ1022で停止している搬送ホルダの個数が一定以下であること(例えば 1個)。
(C)同一ループ内に、先に加熱処理が終了した検体がないこと。
○セルユニットから取り出す条件(ストッパ1022をOFFにして、搬送ライン930に検体を流す条件)
(A)搬送ライン930上に、他の検体が存在しないこと。
(B)分注器の待ち行列が一定数以下であること。
(C)他のセルユニット上に、ループから取り出され、かつ、セルユニットからは取り出 されていない検体で、かつ優先順位が自分より高い検体がいないこと。
【0180】
ここで、ループから取り出された状態とは、搬送ホルダがループ外、すなわち分枝機構1021よりも下流側にいる状態で、かつ、かつストッパ1022にて停止され、セルユニット外には出ていない状態を指す。
【0181】
優先順位は、先に加熱終了フラグが付与された検体を優先して順位付けられる。複数の検体に対して同時刻に加熱終了フラグが発行された場合には、あらかじめセルユニットの優先順位を定めておき(例えば、(c),(b),(a))、これに従って検体搬送の優先順位を定める。別の優先順位の設定方法としては、加熱終了フラグを付与した検体をより多く含むセルユニットの検体を優先するという方法も考えられる。
【0182】
(8)ステップ1480:加熱を終了する。
加熱終了フラグが発行されたあとも、加熱時間のカウントダウンを継続して行い、検体加熱時間が終了した場合には、検体ホルダに設置された加熱機構は加熱を停止する。
【0183】
(9)ステップ1490:検体を検体収容部に収納する。
全ての処理が終了した検体を搭載した検体ホルダは、検体収容部に収納される。異常検知以外特になし。異常検知とは、例えばどこかのストッパが故障して、本体収納部に移動できない等といった、異常な事項の有無を判定することを指す。当然、他の条件に対しても、必要に応じこのような条件は設定されているものとする。異常検知後の例外処理は、別途定められているものとする。
【0184】
尚、上記個々の条件が指示された際の、搬送ホルダ,搬送系,オンライン処理ユニットの制御方法については、予めいくつかのパターンが記憶されている事が望ましい。前記のパターンは、装置状況や処理プロトコールにおける設定等を引数とする可変のパラメータをいくつか持っていてよい。
【0185】
上記の個々の条件がOKの場合には、図14のフローチャートに従って、検体搬送処理が進んでいく。ステップ判断がNGの場合には、例えば、一定間隔で再度判断を行う、あるいは判断条件に入っている内容に関連した命令やフラグの付与が行われるごとに再度判断する等の方法が考えられる。
【0186】
尚、通常の分注直後には攪拌工程が入り、分注回数も数回であることが多い。攪拌工程が入る場合には、加熱条件と同様の方法で攪拌のタイミングを別途定義すればよく、分注回数が増える場合には、該当するステップを分注回数繰り返せばよい。
【0187】
本体処理部での検体処理の、個々の処理の開始,終了条件の決定方法にはFCFS方式以外にも様々な方法が考えられる。例えば、ジョブショップスケジューリング問題(例えば非特許文献4等)を応用した制御方式も考えられる。このような方式の一つの形態としては、本体留置部およびその周辺の搬送系,処理部及びその周辺の搬送系を、それぞれ一つのジョブショップと考え、本体留置部は搬送ホルダを留置できる個数だけ並列処理可能とした条件下で、例えば検体が投入部に投入された時点で、随時、待ち時間の総和や、全体の処理時間等を最小とするジョブショップスケジューリングを作成し、そのスケジュールに基づいて処理を進めていく方式が考えられる。
【実施例2】
【0188】
本発明の一つの形態を例として説明する。
【0189】
オンライン処理ユニットは多数の試薬を切り替えて分注可能な分注器とし、搬送ホルダは搬送ホルダごとに温調,攪拌を独立に制御できるものとする。尚、処理のアルゴリズムは、実施例1の方法とほぼ同様であるので、説明を略す。
【0190】
検体に対して典型的な検体処理工程、即ち、加熱,攪拌,分注の繰り返しからなる処理工程を実施するものとする。但し、検体毎(測定項目毎)に処理時間,分注間隔,加熱温度,攪拌タイミング,攪拌強度がまちまちであるものとする。また、処理プロトコールの加熱処理時間は、総じて長い傾向にあり、場合によっては、加熱中に攪拌をしつづけるプロトコールもあるとする。
【0191】
まず、本発明の搬送ホルダは、搬送ライン上で加熱,攪拌をいつでも行うことができ、かつ搬送ホルダごとに独立の条件で制御できる。多くの検体処理は、分注,攪拌,加熱のみを繰り返す工程を含むが、このような場合においても、加熱,攪拌は搬送ホルダ上でできるため、搬送経路としては、分注器と、本体留置部との間の搬送経路のみを考えればよい。従って、搬送経路,搬送制御は極めて単純である。
【0192】
また、同じ分注器を使いまわすことができるので、必要となる分注器の台数が少なくて済む。
【0193】
また、分注するタイミングにおいてのみ、本体留置部から取り出し、分注が終わればただちに本体留置部に戻せばよいので、分注器、従来の逐次処理型とほぼ同様に、検体ごとに、必要な試薬を分注していくのみでよく、分注器の制御も簡単である。
【0194】
分注器と、本体留置部との間の搬送ホルダのやりとりは必須であるが、分注1回に要する時間は、加熱時間に比べ極めて短いため、本例のような配置にすれば、処理時間に与える影響は殆どない。万一、分注器に対して大量の検体がつかえるようなことが想定される場合には、分注器の数を増やし、並列処理にしてもよい。
【0195】
また、本体留置部から所望のタイミングで検体を取り出す手順も、前述のように、基本的には分枝機構と、ストッパのタイミング制御のみで尽きるため、比較的単純である。
【0196】
さらに、このような場合でも、前記本体留置部は、前記の手順によると、所望のタイミングで、所望の検体のみを、搬送ホルダに装着したままの状態で取り出すことができ、かつ、搬送ホルダは、ベルトラインから離れることなく取り出すことができるので、どのタイミングにおいても、加熱,攪拌を途切れることなく行える。従って、反応制御がより細かくできる。
【0197】
また、搬送手段,取り出し手段,留置手段は、ベルトラインと、周辺機能(分枝機構やストッパ,ベルトラインの駆動制御回路等)のみで全て実現可能であり、従って移載器を必要としない。従って容器を移載器のチャック機構で掴み、搬送ホルダから取り出し、バッチ型の加熱装置や攪拌装置に装着し、さらに処理が終わった後に、加熱装置や攪拌装置から取り出し、さらに搬送ホルダに戻すといった手間が不要である。この手間は、制御アルゴリズムを複雑化するだけではなく、処理時間が、移載器の処理速度に律束されることになる。そのため、スループットの観点から不利であり、また、移載器を用いた移載は、容器を宙釣りにするため、特に容器が高温である場合や、逆に結露が生じている場合には、事故のリスクが考えられる。これに対して本実施例に開示された自動検体処理装置では、処理の過程でチャック機構を用いた検体移載工程がないため、スループットの観点およびリスクの観点からもバッチ方式による加熱・攪拌機構を用いる場合に比べ有利である。
【0198】
スループットの観点から分注器の台数を増やす必要がある場合には、分注器を並列に並べて、到着順に交互に分注器を使い分ける方法や、一つの搬送ラインに複数の分注器を直列並べる方法などが考えられる。分注器を直列並べる場合の一例として、分注器を例えば2つ並べた場合には、2つの検体を到着順に同時に分注器にセットして、2つとも処理が終わった時点で、次の2つを、到着順に同時に分注器にセットする等の処理方法が考えられる。
【実施例3】
【0199】
本発明の自動検体処理装置が有効な他の具体例として、検体中の特定の物質に対して、選択的に吸着する磁性ビーズを用いて、検体中の特定の物質を濃縮,分離する場合であって、特に複数の容器間で磁性ビーズを移動させる工程を実現する場合を説明する。尚、処理のシーケンス,全体のワークフローは、実施例1の方法と同様なので、説明を省略する。
【0200】
磁性ビーズの移動を用いた物質の濃縮が行われる場合の一例としては、磁性ビーズによる核酸分離手段等が考えられる。磁性ビーズによる核酸分離手段としては、よく、5本の容器に検体や試薬をいれておき、その間で、磁性ビーズや反応液を移動させる方法が取られる。大まかには、以下のような工程が取られる(例えば特許文献7,8,非特許文献1)。
(1)ステップ1:第1の容器に、血液等の検体と、Lysis Bufferや、Protease K等の核酸を水溶させるための試薬等を混ぜ合わせる。
(2)ステップ2:適当な条件で一定時間、加熱することで核酸水溶液(この溶液にはタンパク質等の不純物が多く含まれる)を作る。
(3)ステップ3:核酸水溶液を、第2の容器から吸引し、第二の容器に吐出する。その後第3の容器に核酸分子と吸着する性質を持つ磁性ビーズを混合する。
(4)ステップ4:適当な条件で攪拌・加熱させて、前記磁性ビーズと核酸粒子が結合させる。
(5)ステップ5:その後、第二の容器から、磁性ビーズを捕獲する。並行して第三の容器には洗浄液を分注する。これらの作業の後、磁性ビーズを第三の容器に分散させる。
(6)ステップ6:その後、適当な条件で第4の容器を加熱・攪拌する。この結果、磁性ビーズ等に付着した不純物は、洗浄液中に分散あるいは溶出する。
(7)ステップ7:第4の容器に洗浄液を分注する。
(8)ステップ8:第三の容器および第四の容器を用いた作業によって、核酸を吸着した磁性ビーズ等から不純物を洗い落とされる。
(9)ステップ9:最後に第五の容器に、シリカと核酸の吸着を切るためカオトロピック塩の濃度を下げられる環境を入れておき、この中に攪拌棒によって第四の容器から回収された磁性ビーズを分散させ、必要に応じ適当な条件で加熱・攪拌させる。その後、攪拌棒で再度磁性ビーズ(核酸との吸着が切れた磁性ビーズ)を回収すると、第五の容器内には、高濃度,高純度の核酸溶液が得られる。
【0201】
即ち、典型的な磁性ビーズによる核酸分離手段においては、5本の容器の間で、反応液や磁性ビーズを移動させながら、核酸分離を行うため、本発明の形態の装置においては、5本の容器を1セットとして搬送する手法が、管理面で効率が良い。
【0202】
従って、本実施例における搬送ホルダ(5本ラック)は、5本の容器を同時に装着でき、それぞれの検体を独立に加熱,攪拌する機構が搭載されているとする。また、当然、本体留置部,本体処理部,本体制御部は具備していて、本体留置部,本体処理部を構成する搬送ラインを含む全ての搬送ラインは、5本ラックを搬送できるよう設計されているものとする。
【0203】
また、本体処理部のオンライン処理ユニットとしては、前記5本ラックに装着された容器間で、磁性ビーズを移動する手段と、分注器と、開栓器を具備している場合を一例とする。
【0204】
本発明の形態における5本ラックの構造,構成について説明する。本発明の形態における図15に5本ラック断面を模式的に示す。図16に、前記5本ラックの検体装着部全てに容器を装着した状態を示す。
【0205】
本発明の形態における5本ラックは、5つの検体装着部1510(a)−(e)を具備している。
【0206】
また、それぞれの検体装着部それぞれに、温度調節素子1520(a)−(e)と、攪拌素子1530(a)−(e)を、それぞれ一つずつ具備している。
【0207】
図16においては、5つの検体装着部1510(a)−(e)に、容器1610(a)−(e)がそれぞれ装着されている。
【0208】
また、それぞれの温度調節素子と、攪拌素子を制御するための制御部を具備している。
【0209】
さらに、搬送ホルダ下部の外周には、図1の搬送ホルダと同様のホルダ電極2種類が、それぞれ、搬送ホルダの周りを1周するように具備されている(図示しない)。
【0210】
さらに、図1の搬送ホルダと同様の電源部や、近接通信手段が具備されている。これらの役割については、図1の搬送ホルダと同様なので、詳細な説明を略すが、5つの温度調節素子,攪拌素子はそれぞれ独立に制御可能であるものとする。
【0211】
また、搬送ホルダにおいては、磁性ビーズを混入した容器を装着する予定の容器装着部には、磁性ビーズを分散させるための磁場を印加する機構が備わっていても良い。
【0212】
本発明の本体処理部,本体留置部等を構成する搬送ラインの配置は、本体処理部は図8、本体留置部は図11と同様である。但し、5本搬送ラックは、縦方向と横方向の長さが異なるため、搬送ラインの幅は、縦方向の搬送ラインと横方向の搬送ラインとでは当然異なるものとせねばならない。本実施例の形態では搬送ライン810,搬送ライン1040及びの方向を横方向とし、搬送ライン930及び800の方向を横方向とする。即ち、本体処理部に前記5本搬送ラックが装着され、5本搬送ラックがストッパ816によって停止させた状態においては、搬送ラインの下流側から眺めた場合に、左から順に検体装着部1510(a)−(e)の順に並ぶものとする。
【0213】
図17に本発明の形態において使用される栓(磁性ビーズ捕獲栓)を装着した容器の模式図を示す。この栓は、磁性ビーズ捕獲において、重要な役割を担う。このような栓は、5本の容器のうち、少なくとも1つの容器に装着されるものとする。
【0214】
本発明の磁性ビーズ捕獲栓は、試験管容器等の栓として使われる通常のゴム栓と同様の構造をした、可撓性の樹脂で作成された部分(可撓部1700)を具備している。可撓部は、通常のゴム栓と同様の原理で、容器に蓋をする。本発明の磁性ビーズ捕獲栓は、前記可撓部に、樹脂で作成された筒1710を貫通させた形態をとっている。
【0215】
筒1710は、内部に中空部1720を持ち、上端に開口部1721をもち、内部の中空部に侵入する手段は、上端の開口部1721のみである。栓の中空部には、細い棒で、先端部に磁石1910が装着された棒(磁石棒1900)を挿入することができる。図19に、磁石棒を容器に装着した磁性ビーズ捕獲栓の中空部に挿入した状態を示す。
【0216】
容器内の溶液中に磁性ビーズ等の磁性ビーズ1820が分散している場合、磁性ビーズ捕獲栓を容器に装着した状況下において、磁石棒1900を挿入すると筒1710の先端を貫通する磁束の本数が多くなるため、磁石棒の先端に磁性ビーズが付着する。
【0217】
この状態で、図20のように磁性ビーズ捕獲栓を抜き、隣の容器に装着すると、隣の容器に磁性ビーズが移動する。この状態で、磁石棒1900のみを抜くと、磁石棒1900から、磁性ビーズが筒から離れる。
【0218】
尚、好ましくは、磁性ビーズ捕獲栓の可撓部は柔軟で、筒部をある程度自由に傾けることができることが望ましい。図21に、筒部を傾けた状態を示す。このように、筒部を自由に傾けることができるようにすることで、磁性ビーズの捕獲やリリースが、より確実に行えるようになる。
【0219】
容器1610(a)−(e)のうち、容器1610(a)には全血または血清等の検体が入っていて、前記の磁性ビーズ捕獲栓が、あらかじめ装着されている。容器1610(b)−(e)は、あらかじめシール栓で栓されているものとする。この場合には容器1610(b)−(e)のシール栓を開栓する機能(シール開栓器)がオンライン処理ユニットに具備されている必要がある。尚、容器1610(b)−(e)には、あらかじめ何らかの試薬が入っていてもよい。
【0220】
本形態における自動検体処理装置は、磁性ビーズを移動する手段を実現するために、オンライン処理ユニットは以下の特徴を具備した磁性ビーズ捕獲ユニット(図示しない)を具備している。
(1)磁性ビーズ捕獲栓の可撓部の外側をチャックする機構と、容器外壁をチャックする機構。
(2)チャック機構それぞれが可撓部外側と、容器外壁をそれぞれチャックした状態において、磁石棒を筒内に挿入または持ち上げる手段。
(3)栓を容器に装着(閉栓)する手段および容器から取り外す手段(開栓)。
【0221】
さらに好ましくは、以下の(4)を備えていても良い。本実施例では備えているものとする。
(4)チャック機構それぞれが磁性ビーズ捕獲栓の可撓部の外側と、容器外壁をそれぞれチャックした状態で、筒先端が容器内で検体溶液に浸された状態において、筒部を自在な方向に傾斜させる手段。
【0222】
本発明の形態におけるオンライン処理ユニット815は多数の試薬を切り替えて分注可能な分注器を具備している。この分注器は容器内の検体溶液を吸引・吐出することも可能とする。
【0223】
さらに、分注器と磁性ビーズ捕獲ユニット、開栓器は、本体処理部のある特定部分に停止した5本ラックのどの搬送ホルダに装着された容器にも、交互にアクセス可能である。
【0224】
以下、本形態におけるオンライン処理ユニットの動作を、容器1610(b)に、磁性ビーズが入っていて、容器1610(b)から容器1610(c)に磁性ビーズを移動する工程を一例として説明する。この動作はストッパ816の位置に停止した状態で行われる。また、磁性ビーズ捕獲栓は容器1610(b)に装着された状態を前提としている。
つまり、もともと容器1610(a)に装着されていた磁性ビーズ捕獲栓が容器1610(b)に装着しなおされ、現在は容器1610(b)に装着された状態を前提とする。この動作も、以下に説明する方法と同様の方法でできる。
(1)ステップ1:シール開栓器が容器1610(c)にアクセスし、容器1610(c)のシール栓を開栓する。
(2)ステップ2:必要に応じ、分注器を容器1610(c)にアクセスさせ、必要な試薬を容器1610(c)に注入する。
(3)ステップ3:磁性ビーズ移動手段のチャック機構で容器1610(b)と、磁性ビーズ捕獲栓をそれぞれチャックし、栓の中空部に磁石棒を挿入し磁性ビーズを磁石棒に対し磁気的に吸着させる。
(4)ステップ4:ステップ3の状態で、容器1610(b)を開栓する。
(5)ステップ5:磁性ビーズ移動手段のチャック機構で容器1610(c)をチャックし、前記磁性ビーズ捕獲栓を、容器1610(c)に装着する。
(6)ステップ6:ステップ5の状態で、磁石棒を抜く。
【0225】
上記ステップ1〜6によって、磁性ビーズを隣の容器に移動させる工程が実現できる。
他の組み合わせにおいても同様に磁性ビーズの移動作業ができる。また、容器内で反応を行い、反応の結果が後工程の検査において問題となる容器、即ち、外部からコンタミネーションが発生すると問題となる容器には、全て、栓がなされているためコンタミネーションの回避が可能である。例えば、容器1610(c)から、磁性ビーズを容器1610(d)に移動させた後には容器1610(d),(e)にコンタミネーションが生ずるとその後の工程に影響を及ぼす。容器1610(c)から磁性ビーズを容器1610(d)に移動させた後には容器1610(a)−(c)は、必要に応じて保管することも考えられるが、通常は、この後直ちに破棄しても問題ないものである。容器1610(a)−(c)にも栓をすることが望ましい場合には、別途閉栓器を設け、必要に応じ、適当な栓を用いて閉栓すればよい。
【0226】
ホルダごとの処理シーケンスは、実施例1の場合と同様で、前記処理プロトコール(1)〜(9)を、ストッパやオンライン処理ユニットの動作シーケンスに変換した形で本体制御部に記憶させておけば、上記(1)〜(6)のような処理シーケンスが実現される。
従って、搬送経路の肥大化の防止や逐次処理の実現等のメリットが発生する。
【0227】
さらに、従来のバッチ方式では、磁性ビーズの移動工程は、隣に別の検体が存在する状況で行われるのが普通であったが、本例の方法では、スループットが確保でき、且つ隣に他の検体がないためクロスコンタミネーションのリスクは大幅に下がる。
【0228】
また、開栓と、ビーズ移動を同一のアクチュエータで行えるためアクチュエータの数が節約できる。さらに、磁性ビーズの移動時に用いられる、磁石と反応液との直接的な接触を防止させるための樹脂製の筒は、1セットの処理に対して1つですむため、消耗品の節約,感染性廃棄物の低減ができる。
【0229】
磁性ビーズの捕獲手段の他の形態としては、たとえばボールペンのノック機構等と同様の機構で磁石を上下させる手段具備した棒を用いた捕獲手段が考えられる。前記棒の先端部には、プラスチック又はゴムのカバー着脱できるものとする。このようにすると、磁石は、プラスチック又はゴムのカバー内を移動でき、磁石を突き出した状態では、カバーを透過した磁場によって、磁性ビーズがカバー表面に磁気的に吸着し、引っ込めた状態では、カバーを透過した磁場が殆どないため、カバーに吸着した磁性ビーズはカバーから離れる。このような形態をとると、カバーは、検体と触れるため、随時使い捨てることが望ましい。カバーの着脱は、通常の分注器のディスポーザルチップと同様の方法で着脱することが考えられる。
【0230】
場合によっては、先端部を、ディスポーザルとせず、例えば、高濃度(〜1M)の塩酸等、核酸分子を数塩基程度のフラグメントに分解することができる液体で洗浄して、再利用してもよい。
【0231】
このような機構を備えた棒を、ロボットアーム等の先端に取り付け、ストッパなどによりベルトライン上に停止した容器にアクセスできるものを、磁性ビーズ捕獲手段として用いても良い。
【実施例4】
【0232】
本発明の自動検体処理装置において、オンライン処理ユニットとして、ターンテーブル型の光学測定装置を具備した場合の構成と、応用例を以下に説明する。尚、処理のシーケンスについては、実施例1の方法をアレンジすればよいため説明を省略する。また、これまでの実施例と同様のメリット、例えば搬送経路の肥大化の防止や逐次処理の実現等については説明を省略する。
【0233】
図22に、本例の本体処理部の構造を示す。本発明の形態の本体処理部は、コの字状に接続された三本の搬送ライン2210,2220,2230と、複数の検体を搬送ホルダごと円周上に保持して回転移送させるターンテーブル2250と、ターンテーブル上の検体に対して吸光度や散乱光,発光などを測定可能な光学測定装置2260と、コの字状に接続された搬送ラインから容器を取り出すための搬送ライン(接続ライン)2240と、前記接続ラインに搬送ホルダを導入するための分枝機構から構成されている。
【0234】
三本の搬送ライン2210,2220,2230の搬送ラインの上流側から下流側に向かってこの順番に、コの字状に接続されている。これらの搬送ラインは一方通行である。
直線搬送ライン2220には、接続ライン2240と接続するための接続部が設けられている。接続ライン2240は、双方向に動作可能で、接続ライン2240と接続していないほうの末端は、ターンテーブル2250と接続されている。搬送ライン2230の上流側末端は、図11の本体留置部の搬送ライン910と接続され、搬送ライン930の下流側末端は本体留置部の搬送ライン930と接続されている。
【0235】
即ち、ターンテーブルが停止したタイミングで、ターンテーブル上に搬送ホルダが設置されている場合にはターンテーブルから容器を取り出し、ターンテーブルに搬送ホルダが設置されていない場合には、ターンテーブルに新たな容器を装着することができる。好ましくは、接続ライン2240からターンテーブルへ搬送ホルダを押し込む、あるいはターンテーブルから接続ライン2240へ搬送ホルダを引っ張り出すためのアームを有していてもよい。ターンテーブルには、本発明の搬送ホルダを着脱自在に固定でき、かつ、ターンテーブル上に固定された搬送ホルダに対する処理を継続することができる。ターンテーブルには搬送ホルダに対する電力供給手段等が備わっていても良い。ターンテーブルの脇には、容器中に収容された検体からの透過光量や散乱光量,発光強度を測定できる光学測定装置が具備されている。
【0236】
このような構成のメリットを、Reverse Transcription-PCR(非特許文献2)の一形態に応用する場合を一例に説明する。簡単のため、ワンステップReverse Transcription-PCR(RT−PCR;逆転写ポリメラーゼ反応)を用いて、RNAの発現量を調べる場合について説明する。ワンステップRT−PCRは、Reverse Transcription(RT)の工程、即ち、RNAポリメラーゼ等を用いて、complementary DNA(cDNA)を合成(逆転写)する工程と、Polymerase chain reaction(PCR)の工程、即ち前記cDNAをPCR増幅する工程の二段階から構成されている。ここで、ワンステップとは、前処理の段階において、RT工程及び、PCR工程に必要な試薬を全て分注しておき、RT工程及び、PCR工程の途中で一切新たな試薬の分注を必要としない方式のことである。
【0237】
RT−PCRの所要時間は、RT工程が数時間程度、PCR工程が数時間程度と比較的長い。
【0238】
また、RT工程の実施は、特にワンステップ方式の場合には温度調節だけでよく、その間、光学測定の必要性はない。
【0239】
そのため、RTの工程を本体留置部で行い、この工程が終わり次第、PCRの工程を、ターンテーブルに呼び出して行えばよい。
【0240】
尚、RT反応後、あるいはRT反応中に新たな試薬を分注する必要がある場合等には、本体処理部において、ターンテーブルと並列に、分注器等の配置をする等の方法をとればよい。
【0241】
このようは、本発明の装置においては逆転写の工程が終わるまでの間は本体留置部で搬送ホルダに具備された検体処理機能で、RT反応を進行させることができるため、RT反応中には光学測定器を占有する必要がなく、従来法に対して、高価な光学測定装置の占有効率などが大幅に高くなり、装置の原価低減の面において極めて有利となる。
【実施例5】
【0242】
本発明の自動検体処理装置において、オンライン処理ユニットとして、ターンテーブル型の光学測定装置を具備した場合の構成と、別の応用例を説明する。尚、これまでの実施例と同様のメリット、例えば搬送経路の肥大化の防止や逐次処理の実現等については説明を省略する。
【0243】
PCR工程そのものも、時間を要する工程である。ここで、PCRの処理工程(非特許文献2,3)を簡単に要約する。PCRは、DNA溶液にDNAポリメラーゼおよびDNA合成の素材(基質)であるデオキシヌクレオチド三リン酸(dNTP),酵素が働く至適塩濃度環境をつくるためのバッファー溶液,増幅したいDNAの量に応じて発光するプローブ等を加えて生成した反応液に対し、熱変性,アニーリング,伸長の3段階を30〜40サイクル繰り返すことで、DNAを抽出あるいは合成し、自分の望んだ特定のDNA断片(数百から数千塩基対)だけを選択的に増幅させる手法である。
【0244】
熱変性とは、反応液を94℃程度に加熱した状態を30秒から1分間程度保ち、2本鎖DNAを1本鎖に分かれさせる処理を言う。
【0245】
アニーリングとは、熱変性させたあとの反応液を60℃程度にまで急速冷却し、1本鎖DNAとプライマーを結合させる処理を言う。
【0246】
伸長とは、アニーリングの後にプライマーの分離がおきずDNAポリメラーゼの活性に至適な温度帯(60〜72°C程度)まで、再び反応液を加熱し、DNAポリメラーゼによりDNAを合成する処理を言う。
【0247】
つまり反応液に対して3段階の温度を周期的にサイクルする必要がある。本発明の搬送ホルダには、温度調整素子と温度調整シーケンスを記憶可能な制御部が具備されているため、これらの機構によって搬送ホルダ毎に独立して処理を実施するように制御すればPCRが実現可能である。なお、PCR反応専用の装置として用いる場合には、搬送ホルダの攪拌機構は備わっていなくても良い。
【0248】
さて、PCR反応には以下の特徴がある。
(A)PCR反応の増幅には2時間程度を要し、反応時間が極めて長い。
(B)反応曲線がS字型を取り、S字カーブの変曲点付近が重要な情報を持つ。さらにS字カーブは変曲点直前から急に立ち上がり、比較的短い時間で飽和状態に達する。
【0249】
従って、光学測定を行うタイミングは、S字カーブの変曲点付近に限定することができれば少なくとも光学測定装置の占有効率が向上する。
【0250】
また、目的の反応曲線の概形は、異常な事例を除き、よく研究されていて(例えば特許文献9,非特許文献3等)ロジスティック回帰分析で用いられるようなシクモイド関数やダブルシクモイド関数等のS字カーブといわれる類の曲線がPCR反応のモデル曲線として知られている。
【0251】
従って、立ち上がり始める前の反応曲線情報や、飽和した後の反応曲線情報が欠落していても、S字カーブの立ち上がり前後から飽和前後までの反応曲線が測定されていれば、フィッティングによって全体の反応曲線を復元することができる。S字カーブが急激に立ち上がるまでに必要なサイクルは、一般的には熱変性・アニーリング・伸長のサイクルを少なくとも10回程度繰り返す。従って、最初の10サイクル程度は光学測定しなくとも反応曲線を復元することは十分可能である。
【0252】
特に、ゲノムDNA中の特定塩基配列(遺伝子)の発現量を測定する場合には、反応曲線が立ち上がり始める時間はある程度予想できる。ゲノムDNAをルーチンで検査する場合には発現のパターンがある程度分かっているものを検査することが多いためである。従って、反応曲線が立ち上がり始めるまでに要するサイクル数をあらかじめ知っておき、反応曲線が立ち上がり始めると予想されるタイミングで搬送ホルダを光学測定用ターンテーブルに搬送する方法も可能である。
【0253】
本発明の本体留置部は、所望のタイミングに近い条件で、所望の検体のみを取り出すことができるため、光学測定したい検体を本体留置部から取り出してターンテーブルに搬送し、光学測定が完了した検体はターンテーブルからおろしたいタイミングで本体留置部に戻すことができる。
【0254】
上述のようなターンテーブル型のオンライン処理ユニットを備えることによって、有利な点は、一つの光学測定装置あるいは少数の光学測定装置で、複数の検体に対して、定期的に光学測定できることである。とくに、PCRなど一定の時間間隔で光学測定を行う必要がある検体については、このようなオンライン処理ユニットを備えることは有効であるため、以下にPCR反応を用いた遺伝子検査を本実施例における装置で実現する場合の制御方法を説明する。
【0255】
また、反応が飽和状態に達した場合には、光学測定をやめても反応曲線の測定には影響しないため、このような検体を保持した搬送ホルダを光学測定用ターンテーブルから搬出する制御方法も実現可能である。
【0256】
上述のPCR反応を本発明における検体検査システムで実現する場合の処理プロトコールを以下に述べる。
(1)ステップ1:測定項目毎に反応曲線が立ち上がるまでに要する時間をあらかじめ記憶しておく。
(2)ステップ2:反応曲線が立ち上がる時間に達していない検体は、本体留置部でサーモサイクリングを実施して反応を進行させる。
(3)ステップ3:オンライン処理ユニットへの移動時間を考慮し、反応曲線の立ち上がり時間に達した検体を本体留置部から取り出して、オンライン処理ユニットへと搬送し、ターンテーブルに搬送ホルダごと移載する。
(4)ステップ4:反応曲線を復元するにあたり充分な測定点が得られたのち(カーブが立ち上がり始めてから10サイクル程度)、検体をオンライン処理ユニットから搬出して光学測定を中止する。
(5)ステップ5:得られた測定データにモデル曲線をフィッティングすることで、全体の反応曲線を得る。
【0257】
本実施例においては、本体留置部や本体処理部以外の、搬送路でもターンテーブル上でもサーモサイクリングが可能である。もし搬送中にサーモサイクリングが途切れ、検体の温度が一定以下に下がった場合には、非特異な反応が発生し、得られる反応曲線に影響を与えることが良く知られている。
【0258】
なお、ターンテーブルのように少数の光学測定装置で多数の検体の光学測定を行う手段は、PCR反応の反応曲線を取得するような場合、とくに、反応過程のうち一部の領域について全サイクルに渡って反応曲線の測定が望まれるような場合において、あまり有効ではないというふうに考えられるかもしれない。しかし、光学測定データが意味を持つのはサイクルの中の特定のタイミングのみである。この理由は、プローブの発光量が反応液の温度に依存することによる。熱変性過程などのようにDNAが1本鎖に乖離した状態においてはプローブの発光量は、所望の塩基配列の増幅量の指標としては全くあてにならない。従って、ターンテーブルを用いた間欠的な光学測定であっても、有効なタイミングで光学測定データを得るよう制御すれば、必ずしも全サイクルに渡って光学測定することを阻害しない。
【0259】
また、1つの検体のPCR検査をするにあたっては、等価な検体(本来ならば全く同じ結果が出なければならない検体)を並行して複数(一般的には3検体程度)同時にPCR検査するのが通常である。
【0260】
簡単のため、3本の同一検体を並行してPCR検査する場合を一例として考える。これら三本の検体をそれぞれ検体A,検体B,検体Cとする。この場合に本実施例の自動検体処理装置を用いて反応曲線を取得する方法を説明する。
【0261】
(1)ステップ1:検体A,B,Cを投入して本体留置部に搬送する。
(2)ステップ2:いずれの検体も反応曲線が立ち上がるまでに要する時間まで本体留置部でサーモサイクリングを実施する。
(3)ステップ3:検体Aの反応曲線の立ち上がり時間になったら、検体Aをオンライン処理ユニットのターンテーブルに搬送して、光学測定機構での定期的な計測を開始する。
(4)ステップ4:検体Aの反応曲線が実際に立ち上がった後に、検体B,Cも同様にオンライン処理ユニットのターンテーブルに搬送して、光学測定機構での定期的な光学測定を開始する。
(5)ステップ5:検体A,B,C共に、反応曲線を復元するのに充分なサイクル時間、光学測定する(10サイクル程度)。
【0262】
尚、検体Aは反応曲線の立ち上がりを確実に測定するために、予想される立ち上がり時間に対しある程度の裕度を見込んでターンテーブルに投入される。そのため、数サイクル程度は反応曲線が立ち上がらない測定を行うこととなる。これに対し、検体Bおよび検体Cについては、検体Aの立ち上がりを検知した後にターンテーブルに投入されるため、無駄な測定を行わずに済む。
【0263】
検体Bおよび検体Cについては、反応曲線の立ち上がり直後の1〜2サイクル程度は、測定できないことになり、信頼性はAに比べてやや落ちることになる。しかし、検知B・Cの反応曲線を測定する目的は、検体Aの反応曲線の妥当性確認であり、検体Aと一致しているか否かを判定できれば充分であるため、大きな問題にはならない。
【0264】
上記の方法を取ると、反応曲線が立ち上がるまでの初期の10サイクル程度は検体留置室で反応を継続させ、反応曲線が立ち上がってから充分な測定点が得られるまではターンテーブル方式のオンライン処理ユニットで光学測定する。そののちに、反応を打ち切るか、ターンテーブル以外の場所で反応を継続させるため、一つの検体が光学測定機構やターンテーブルを占有する時間を少なくすることができる。自動検体処理装置において単にターンテーブルを組合せたのみでは、検体の個数が多くなった場合に、ターンテーブルの半径が大きくなり、空間的効率が悪くなってしまうが、本実施例の方式を採用することによって、光学測定機構やターンテーブルといった機構を効率的に活用できる。
【実施例6】
【0265】
本実施例では、濃度が未知であるDNA溶液のPCR検査に対しても、効率がよく、信頼性の高い反応曲線を得ることができる。反応曲線から、増幅したいDNAフラグメントの発現量を測定する場合には、一般的に既知濃度のコンペティタと同時にPCR増幅する競合法が用いられる。
【0266】
競合法を行うためには、濃度が既知のDNA(DNAコンペティタ)数種類用意する。
ここでは、希釈系列として、7種類のDNAコンペティタを用意し、濃度の高いほうからA,B,C,D,E,F,Gとする。各DNAコンペティタの濃度は、互いに10倍ずつ希釈する。例えばAはBより10倍濃度が高く、BはCより10倍濃度が高い。本例では7種類のDNAコンペティタを用意したが、DNAコンペティタの個数は本実施例の数に限られず、濃度比も本実施例と異なっていても良い。また、測定対象のDNA溶液の濃度はAよりも薄くGよりも濃いことが推定できているとする。
【0267】
さて、希釈系列A,B,C,D,E,F,Gの各々は、いずれもDNAである。従って、これらを全て同じ容器に加えた場合、いずれもがdNTPを消費するに従って、互いに反応曲線の形状に影響を与え合う。特に、最も濃度の低いDNAコンペティタ;Gについては、AやBと同時にPCR反応をした場合、反応曲線の形状が本来の形状とは大きくずれることが懸念される。当然、本来測定したい、検体由来のDNAの反応曲線も、影響を受けることを免れない。この事実は、PCR反応の定量性に懸念を与える。
【0268】
そこで、本実施例では、同一の検体から抽出されたDNA抽出液をイ,ロ,ハの3つの容器に分注したものを用意する。イには、DNAコンペティタA,B,Cを加え、ロには、DNAコンペティタC,D,Eを加え、ハにはE,F,Gを加える。つまり、希釈系列A,B,C,D,E,F,Gにおいて、濃度の高いほうから3種類ずつイ,ロ,ハの容器に分注し、イとロの間にはCが重複して分注され、ロとハの間にはEが重複して分注されていることとなる。また、イ,ロ,ハの容器それぞれには、検体DNAを増幅検出するのに必要なプライマーやDNAポリメラーゼや、プローブが適切に分注されているものとする。また、プローブの発光色を増幅するDNAごとに変えておくことで、反応曲線の識別ができる。
【0269】
従来のPCR装置においては、反応曲線の測定を行うにあたり、イ,ロ,ハ全ての反応曲線を、全サイクルにわたって光学測定する必要がある。従って光学測定装置を一つの容器が占有する割合が高かった。
【0270】
本例では、以下の手順で、イ,ロ,ハの容器を検体処理システム内に搬送することで、少ない光学測定機構を備えつつ、全ての反応曲線を測定することを可能とする。
(1)ステップ1:検体処理システムに投入された検体イ,ロ,ハを本体留置部へと搬送する。
(2)ステップ2:検体イについては、反応曲線が立ち上がるまでに要する時間をあらかじめ予想しておき、この間は本体留置部でサーモサイクリングを実施する。検体ロ,ハも検体イと同時に本体留置部でサーモサイクリングを開始する。
(3)ステップ3:検体イの反応曲線の立ち上がりが予想されるタイミングで検体イを本体留置部から搬出して本体処理部に投入し、PCR光学測定を開始する(検体搬送路上および本体処理部においてもサーモサイクリングを継続する)。
(4)ステップ4:検体イのコンペティタDNA:Bの反応曲線が立ち上がった直後に、検体ロを本体留置部から搬出して本体処理部に投入し、PCR測定を開始する。
(5)ステップ5:検体イのコンペティタDNA:Cの反応曲線が立ち上がっても、検体DNAの反応曲線が得られない場合には、検体イを本体処理部から排出する。
(6)ステップ6:検体ロのコンペティタDNA:Dの反応曲線が立ち上がった直後に、検体ハを本体留置部から搬出して本体処理部に投入し、PCR測定を開始する。
(7)ステップ7:検体ロのコンペティタDNA:Eの反応曲線が立ち上がっても、検体DNAの反応曲線が得られない場合には、検体イを本体処理部から排出する。
(8)ステップ8:検体ハのコンペティタDNA:Gの反応曲線が立ち上がってから充分時間がたっても検体DNAの反応曲線が得られない場合には、検体ハを本体処理部から排出する。
【0271】
上記の(1)〜(8)のステップを行うことによって希釈系列A,B,C,D,E,F,G全ての反応曲線の立ち上がり時点の波形を、光学測定装置を占有することなく測定できる。検出したいDNAの発現量がAよりも少なく、Gよりも多い場合には、上記の測定方法でもイ,ロ,ハの少なくともいずれかの測定中には反応曲線の変曲点付近の10点程度の重要な測定点の測定ができる。
【0272】
従って、そのような容器、すなわちイ,ロ,ハのいずれかにおいて必要に応じて、全反応過程の反応曲線を、モデル曲線のフィッティングから復元した後、通用のリアルタイムPCR法と同様の手法を用いることで、検体DNAの発現量を特定できる。
【実施例7】
【0273】
例えば、実施例2,3等において、全ての反応が室温で進行する場合等には、搬送ホルダは、検体処理機能を具備する必要がないこともありえる。また、例えば実施例3の5本ラックでは、例えば1本目の検体容器のみ、加熱処理が必要である場合には、検体装着部1510(a)のみに、独立制御可能な加熱機構を装着するという構成も考えられる。さらに、図10のように、多数のセルユニットを装着する場合、セルユニットの1つのみに、搬送ホルダとの通信機能を付与し、このセルユニットのみで搬送ホルダを用いた検体処理を行う構成も考えられる。
【符号の説明】
【0274】
100 容器保持部
110 ホルダ内制御部
120 容器保持部
130 搬送ホルダ外壁部
140 上側のホルダ電極
150 下側のホルダ電極
300(a)−(f) 容器保持部の外壁(平面図において、反時計まわりに(a),(b),…(f)の順に符号を付す。)
310(a)−(f) 温度調節素子(平面図において、反時計まわりに(a),(b),…(f)の順に符号を付す。)
320(a)−(f) ヒートシンク(平面図において、反時計まわりに(a),(b),…(f)の順に符号を付す。)
340 A−A線
400 容器保持部の中心軸
410 制御回路
420 電源部
430 攪拌素子
440 搬送ホルダ底部
450 近接通信手段
500 床
510 搬送ベルト
520(a),(b) 壁
530(a),(b) 絶縁材
540(a),(b),550(a),(b) ガイド電極
560,817,1231 近接通信手段
700 本体処理部
710 本体留置部
720 本体制御部
730 本体投入部
740 本体収納部
750 通信ライン
800,810,820,910,920,930,940,1000,1010,1020,1030,1040,1200(a)−(d),1210,1220,1230,1300(a)−(d),1310,1320,1330,2210,2220,2230 搬送ライン
911 投入ライン
935 収納ライン
801 搬送ライン800の搬送方向
802 搬送ライン800の上流側末端
815 オンライン処理ユニット
816,912,913,931,941,1001,1011,1022,1023,1121(a)−(c),1201(a)−(d),1301(a)−(d),1331 ストッパ
933,934,1021,1120(a)−(c),1302,1303,1311,1312,2221 分枝機構
950 搬送ライン910,920,930,940に囲まれた領域
1110(a)−(c) セルユニット
1510(a)−(e) 検体装着部
1520(a)−(e) 温度調節素子
1530(a)−(e) 攪拌素子
1540 ホルダ内制御部
1610(a)−(e),1810 容器
1620,1820 磁性ビーズ
1630(a)−(e),1830 検体
1700 可撓部
1710 筒
1720 中空部
1721 開口部
1800 蓋(全体を指す)
1900 磁石棒
1910 磁石
2240 接続ライン
2250 ターンテーブル
2260 光学測定装置
【特許請求の範囲】
【請求項1】
容器に入れられた検体を搬送するための搬送ホルダと、
前記搬送ホルダを搬送可能な状態で、装置内に投入する本体投入部と、
投入された搬送ホルダを所定の時間留置させる本体留置部と、
前記搬送ホルダを搬送する搬送ラインと、
当該搬送ライン上の搬送ホルダに収容された検体に対して処理を施す本体処理部と、を備えた自動検体処理装置であって、
前記本体留置部は搬送ホルダを留置させる少なくとも一本の留置ラインを有し、
前記本体留置部と前記本体処理部との間を前記搬送ホルダが行き来するための搬送ラインを備え、
前記留置ラインはループを形成するように構成されていることを特徴とする自動検体処理装置。
【請求項2】
請求項1記載の自動検体処理装置であって、
少なくとも本体制御部を具備し、
前記本体制御部は、前記搬送ホルダ,前記処理ライン,前記留置ライン,前記搬送ライン,前記本体処理部、および前記本体留置部の動作を制御し、
前記本体制御部は、前記搬送ホルダが保持する検体毎に、前記本体留置部で留置させる時間を記憶する留置時間記憶機能と、
前記本体留置部上に留置された搬送ホルダが保持する検体について、経過した留置時間を監視する留置時間監視機能と、を備え、
前記留置時間監視部において留置時間を経過した搬送ホルダを検知した場合には、当該搬送ホルダを前記留置ライン外に搬送することを特徴とする自動検体処理装置。
【請求項3】
請求項2記載の自動検体処理装置であって、
前記留置ラインを複数本備え、
留置される搬送ホルダに架設された検体の留置条件に基づいて、いずれの留置ラインに搬送するかを制御する本体制御部を備えたことを特徴とする自動検体処理装置。
【請求項4】
請求項1記載の自動検体処理装置であって、
少なくとも1本の搬送ラインを備え、
前記搬送ラインには、複数の搬送ホルダを、搬送可能な状態で保持可能で、
前記搬送ホルダは、少なくとも一つの検体を保持可能で、
保持した検体のうち少なくとも一つに対して前記搬送ライン上で処理を実行する処理装置および前記処理装置を制御する制御装置を有することを特徴とする自動検体処理装置。
【請求項5】
請求項4記載の自動検体処理装置であって、
少なくとも前記搬送ホルダおよび前記検体処理装置間で情報をやり取りする通信手段を備え、
前記制御装置は、当該通信手段を介して受信した処理シーケンスに基づき、前記処理装置を制御することを特徴とする自動検体処理装置。
【請求項6】
請求項5記載の自動検体処理装置であって、
前記搬送ホルダに具備される処理装置は、保持する検体を攪拌する手段,保持する検体を加温する手段,保持する検体を冷却する手段,保持する検体に圧力を加える手段,保持する検体に磁場を印加する手段、の少なくともいずれかを備えたことを特徴とする自動検体処理装置。
【請求項7】
請求項6記載の自動検体処理装置であって、
前記処理ライン,前記留置ライン、および前記搬送ラインは前記搬送ホルダに電力を供給するガイド電極を備え、
前記搬送ホルダは前記ガイド電極からの電力を受け取るためのホルダ電極を備え、
前記ガイド電極と前記ホルダ電極とがそれぞれ接触するよう配置されていることを特徴とする自動検体処理装置。
【請求項8】
請求項7記載の自動検体処理装置であって、
前記搬送ライン,前記留置ライン、および前記接続ラインはライン上の搬送ホルダの進行方向に対して左右に二つの側壁を有し、
当該側壁には前記搬送ホルダの進行方向に並行な二列のガイド電極であって、かつ、そのうち一方が接地されているガイド電極が備わり、
前記搬送ホルダは、円筒状の外壁を有し、当該外壁は前記ガイド電極から電力を受け取るためのホルダ電極を円周状に二列備えたことを特徴とする自動検体処理装置。
【請求項9】
請求項7又は8記載の自動検体処理装置であって、
前記搬送ホルダに電力を供給するガイド電極、あるいは、近接通信手段あるいは、無線通信手段の少なくともいずれかを用いて、前記搬送ホルダに当該搬送ホルダが保持する検体に対する処理シーケンスをコマンド送信することを特徴とする自動検体処理装置。
【請求項10】
請求項3記載の自動検体処理装置であって、
予め定めた時間よりも留置時間が長い検体を架設した搬送ホルダを留置する、少なくとも一本以上の長期留置ラインと、
予め定めた時間よりも留置時間が短い検体を架設した搬送ホルダを留置する、少なくとも一本以上の短期留置ラインと、を備えたことを特徴とする自動検体処理装置。
【請求項11】
請求項1−10のいずれかに記載の自動検体処理装置であって、
前記本体処理部に具備される検体処理ユニットが、分注器,開栓器,閉栓器,磁性ビーズ移動手段のいずれかであることを特徴とする自動検体処理装置。
【請求項12】
請求項11記載の自動検体処理装置であって、
前記本体処理部に具備される検体処理ユニットは、磁性ビーズ移動手段を具備し、
当該磁性ビーズ移動手段は、
前記検体容器に蓋をする栓であって当該検体容器を密閉するための可撓部と、
前記可撓部に貫通した底のある筒部から構成される磁性ビーズ捕獲栓を開栓または閉栓する手段と、
先端が磁性を帯びた棒を具備し、
前記棒を前記磁気ビーズ捕獲栓の筒部に挿入することで、磁性ビーズを捕獲することを特徴とする自動検体処理装置。
【請求項13】
容器を架設した搬送ホルダを搬送する搬送装置を備え、
前記搬送装置は、
搬送ホルダを搬送する搬送ラインと、
複数の搬送ホルダを待機させる、少なくとも1本以上の留置ラインと、
前記搬送ラインと前記留置ラインとを接続する接続ラインと、を有する自動検体処理装置の制御方法であって、
前記留置ライン上にある搬送ホルダに架設された検体の留置時間が予め定められた留置時間を経過している場合には、
当該搬送ホルダを前記留置ラインの外へ搬出することを特徴とする制御方法。
【請求項14】
請求項13記載の制御方法であって、
前記留置ライン上にある搬送ホルダに架設された検体の留置時間が予め定められた留置時間を経過している場合であって、当該搬送ホルダよりも下流に留置時間が経過していない他の搬送ホルダが留置されている場合には、
前記搬送ホルダと前記他の搬送ホルダの両方を一旦前記留置ラインの外へ搬出したのち、前記他の搬送ホルダのみを再度前記留置ラインに搬入することを特徴とする制御方法。
【請求項15】
少なくとも一つの容器に入れられた検体を搬送するための搬送ホルダと、
前記搬送ホルダを搬送する搬送ラインと、を具備した自動検体処理装置であって、
前記搬送ホルダは、保持した検体のうち少なくとも一つに対して前記搬送ライン上で処理を実行する処理装置および前記処理装置を制御する制御装置を有することを特徴とする自動検体処理装置。
【請求項16】
請求項15記載の自動検体処理装置であって、
前記搬送ホルダに具備される処理装置は、保持する検体を攪拌する手段,保持する検体を加温する手段,保持する検体を冷却する手段,保持する検体に圧力を加える手段,保持する検体に磁場を印加する手段、の少なくともいずれかを備え、これらのうち少なくとも1つは、搬送ライン上でも独立して制御できることを特徴とする自動検体処理装置。
【請求項17】
請求項16記載の自動検体処理装置であって、
少なくとも前記搬送ホルダおよび前記検体処理装置間で情報をやり取りする通信手段を備え、
前記制御装置は、当該通信手段を介して受信した処理シーケンスに基づき、前記処理装置を制御することを特徴とする自動検体処理装置。
【請求項1】
容器に入れられた検体を搬送するための搬送ホルダと、
前記搬送ホルダを搬送可能な状態で、装置内に投入する本体投入部と、
投入された搬送ホルダを所定の時間留置させる本体留置部と、
前記搬送ホルダを搬送する搬送ラインと、
当該搬送ライン上の搬送ホルダに収容された検体に対して処理を施す本体処理部と、を備えた自動検体処理装置であって、
前記本体留置部は搬送ホルダを留置させる少なくとも一本の留置ラインを有し、
前記本体留置部と前記本体処理部との間を前記搬送ホルダが行き来するための搬送ラインを備え、
前記留置ラインはループを形成するように構成されていることを特徴とする自動検体処理装置。
【請求項2】
請求項1記載の自動検体処理装置であって、
少なくとも本体制御部を具備し、
前記本体制御部は、前記搬送ホルダ,前記処理ライン,前記留置ライン,前記搬送ライン,前記本体処理部、および前記本体留置部の動作を制御し、
前記本体制御部は、前記搬送ホルダが保持する検体毎に、前記本体留置部で留置させる時間を記憶する留置時間記憶機能と、
前記本体留置部上に留置された搬送ホルダが保持する検体について、経過した留置時間を監視する留置時間監視機能と、を備え、
前記留置時間監視部において留置時間を経過した搬送ホルダを検知した場合には、当該搬送ホルダを前記留置ライン外に搬送することを特徴とする自動検体処理装置。
【請求項3】
請求項2記載の自動検体処理装置であって、
前記留置ラインを複数本備え、
留置される搬送ホルダに架設された検体の留置条件に基づいて、いずれの留置ラインに搬送するかを制御する本体制御部を備えたことを特徴とする自動検体処理装置。
【請求項4】
請求項1記載の自動検体処理装置であって、
少なくとも1本の搬送ラインを備え、
前記搬送ラインには、複数の搬送ホルダを、搬送可能な状態で保持可能で、
前記搬送ホルダは、少なくとも一つの検体を保持可能で、
保持した検体のうち少なくとも一つに対して前記搬送ライン上で処理を実行する処理装置および前記処理装置を制御する制御装置を有することを特徴とする自動検体処理装置。
【請求項5】
請求項4記載の自動検体処理装置であって、
少なくとも前記搬送ホルダおよび前記検体処理装置間で情報をやり取りする通信手段を備え、
前記制御装置は、当該通信手段を介して受信した処理シーケンスに基づき、前記処理装置を制御することを特徴とする自動検体処理装置。
【請求項6】
請求項5記載の自動検体処理装置であって、
前記搬送ホルダに具備される処理装置は、保持する検体を攪拌する手段,保持する検体を加温する手段,保持する検体を冷却する手段,保持する検体に圧力を加える手段,保持する検体に磁場を印加する手段、の少なくともいずれかを備えたことを特徴とする自動検体処理装置。
【請求項7】
請求項6記載の自動検体処理装置であって、
前記処理ライン,前記留置ライン、および前記搬送ラインは前記搬送ホルダに電力を供給するガイド電極を備え、
前記搬送ホルダは前記ガイド電極からの電力を受け取るためのホルダ電極を備え、
前記ガイド電極と前記ホルダ電極とがそれぞれ接触するよう配置されていることを特徴とする自動検体処理装置。
【請求項8】
請求項7記載の自動検体処理装置であって、
前記搬送ライン,前記留置ライン、および前記接続ラインはライン上の搬送ホルダの進行方向に対して左右に二つの側壁を有し、
当該側壁には前記搬送ホルダの進行方向に並行な二列のガイド電極であって、かつ、そのうち一方が接地されているガイド電極が備わり、
前記搬送ホルダは、円筒状の外壁を有し、当該外壁は前記ガイド電極から電力を受け取るためのホルダ電極を円周状に二列備えたことを特徴とする自動検体処理装置。
【請求項9】
請求項7又は8記載の自動検体処理装置であって、
前記搬送ホルダに電力を供給するガイド電極、あるいは、近接通信手段あるいは、無線通信手段の少なくともいずれかを用いて、前記搬送ホルダに当該搬送ホルダが保持する検体に対する処理シーケンスをコマンド送信することを特徴とする自動検体処理装置。
【請求項10】
請求項3記載の自動検体処理装置であって、
予め定めた時間よりも留置時間が長い検体を架設した搬送ホルダを留置する、少なくとも一本以上の長期留置ラインと、
予め定めた時間よりも留置時間が短い検体を架設した搬送ホルダを留置する、少なくとも一本以上の短期留置ラインと、を備えたことを特徴とする自動検体処理装置。
【請求項11】
請求項1−10のいずれかに記載の自動検体処理装置であって、
前記本体処理部に具備される検体処理ユニットが、分注器,開栓器,閉栓器,磁性ビーズ移動手段のいずれかであることを特徴とする自動検体処理装置。
【請求項12】
請求項11記載の自動検体処理装置であって、
前記本体処理部に具備される検体処理ユニットは、磁性ビーズ移動手段を具備し、
当該磁性ビーズ移動手段は、
前記検体容器に蓋をする栓であって当該検体容器を密閉するための可撓部と、
前記可撓部に貫通した底のある筒部から構成される磁性ビーズ捕獲栓を開栓または閉栓する手段と、
先端が磁性を帯びた棒を具備し、
前記棒を前記磁気ビーズ捕獲栓の筒部に挿入することで、磁性ビーズを捕獲することを特徴とする自動検体処理装置。
【請求項13】
容器を架設した搬送ホルダを搬送する搬送装置を備え、
前記搬送装置は、
搬送ホルダを搬送する搬送ラインと、
複数の搬送ホルダを待機させる、少なくとも1本以上の留置ラインと、
前記搬送ラインと前記留置ラインとを接続する接続ラインと、を有する自動検体処理装置の制御方法であって、
前記留置ライン上にある搬送ホルダに架設された検体の留置時間が予め定められた留置時間を経過している場合には、
当該搬送ホルダを前記留置ラインの外へ搬出することを特徴とする制御方法。
【請求項14】
請求項13記載の制御方法であって、
前記留置ライン上にある搬送ホルダに架設された検体の留置時間が予め定められた留置時間を経過している場合であって、当該搬送ホルダよりも下流に留置時間が経過していない他の搬送ホルダが留置されている場合には、
前記搬送ホルダと前記他の搬送ホルダの両方を一旦前記留置ラインの外へ搬出したのち、前記他の搬送ホルダのみを再度前記留置ラインに搬入することを特徴とする制御方法。
【請求項15】
少なくとも一つの容器に入れられた検体を搬送するための搬送ホルダと、
前記搬送ホルダを搬送する搬送ラインと、を具備した自動検体処理装置であって、
前記搬送ホルダは、保持した検体のうち少なくとも一つに対して前記搬送ライン上で処理を実行する処理装置および前記処理装置を制御する制御装置を有することを特徴とする自動検体処理装置。
【請求項16】
請求項15記載の自動検体処理装置であって、
前記搬送ホルダに具備される処理装置は、保持する検体を攪拌する手段,保持する検体を加温する手段,保持する検体を冷却する手段,保持する検体に圧力を加える手段,保持する検体に磁場を印加する手段、の少なくともいずれかを備え、これらのうち少なくとも1つは、搬送ライン上でも独立して制御できることを特徴とする自動検体処理装置。
【請求項17】
請求項16記載の自動検体処理装置であって、
少なくとも前記搬送ホルダおよび前記検体処理装置間で情報をやり取りする通信手段を備え、
前記制御装置は、当該通信手段を介して受信した処理シーケンスに基づき、前記処理装置を制御することを特徴とする自動検体処理装置。
【図1】


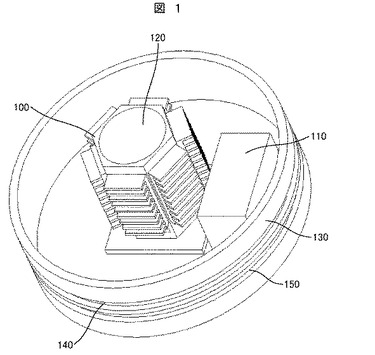
【図2】
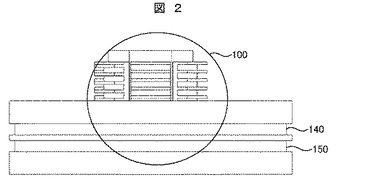
【図3】
【図4】
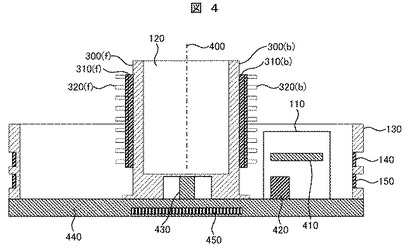
【図5】

【図6】

【図7】
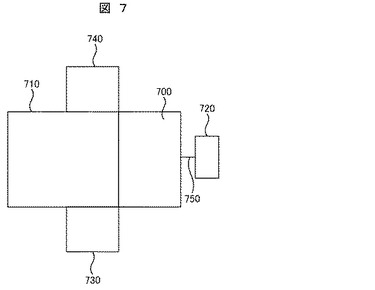
【図8】
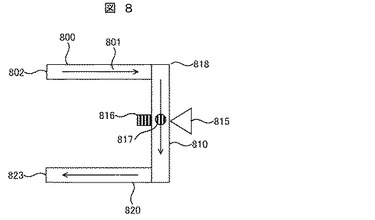
【図9】
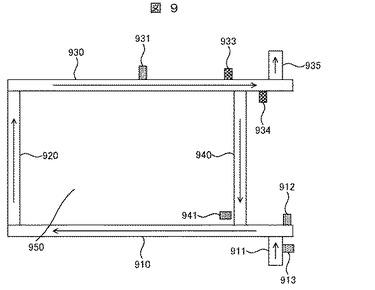
【図10】

【図11】
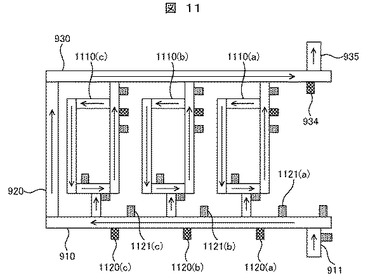
【図12】
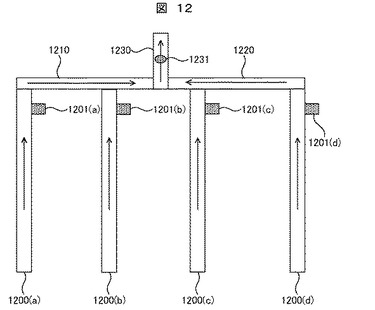
【図13】

【図14】
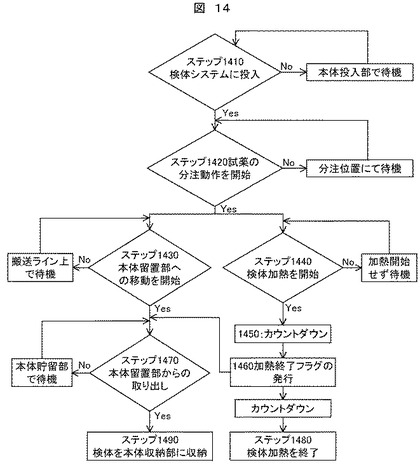
【図15】

【図16】
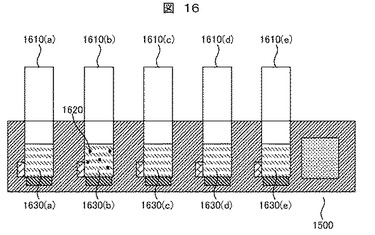
【図17】

【図18】
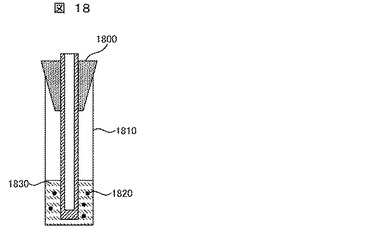
【図19】
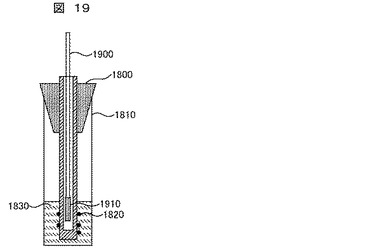
【図20】
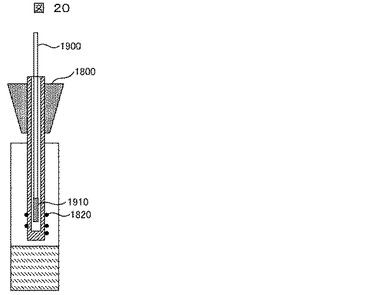
【図21】

【図22】
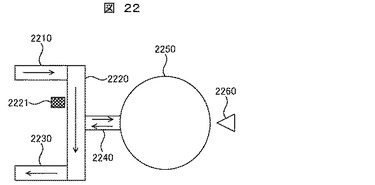
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2012−150067(P2012−150067A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−10361(P2011−10361)
【出願日】平成23年1月21日(2011.1.21)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月21日(2011.1.21)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]