
身体内部領域にアクセスする手持ち式機器
【課題】カニューレおよびトロカールの身体内部への配置を可能にし、カニューレを適所に残す一方で、トロカールの後の引き出しを可能にする器具を提供する。
【解決手段】本発明の器具は、組織を貫通するようにされた遠位端34及び第1のハンドル22を含む近位端32を有する第1の機器20と、第1の機器20を通すようにされた内部管腔44を含む第2の機器40であって、第1のハンドル22に適合するようにされた第2のハンドル42を有する近位端52を有し、海綿質の骨の領域へのアクセスを提供するための複合機器10を形成し、使用者が第1の機器20を内部管腔44から取り外すことを可能にする第2の機器40と、骨充填物質を注入するためのシリンジ136と、第1の機器40が取り外された第2の機器40の内部管腔44を通るようにされた注入ノズル140と、を備える。
【解決手段】本発明の器具は、組織を貫通するようにされた遠位端34及び第1のハンドル22を含む近位端32を有する第1の機器20と、第1の機器20を通すようにされた内部管腔44を含む第2の機器40であって、第1のハンドル22に適合するようにされた第2のハンドル42を有する近位端52を有し、海綿質の骨の領域へのアクセスを提供するための複合機器10を形成し、使用者が第1の機器20を内部管腔44から取り外すことを可能にする第2の機器40と、骨充填物質を注入するためのシリンジ136と、第1の機器40が取り外された第2の機器40の内部管腔44を通るようにされた注入ノズル140と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
(発明の分野)
本発明は、一般に、手持ち式器具および機器、ならびに身体の内部領域にアクセスするために、組織を通過するこれらの機器を展開する手順に関する。
【背景技術】
【0002】
(発明の背景)
身体の内部領域へのアクセスを得るために医師が使用する手持ち式手術機器の多くの異なる型およびスタイルが存在する。これらの機器は、押す力、ねじり力、または両方の組合せの適用によって組織を貫通することが意図される。
【0003】
しばしば、単一の手術手順は、医師が異なる手術機器を使用することを必要とし、各々は、異なる形状、大きさ、および機能を有する。しばしば、この手順は、医師が軟組織および硬組織の両方においてこの機器を展開させて、手順の診断目的および治療目的に合わせる必要がある。医師は、しばしば、組織を通して、特に密組織または硬組織(例えば、骨)を通して機器を進行させるために、増強した機械的利点を必要とする。
【発明の開示】
【発明が解決しようとする課題】
【0004】
所定の手順において異なる機器を使用する共通の必要性は、しばしば増強された機械的利点を用いて、軟組織および硬組織の両方を通してこれらの異なる機器の各々を正確にかつ信用のおけるように展開する必要性と合わせて、医師の既に困難な仕事を複雑にする。異なる目的のために異なる様式で異なる機器を取り扱う必要性は、医師を混乱させ得、そして無駄な努力に導き得、このことは、手順の全時間を延ばし得る。
【課題を解決するための手段】
【0005】
(発明の要旨)
本発明は、カニューレおよびトロカールの両方の身体の内部領域への初期配置を可能にし、そしてカニューレを適所に残す一方で、トロカールの後の引き出しを可能にするハンドル設計を有する手術機器を提供する。本発明は、手術手順の間のいくつかの機器についての必要性を排除し、そして内部アクセスプロトコルを単純化する。同時に、手術機器のハンドルは、増加した機械的利点によって、医師による選択された機器へのねじれた充填および長手方向への充填の信頼のおける送達を可能にする。
【0006】
本発明の1つの局面は、第1のハンドルを有する第1の機能的機器および第2のハンドルを有する第2の機能的機器を備える器具を提供する。この第1の機能的機器は、第2の機能的機器と係合し、複合機器を形成する。この第1のハンドルは、第2のハンドルと嵌合し、複合機器のための複合ハンドルを形成する。
【0007】
本発明の特徴および利点は、以下の説明および図面、ならびに添付の特許請求の範囲に記載される。
【0008】
本発明は、その意図または本質的な特徴から逸脱することなくいくつかの形態において、具体化され得る。本発明の範囲は、以下の具体的な説明においてではなく、添付の特許請求の範囲において規定される。それにより、特許請求の範囲の等価性の意義および範囲内にある全ての実施形態は、特許請求の範囲によって包含されることが意図される。
【0009】
より特定すれば、本発明は以下の項目に関し得る。
(1)器具であって、以下:第1のハンドルを備える第1の機能的機器、第2のハンドルを備える第2の機能的機器を備え、該第1の機能的機器は、該第2の機能的機器に係合して複合機器を形成し、そして該第1の機能的機器が該第2の機器と係合する場合に、該第1のハンドルは該第2のハンドルと嵌合して複合ハンドルを形成する、器具。
(2)項目(1)に記載の器具であって、ここで、前記第1の機能的機器がトロカール機器である、器具。
(3)項目(1)に記載の器具であって、ここで、前記第2の機能的機器がカニューレ機器である、器具。
(4)項目(1)に記載の器具であって、ここで、前記複合ハンドルが、使用の際に、長手方向の力を前記複合機器に伝達するように適応される、器具。
(5)項目(1)に記載の器具であって、ここで、前記複合ハンドルが、使用の際に、回転力を前記複合機器に伝達するように適応される、器具。
(6)項目(1)に記載の器具であって、ここで、前記複合ハンドルが、使用の際に、長手方向の力および回転力の両方を前記複合機器に伝達するように適応される、器具。
(7)項目(1)に記載の器具であって、ここで、前記複合ハンドルが、使用の際に、打撃力を受けるように適応される、器具。
(8)項目(1)に記載の器具であって、ここで、前記複合ハンドルが、打撃力が適用される場合に変形に耐え得る材料で構築される、器具。
(9)項目(1)に記載の器具であって、ここで、
前記第2の機能的機器がカニューレであり、そして前記第1の機能的機器が、該カニューレを通過するために寸法決めされたトロカールである、器具。
(10)項目(9)に記載の器具であって、ここで、前記トロカールが、前記カニューレよりも長い、器具。
(11)項目(1)に記載の器具であって、ここで、前記第1のハンドルおよび第2のハンドルのうちの少なくとも1つが、前記第1の機能的機器および前記第2の機能的機器のうちの少なくとも1つが熱消毒されたか否かを示す材料で構成される、器具。
(12)項目(11)に記載の器具であって、ここで、前記材料が、熱に暴露される場合に分解する、器具。
(13)項目(12)に記載の器具であって、ここで、前記変形は、前記第1のハンドルが、前記第2のハンドルと結合することを妨げる、器具。
(14)項目(1)に記載の器具であって、ここで、前記第1のハンドルおよび第2のハンドルのうちの少なくとも1つが、前記第1の機能的機器および前記第2の機能的機器のうちの少なくとも1つが放射および殺菌性薬品のうちの少なくとも1つによって滅菌されたか否かを示す材料で構成される、器具。
(15)項目(14)に記載の器具であって、ここで、前記材料が、放射および殺菌性薬品のうちの少なくとも1つに暴露される場合に色が変化する、器具。
(16)請求項1に記載の器具を用いて、骨にアクセスする方法。
【0010】
本発明はまた、器具に関し、この器具は、以下:第1のハンドルを備える第1の機能的機器であって、該第1のハンドルが、手の少なくとも2つの指によって同時に握るための第1の指で握る面および第2の指で握る面を含む、第1の機能的器具、第2のハンドルを備える第2の機能的機器であって、該第2のハンドルが、手の少なくとも2つの指によって握るための第3の指で握る面および第4の指で握る面を含む、第2の機能的器具を備え、該第1の機能的機器は、該第2の機能的機器に係合して複合機器を形成し、そして該第1の機能的機器が該第2の機器と係合する場合に、該第1のハンドルは該第2のハンドルと嵌合して手の4つの指によって握るための指で握る複合面を形成するように一緒に適合する、該第1、第2、第3、および第4の、指で握る面を含む複合ハンドルを形成する。
【0011】
前記第1の機能的機器はトロカール機器であり得る。前記第2の機能的機器はカニューレ機器であり得る。
【0012】
前記複合ハンドルは、使用の際に、長手方向の力を前記複合機器に伝達するように適応され得る。
【0013】
前記複合ハンドルは、使用の際に、回転力を前記複合機器に伝達するように適応され得る。
【0014】
前記複合ハンドルは、使用の際に、長手方向の力および回転力の両方を前記複合機器に伝達するように適応され得る。
【0015】
前記複合ハンドルは、使用の際に、打撃力を受けるように適応され得る。
【0016】
前記複合ハンドルは、打撃力が適用される場合に変形に耐え得る材料で構築され得る。
【0017】
前記第2の機能的機器はカニューレであり、そして前記第1の機能的機器は、該カニューレを通過するために寸法決めされたトロカールであり得る。
【0018】
前記トロカールは、前記カニューレよりも長くても良い。
【0019】
前記第1の指で握る面および第2の指で握る面は、手の人差し指と小指とによって同時に握るために第1の距離離れて側方に間隔を置かれ、
前記第3の指で握る面および第4の指で握る面は、手の2つの隣接する指によって同時に握るために第1の距離より小さい第2の距離離れて側方に間隔を置かれ、そして前記複合ハンドルが、手の人差し指によって該第1の指で握る面、手の小指によって該第2の指で握る面、手の薬指によって該第3の指で握る面、および手の中指によって該第4の指で握る面を同時に握るために隣接し、かつほぼ同一平面にある関係で静止する第1、第2、第3および第4の指で握る面を備え得る。
【0020】
本発明はまた、器具に関し、この器具は:第1のハンドルを備える第1の機能的機器であって、該第1のハンドルが、2つの隣接するフィンガーレシーバーを含む第1の指で握る面を含む、第1の機能的器具、第2のハンドルを備える第2の機能的機器であって、該第2のハンドルが、2つの離れて置かれたフィンガーレシーバーを含む第2の指で握る面を含む、第2の機能的器具を備え、該第1の機能的機器は、該第2の機能的機器に係合して複合機器を形成し、そして該第1の機能的機器が該第2の機器と係合し複合ハンドルを形成するとき、該第1のハンドルが該第2のハンドルと嵌合し、それによって、該第1の指で握る面の2つの隣接するフィンガーレシーバーが、該第2の指で握る面の2つの離れて置かれたフィンガーレシーバーの間で適合し、該第1の指で握る面および第2の指で握る面を含む指で握る複合面を形成する、隣接するフィンガーレシーバーのアレイを提供する。
【発明の効果】
【0021】
第1の機器と第2の機器とを、第1の機器上の第1の指で握る面および第2の指で握る面の、第2の機器上の第3の指で握る面と第4の指で握る面との適合によって形成される複合面で連結するハンドル設計を有するので、第1の機器と第2の機器の両者を身体の内部領域に配置することを可能にし、そしていずれかの機器を身体内に残しながら、他方の機器を引き出すことを可能にする。
【発明を実施するための最良の形態】
【0022】
(好ましい実施形態の詳細な説明)
本明細書は、組織を貫通するための新規な機器を記載する。本明細書はまた、組織を貫通するための新規な機器とともに拡張可能な本体を使用して、骨を処置するためのシステムおよび方法を記載する。
【0023】
骨を処置するための拡張可能な本体の使用は、一般に、米国特許第4,969,888号および同第5,108,404号に開示され、これらは、本明細書中で参考として援用される。この点における改善は、米国特許出願番号08/188,224(1994年1月26日出願);米国特許出願番号08/485,394(1995年6月7日出願);および米国特許出願番号08/659,678(1996年6月5日出願)に開示され、これらの各々は、参考として援用される。
【0024】
新規な機器、システムおよび方法が、椎体の処置に関して記載される。しかし、このように記載されるハンドル構成、機器、システムおよび方法は、椎骨へのそれらの適用に限定されないことが理解されるべきである。これらのシステムおよび方法は、多様な骨の型の処置に適用可能である。さらに、ハンドル構成は、トロカールおよびカニューレ以外の機器とともに使用され得る。
【0025】
(I.機器)
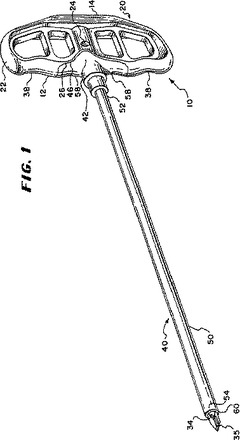
図1は、組織を貫通するための複合機器10を示す。この複合機器10は、第1の機能的機器20および第2の機能的機器40、ならびに第1のハンドル22および第2のハンドル42を備える複合ハンドル12を含む。この複合ハンドル12は、複合機器10を操作する際に医師を補助するが、医師はまた、好ましくは、第1のハンドル22を使用して、使用の間に、第2の機器40を独立して操作するために、第1の機器20または第2のハンドル42を独立して操作し得る。
【0026】
機器20および40の数および型は、変化し得る。図1は、代表的な2つの機器20および40を示し、各々は、異なる大きさおよび機能を有する。好ましい実施形態において、第1の機能的機器20はトロカール機器であり、そして第2の機能的機器40は、カニューレ機器である。
【0027】
(A.トロカール機器)
図1〜4を参照して、第1の機器20は、組織を貫通するためのトロカール機器として機能する。トロカール30は、近位端32および遠位端34を有する。遠位端34は、貫通表面35を提供するようにテーパ状である。使用において、貫通表面35は、第1のハンドル22または複合ハンドル12において、医師によって付与される押す力および/またはねじり力に応答して、軟組織および/または骨を貫通することが意図される。
【0028】
第1のハンドル22は、トロカールの近位端32でトロカール30に連結される。図6Cから最もよく理解されるように、トロカール30の近位端32は、T字型に形成され得、第1のハンドル22が、T字型の端部のまわりに成形される。この配置は、ハンドル22とトロカール30との間の結合の機械的強度を有意に増加させ、そして有意な長手方向の力およびねじり力が、結合を壊すことなくハンドル20からトロカール30に伝達されることを可能にする。あるいは、T字型の端部を伴ってまたは伴わず、トロカール30の近位端32に刻み目が入れられて(図6Cの刻み目を入れられた領域33によって示される)、トロカール30とハンドル22との間の結合の機械的強度を増加させ得るか、または種々の結合接着剤が使用され得、種々の結果が得られる。
【0029】
第1のハンドル22は、好ましくは、表示窓24、整列リッジレシーバ26、ハンドルボアレシーバ28およびハンドルキー36を備え、これらの使用は、以下に記載される。
【0030】
代替の実施形態において(図18を参照のこと)、トロカール30は、内部管腔21を備え、これは、ハンドル22およびトロカール30の本体を通過する。内部管腔21は、スタイレットおよび/または従来の脊椎ニードルアセンブリ23の通過に順応して、軟組織を通って標的骨処置部位に、それ自体または第2の機器40と入れ子状態になることによって(図18に示すように)、第1の機器20の展開をガイドする。
【0031】
(B.カニューレ機器)
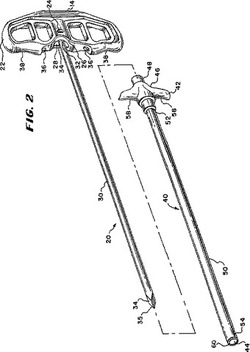
第2の機器40は、カニューレ機器またはガイドさやとして機能し、そしてカニューレ50を含む。第2の機器40のカニューレ50は、好ましくは、第1の機器20のトロカール30よりその直径がいくらか大きく、そしてトロカール30よりの長くはない。図1および2から最もよく理解されるように、第2の機器40は、内部管腔44を備え、これは、機器を介して、その遠位端54からその近位端52に延びる。内部管腔44は、トロカール30を受容するように寸法決めされる。内部管腔44の大きさは、好ましくは、第2の機器40が、第1の機器20に対してスライドおよび/または回転すること、およびその逆を可能にし、これは、以下により詳細に記載される。
【0032】
第2の機器40の遠位端54は、端部表面60を提供する。使用において、第2の機器40の端部表面60は、好ましくは、低プロフィール表面を提供し、これは、複合ハンドル12または第2のハンドル42において付与された押す力および/またはねじり力に応答して第1の機器20を取り囲む軟組織を貫通し得る。
【0033】
近位端52は、第2のハンドル42と連結され得る。図6Dにおいて最もよく理解されるように、カニューレ50の近位端52は、好ましくは、フレア状でかつ切欠きのある端部「A」および模様のついた表面「B」を組み入れ、そのまわりに、第2のハンドル42が成形される。フレア状でかつ切欠きのある端部「A」および模様のついた表面「B」は、カニューレ50と第2のハンドル42との間の結合の機械的強度を増加させるように作用し、有意な長手方向の力およびねじり力が、結合を壊すことなく、第2のハンドル42とカニューレ50との間に伝達されることを可能にする。しかし、トロカール30と同様に、代替の結合方法(例えば、カニューレ50の刻み目付けおよび/または種々の接着剤の使用など)が使用され得、種々の結果が得られる。
【0034】
カニューレ50の近位端52における内部管腔44からの延びて、第2のハンドル42は、好ましくは、カニューレ50と共周囲である、ハンドルボア48を好ましくは備える。第2のハンドル42は、整列リッジ46およびハンドル溝56を備え、これらの使用は、以下に記載される。
【0035】
(C.ドリルビット機器)
図11に示されるように、任意の第3の機能的機器70が、ドリルビットとして機能する。ドリルビット機器70(遠位端72および近位端74を有する)は、代表的に、トロカール30より多少長く、そして一般に、トロカール30と同じ物理的寸法を有する。トロカール30と同様に、使用において、ドリルビット機器70は、第2の機器40の内部管腔44内でのスライド運動および回転運動のために適合されることが意図される。
【0036】
ドリルビット機器70の遠位端72は、好ましくは切断縁76を備える。使用において、切断縁76は、ドリルビット機器70の近位端74において付与される回転充填力および長手方向の充填力に応答して硬組織を貫通することが意図される。
【0037】
ドリルビット機器70は、既知の構成であり得、そして広範に変化し得る。好ましくは、ドリルビット機器70の直径は、第二の機器40の内部管腔44より小さく、そしてその長さは、カニューレ50より長く、その結果、ドリルビット機器70は、カニューレ50が患者に導入される場合、カニューレ50よりも深い組織にアクセスし得る。
【0038】
(II.機器ハンドル)
第1のハンドル22および第2のハンドル42は、快適に手に適合するように、望ましくは連結して第1のハンドル22と第2のハンドル42との間の相対回転に耐える複合ハンドル12を形成するように、および望ましくは、この機器が再利用されたかおよび/または再滅菌されたか否かを示すように設計される。
【0039】
(A.手への適合性)
図1〜4に示されるように、複合ハンドル12は、図3に示されるような通常の人の手に快適にかつ安全に掴まれるような形状である。好ましくは、複合ハンドル12の輪郭は丸くされて、快適なグリップを提供し、かつ手術用手袋が裂けるのを最少にする。
【0040】
図3に示されるように、好ましい実施形態において、第1のハンドル22は、望ましくは2つのフィンガーレシーバ38を備え、医師の人差し指と小指を受容することが意図される。
【0041】
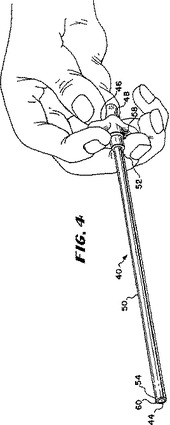
図4に示されるように、好ましい実施形態において、第2のハンドル42は、望ましくは2つのフィンガーレシーバ58を備え、医師の中指および薬指を受容することが意図される。
【0042】
第1のハンドル22および第2のハンドル42の形状およびサイズは、当然変化する。図1に示される実施形態において、複合ハンドル12、および特に第1のハンドル22は、衝撃プレート14を備え、これは、掌にわたって快適に適合するように伸長する。この衝撃プレート14はまた、衝撃を受けるように構成される(後述される)。
【0043】
(B.連結形状)
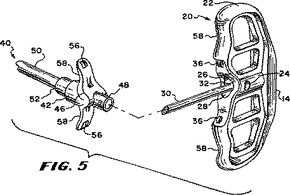
衝撃力、押力および/または捻る力を複合ハンドル12に加えた場合に適切に相互作用するために、第1のハンドル22は、望ましくは第2のハンドル42に対して回転しない。ここで図5、6Aおよび6Bを参照すると、相対回転を避けるために、第1のハンドル22は、好ましくは第2のハンドル42の整列リッジ46を受容するための整列リッジレシーバ26を備える。リッジとして記載されそして描かれているが、第1のハンドル22と第2のハンドル42との間の整列機構相互作用は、弓形形状以外の任意の数の形状(例えば、ブロック(blook)形状または星形)を含み得る。
【0044】
使用の際に、第1の機器20のトロカール30は、第2の機器40のカニューレ50を通ってスライドする場合、第1のハンドル22および第2のハンドル44は、一緒に嵌合して複合ハンドル12を形成する。整列リッジレシーバ26によって回転に耐える整列リッジ46に加えて、第1のハンドル22は、第2のハンドル42のハンドル溝56と連結するハンドルキー36を備え得る。
【0045】
ハンドル溝56がハンドルキー36と整列せず、それにより整列リッジ46が整列リッジレシーバ26と整列しない場合、第2のハンドル42のハンドルボア48は、望ましくは第1のハンドル22のハンドルボアレシーバ28内に完全には挿入しない。この整列において、表示窓24は、トロカール30を示し、これは、好ましくはこの表示窓24を超えて延びる。またこの整列において、第1のハンドル22は、望ましくは第2のハンドル42と独立して回転し得る。
【0046】
しかし、図6Bに示されるように、ハンドル溝56がハンドルキー36と整列し、そしてそれにより整列リッジ46が整列リッジレシーバ26と整列する場合、第2のハンドル42のハンドルボア48は、第1のハンドル22のハンドルボアレシーバ28内に完全に挿入され得る。
【0047】
この操作整列において、表示窓24は、ハンドルボア48を表示する。好ましくは、ハンドルボア48は、トロカール30とは異なる色であり、その結果可視化が単純になる。またこの整列において、第1のハンドル22は、望ましくは第2のハンドル42と独立して回転しない。この整列において、複合ハンドル10は、4本の指(2本ずつの指がそれぞれ第1のハンドル22および第2のハンドル42上にある)に適応するようなサイズおよび形状にされる。
【0048】
当然、第1のハンドル22および第2のハンドル42が、非平行配向で係合するように設計され得、その結果第1のハンドル22および第2のハンドル42は、適切に係合されて複合ハンドル10を形成した場合に平行ではないことが理解されるべきである。例えば、第1のハンドル22は、星型または六角形の開口部を組み込み得、その開口に、対応する星型または六角形の第2のハンドル42が複数の配向で係合し得る。
【0049】
使用の際に、種々の力は、第1の機器20と第2の機器40との間の相対移動に抵抗する。図3に示されるように、手が複合ハンドル10を掴む場合、指によって加えられた上向きの力は、掌により与えられる下向きの力と結合し、第1の機器20と第2の機器40とを一緒に加圧する。前述したように、適切に構成された場合、これらの機器の相対回転も、望ましくは同様に妨げられる。
【0050】
(C.ハンドル材料)
(1.構造完全性)
第1のハンドル22および第2のハンドル42について選択される材料は、望ましくは、手動操作および手動の衝撃から予測される力に耐えるのに十分な構造の完全性を提供する。第1のハンドル22および第2のハンドル42は、有意に変形せずに衝撃力、押力および捻り力に耐えるのに十分な強度で、成形または鋳造された剛性材料から作製される。
【0051】
ハンドル構成の別の好ましい特徴は、第1のハンドル22および第2のハンドル42が粗くされるかまたは他の方法で手触りが残るようにされて安定したグリップ表面を提供し得ることである。
【0052】
(2.再利用)
1回のみの使用を奨励し、かつ再利用および/または再滅菌を防ぐために、新しい手工具と再利用されたかおよび/または再滅菌された手工具との間に差異をつけることが好ましい。
【0053】
最初の使用の間の、本明細書中に記載される機器および構造のいずれかに対する衝撃および手動の圧力の行使は、この機器および/または構造を構成する材料(単数または複数)へのストレスを生じる。最初の使用の間の操作負荷により生じた材料のストレスは、この構造の成形された形態を有意に変更し得、この構造の未来の性能を予測不能にする。
【0054】
例えば、1回のみの使用の間の海綿質へのトロカールおよびカニューレの前進の間に、周囲の皮質および海綿質との接触を生じる。この接触は、この構造を損傷し得、弱い局在化領域を生じ、これはしばしば視覚検出を逃れ得る。弱い局在化領域の存在は、その後の使用の間に予期せず構造欠陥を引き起こし得る。このような接触はまた、カニューレの末端表面の平坦化および/もしくは巻き上がり、またはトロカールの穿通表面の鈍化を引き起こし得る。
【0055】
さらに、1回のみの使用の間の血液および組織への曝露は、カニューレまたはハンドル構造上またはカニューレまたはハンドル構造内に生物学的成分を閉じ込め得る。クリーニングおよび続く滅菌にもかかわらず、閉じ込められた生物学的成分の存在は、許容できない発熱反応をもたらし得る。
【0056】
結果として、最初の使用後に、この構造は、確立された性能および滅菌仕様を満たさないかもしれない。1回のみの使用の間に引き起こされる材料ストレスおよび損傷の効果は、再滅菌の後の発熱反応の可能性と併せて、組織および骨において展開される機器およびハンドルについての1回のみの使用を理にかなって正当化し、そして推奨する。
【0057】
複数回使用により引き起こされる潜在的な不利な結果(疾患の伝染、または材料のストレスおよび不安定性または減少した性能もしくは予測不可能な性能を含む)から患者を保護するために、種々の材料を使用して、この手工具の再使用および/または再滅菌を表示し得、かつおそらく防止し得る。
【0058】
例えば、熱分解性材料を使用して、変形により、手工具がオートクレーブ処理されたか否かを表示し得る。さらに、化学的感受性染料(例えば、Tempilから市販されるインク)は、複合ハンドル12に塗布されて、変色により、手工具が、滅菌デバイスについてのANSI/AAMI/ISO11135:1994の必要条件の記載されるように、(例えば、エチレンオキシド(ETO)の使用により)化学的に滅菌されたか否かを表示し得る。さらに、他の滅菌方法(例えば、放射滅菌)の存在下で変色するかおよび/または物理的構成を変化する種々の材料は、手工具に組み込まれて滅菌を表示し得る。
【0059】
十分な構造の剛性を提供し、なお機器が滅菌に一般的な熱に曝露されたか否かを表示する1つの材料は、LUSTRANTM材料であり、これは、Bayerから市販される。図17Aおよび17Bに示されるように、この材料がハンドル構成に使用される場合、この材料は典型的には熱滅菌の間に変形し、望ましくはハンドル溝56がハンドルキー36と整列するのを防止し、それにより整列リッジ46が整列リッジレシーバ26と整列するのを防止する。さらに、変形に続いて、第2のハンドル42のハンドルボア48は、望ましくは第1のハンドル22のハンドルボアレシーバ28内に完全には挿入され得ない。
【0060】
(III.システムの例示的使用)
以下は、図9〜15に示されるように骨の処置の状況において、カテーテル構成要素130、診断または治療要素132、シリンジ136およびタンピング機器142と組み合わせた複合機器10、機器20、40、および70の使用を記載する。これは、これらの部材がこの目的のために有利に使用され得るからである。さらに、複合機器10が、骨の処置における使用に限定されず、診断または治療目的を実行するために組織に接触することを意図される機器にも限定されないことが理解されるべきである。第1のハンドル22および第2のハンドル42を伴った複合ハンドル12の構成は、種々の他のハンドヘルド機器に付随して使用され得る。
【0061】
複合機器10、ハンドル12、22、および42、ならびに機器20、40、64および70は、ここでヒト椎骨の処置に関して記載される。しかし、これらの使用がヒト椎骨に限定されないことが理解される。ハンドル18は、種々のヒトまたは動物の骨の型の処置においてハンドヘルド機器と共に使用され得る。
【0062】
(A.椎骨解剖)
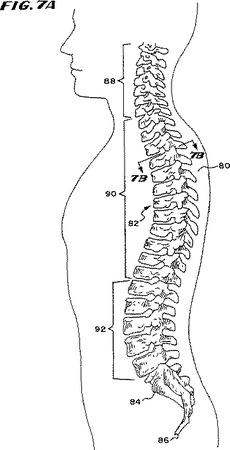
このシステムの1つの使用は、椎体の処置である。図7Aが示すように、脊柱80は、多数の独特の形状の骨(椎骨82、仙骨84および尾骨(coccyx)86(尾骨(tailbone)とも呼ばれる)と呼ばれる)を含む。脊柱80を構成する椎骨82の数は、動物の種に依存する。ヒトでは(図7Aが示す)、24個の椎骨82が存在し、これは7個の頸椎88、12個の胸椎90、および5個の腰椎92を含む。
【0063】
側面から見た場合、図7Aが示すように、脊柱80は、S字型曲線を形成する。この曲線は、重い頭部を支持するために役立つ。4本足の動物では、脊椎の曲線はより単純である。
【0064】
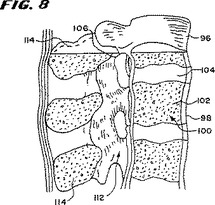
図7A、7Bおよび8が示すように、各椎骨82は、椎体96を含み、これは、椎骨82の前方(すなわち、前面または胸部)側面上に延びる。図7A、7Bおよび8が示すように、椎体96は、楕円盤形状である。図7Bおよび8が示すように、椎体96は、緻密皮質骨98から形成される外部を含む。皮質骨98は、網状格子構造または海綿質102(髄様骨または海綿質(trabecularbone)とも呼ばれる)の内部容積100を取り囲む。椎間円板104と呼ばれる「クッション」は、隣接する椎体96の間に位置する。
【0065】
開口部(椎孔106と呼ばれる)は、各椎骨82の後部(すなわち、背部)側面上に位置する。脊髄神経節109は、椎孔106を通過する。脊髄108は、脊柱管107を通過する。
【0066】
椎弓110は、脊柱管107を取り囲む。椎弓110の茎112は、椎体96に隣接する。棘突起114は、椎弓110の後部から伸長し、左右の横突起116も同様に伸長する。
【0067】
(B.外科手術技術)
代表的な手順において、患者は、手術台に横たわり、一方で医師は、複合機器10を、患者の背部の軟質組織(図9においてSと示される)に導入する。医師の選択に依存して、患者は台上にうつ伏せになり得るか、または横向きになるかもしくは斜めに傾くかのいずれかであり得る。さらに、この手順は、開腹手順または前方内視鏡手順により行われ得る。
【0068】
(1.海綿質へのアクセス)
放射学的モニタリングまたはCTモニタリング下で、医師は図9に示されるように、複合機器10を軟質組織Sを通して下に、標的椎骨82へ前進させる。医師は、代表的には局部麻酔薬(例えば、リドカイン)を標的領域に投与する。いくつかの場合、医師は、他の麻酔形態(例えば、全身麻酔)を選択し得る。
【0069】
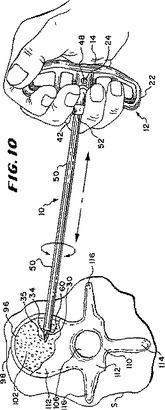
図10に示されるように、医師は、第1機器20のトロカール30および第2機器40のカニューレ50が、標的椎骨82の皮質骨98および海綿質102を穿通するように、複合機器10を方向付ける。所望の場合、医師は、複合ハンドル10を、長手方向の力をハンドル10に加えながら捻る。これに応じて、トロカール30の穿通表面35およびカニューレ50の末端表面60は回転し、そして軟質組織および/または骨を貫通する。
【0070】
好ましくは、トロカール30の遠位端34およびカニューレ50の末端表面60の穿通の深さは、皮質骨98の第1の壁を通って海綿質102に入る。しかし、皮質骨98の第1の壁を通って海綿質102に入る穿通が、複合機器10の手動の前進によって到達されない場合、医師は、手術用ハンマー(示さず)のような鈍器を用いて衝撃プレート14に穏やかに衝撃を与えることにより、また他の方法では、適切なさらなる長手方向の力を複合ハンドル12に加えて、穿通を続けて、トロカール30の遠位端34およびカニューレ50の末端表面60を前進させ得る。
【0071】
所望される場合、医師は、椎体82に最初にアクセスするために脊髄ニードルアセンブリおよびスタイレットを使用し得、次いでアクセス手順を完了するために、図18に示される代替的実施形態を利用する。図18に示される実施形態は、医師がスタイレット23を標的化した椎体82へと配置し、次いで、複合機器10を、軟部組織を通って標的化された椎体82へとスタイレット23に沿って導くことを可能にし、これは、複合機器10が軟部組織を通って椎体82へと進む場合に、トロカールの内腔21を通過する。一旦、このトロカール30が十分に皮質骨を貫通すると、医師は、この脊髄針アセンブリ23を取り除き得る。
【0072】
皮質骨98を貫通した後、所望の場合、医師は椎体96の海綿質102を通る複合機器10の前進を続け得、これによって海綿質102を通る通路を形成する。好ましくは、この通路は、椎体の95%以下を横切って伸長する。次いで、医師は、カニューレ50が皮質骨98内に残り、そして/または海綿質102への通路の一部のみ伸長するように、機器10を取り除き得る。次いで、ロカール30は、カニューレ50から取り除かれ得、カニューレ50を通って椎体82の内部に形成された通路へのアクセスが可能になる。
【0073】
あるいは、皮質骨98の貫通後、医師は、カニューレ50からトロカール30を取り除き、そしてドリルビット70を使用して海綿質102への通路を形成するために選択し得る。このような場合、医師は、第2の機器40を適切な場所に保持し、そして第1の機器20を手動で取り除くことによって、第1の機能的機器20を除去する。
【0074】
次に、図11に示されるように、医師は、カニューレ50を通ってドリルビット70を前進させる。X線制御下で(または、別の外部可視化システムを使用して)、医師は適切な捻れおよび長手方向の力をドリルビット70に加え、ドリルビット70のカッティングエッジ76を回転および前進させて、骨組織を通り海綿質102への完全な通路を開ける。この穿孔された通路は、好ましくは、椎体96の95%未満を横切って伸長する。
【0075】
この手順におけるこの時点で、海綿質102へのアクセスが達成され、そしてカニューレ50の横断面60は、カニューレ機器50のみを適切な場所に残して、内部容積100へと伸長する。
【0076】
(2.骨の処置)
図12に示されるように、今度は、医師は、カテーテル部品130を身につけ得る。この医師は、カテーテル部品130によって運ばれる診断要素または治療要素132を、ハンドルボア48およびカニューレ50を通って、椎体96の内部容積100へと前進させ得る。
【0077】
カテーテル部品130の遠位の診断要素または治療要素132は、種々の機能を行うように構成され得る。例えば、この要素132は、海綿質のサンプルを得るためまたは骨髄を収集するために、生検機器を備え得る。あるいは、この遠位要素132は、薬剤などを海綿質へと導入するためのスタイレットであり得る。あるいは(図13に示されるように)、この遠位要素132は、米国特許第4,969,888号、同第5,108,404号、および同第5,827,289号(これらは、本明細書中に参考として援用される)に開示される様式で、海綿質102を圧縮し、そして椎体96中にキャビティ134を形成するための伸長体を備え得る。海綿質102の圧縮の際に、この遠位要素132はまた、形成されたキャビティに材料を注入するためのノズル140を備え得る。
【0078】
キャビティ134の形成の際に、医師はシリンジ136および注入ノズル140を身につける。図14が示すように、このノズル140は、カニューレ50を通過するようにサイズ決めされており、これによってキャビティ134へと通過する。このノズル140は、糸を通したコネクタ186によってシリンジ136に接続される。このノズル140は、強固な金属材料(例えば、ステンレス鋼)から形成され得る。
【0079】
図14が示すように、医師は、シリンジ136を所望される容量の充填物質138で満たす。この医師は、満たしたシリンジ136にノズル140を取り付ける。医師は、カニューレ50の遠位端54を超えた選択された距離にノズル140を挿入し、ノズル140上のマーキング166によって導いてキャビティに入れる。次に、医師はシリンジ136を操作して、ノズル140を通して材料138をキャビティ134へと放出する。
【0080】
望ましいことに、医師は、カニューレ50の遠位端54から最も遠いキャビティ134の領域に、材料138を最初に導入する。この医師は、続いてカニューレ50の遠位端54に向かってノズル140を引き付けて、材料138の注入の間にキャビティ54の残りを満たす。
【0081】
この段階で、ノズル140はシリンジ104から糸をはずされる。図15が示すように、医師は次に、ノズル140を通してタンピング機器142を前進させる。タンピング機器142の遠位端は、ノズル140中の材料138の残余容量に接触する。タンピング機器142の前進は、残余物質138をノズル140から移し、これを強制的にキャビティ134に入れる。ノズル140におけるタンピング機器142の前進によって推進される材料138のキャビティ134への流れは、過度の圧力を適用することなく、キャビティ134の内部の材料138を均一に分散し、そして圧縮するために役立つ。
【0082】
図16に示されるように、シリンジ136にノズル140を取り付けることの代替として、医師は、第2の機器40のハンドルボア48にシリンジ136を直接取り付け得る。図16における代替の実施形態において示されるように、シリンジ136は、糸137または他のファスナー(例えば、スナップシット(snap−sit)ファスナーまたはルアーロックファスナー)を有し得る。この糸137は、ハンドルボア48に含まれるボアスレッド49と適合する。次に、医師はこのシリンジ136を操作して、ハンドルボア48およびカニューレ50を通って、材料138をキャビティ134に直接放出する。この処置において、医師は、シリンジ136を取り外し、そしてハンドルボア48およびカニューレ50を通してタンピング機器142を前進させて、残余材料138をカニューレ50から移し、これを強制的にキャビティ134に入れる。
【0083】
ノズル140を備えるかまたは備えないシリンジ136およびタンピング機器142の使用は、キャビティ134が材料138で満たされる場合に、医師が正確な制御を行うことを可能にする。医師は、遭遇した特定の局所的生理学的条件に従って、送達の容量および速度を直ちに調整し得る。タンピング機器142によって均一に適用される低い圧力の適用(すなわち、望ましくはカニューレの遠位端で360psi以下、より望ましくはカニューレの遠位端で190psi以下、そして最も望ましくはカニューレの遠位端で100psi以下)は、医師が、充填容量、粘性、および流路条件に迅速に応答することを可能にする。材料138の過充填およびキャビティ部分の外側への漏出の機会は、これによって有意に減少される。
【0084】
医師が、材料138のキャビティ部分の内部への十分な分散を満足させる場合、医師は、カニューレ50およびハンドルボア48からタンピング機器142を取り除く。この医師は、好ましくは、材料138との接触をきれいに断ち切るために、最初にタンピング機器142を捻る。
【0085】
当然のことながら、この手順は、1つの椎体に複数回複数の配向でアクセスし、そして処置するために繰り返され得、複数のキャビティを生成し、これは相互接続していてもしていなくてもよい。上記の様式でキャビティが満たされ、そして詰められた後に、この機器は取り除かれ、そして切開部位は縫合して閉じられ得る。骨の処置手順は完結する。
【0086】
(C.提案される材料)
望ましいことに、材料138は、身体のさらなる骨折を防ぐために、椎体内での十分な支持を提供する。負荷に耐える椎体の能力は、これによって改善される。この材料はまた、椎体の回復を促進し得る。
【0087】
選択される材料138は、ボーンセメント、あるいは従来の方法で得た自家移植または異系移植の骨移植片組織(例えば、ペースト形態(Dick,「AUse of the Acetabular Reamer to Harvest Autogenic Bone GraftMaterial:A Simple Method for ProducingBone Paste」,Archivesof Orthopaedicand Traumatic Surgery(1986),105:235−238を参照のこと)、またはペレット形態(Bhanら「A Percutaneous Bone Grafting for Nonunionand Delayed Union of Fractures of the TibialShaft」,@International Orthopaedics(SICOT)(1993)17:310−312)を参照のこと))であり得る。あるいは、この骨移植片組織は、SpineTechから市販のBoneGraft Harvesterを使用して入手され得る。漏斗を使用して、このペースト状またはペレット状の移植片組織材料を、カニューレ50に充填する。次いで、タンピング機器142は、上記の様式でカニューレ50へと前進され、ペースト状またはペレット状の移植片組織材料をカニューレ50からキャビティ134に移す。
【0088】
この選択される材料138はまた、サンゴから収穫した顆粒状骨材料(例えば、Interporeから入手可能なProOsteonTM炭酸カルシウム顆粒)を含み得る。この顆粒は、漏斗を使用してカニューレ50に充填され、そしてタンピング機器142を使用してキャビティへと進められる。
【0089】
この選択される材料138はまた、グリセロール中に懸濁した鉱物除去された骨マトリックス(例えば、Osteotechから入手可能なGraftonTM異系移植片材料)、またはNovianから入手可能なSRSTMリン酸カルシウムセメントを含み得る。これらの粘性材料は、以前に記載されたボーンセメントと同様に、シリンジ136に充填され、そして直接かまたはノズル140(これは、カニューレ50を通してキャビティ134へと挿入される)を使用してキャビティへと注入され得る。タンピング機器142は、残余材料を上記のようにカニューレ50からキャビティ134に移すために使用される。
【0090】
選択される材料138はまた、シート形態(例えば、ウシの骨由来の炭酸カルシウム粉末およびコラーゲンから作製されるCollagraftTM材料)であり得る。このシートは、管状に巻き取られ得、そして手によってカニューレ50へと充填され得る。次いで、タンピング機器142は、カニューレ50を通って前進され、この材料を押し、そしてキャビティ134内に圧縮する。
【0091】
本発明の特徴は、上記の特許請求の範囲において記載される。
(要約)
第1の機能的機器(20)が第2の機能的機器(40)に結合する場合に、第1の機能的機器(20)および第2の機能的機器(40)を備える複合機器(10)が提供される。第1のハンドル(22)が第2のハンドル(42)と結合する場合に、第1のハンドル(22)および第2のハンドル(42)を備える、複合機器のための複合ハンドル(12)が提供される。このハンドル(12)は、第1および第2の機器(20、40)の間の相対的回転に抵抗する間に、増大する機械的利点を用いて、医師による複合機器へのねじれおよび長手方向の負荷の確実な伝達を可能にする。この機器は、滅菌感応性であり、滅菌後の物理的外見が変化する。
【産業上の利用可能性】
【0092】
身体の内部領域に接近するために医師が使用する新規な手持ち式手術機器が提供される。
【図面の簡単な説明】
【0093】
【図1】図1は、第2の機能的機器と係合して、第1および第2の機器のハンドルが形成する複合ハンドルを有する複合器具を形成する第1の機能的機器の斜視図である。
【図2】図2は、第2の機器から分離した第1の機器の斜視図である。
【図3】図3は、図1に示される器具の複合ハンドルと係合する手の斜視図である。
【図4】図4は、第1の機能的機器から分離した時の第2の機能的機器のハンドルと係合した手の斜視図である。
【図5】図5は、分離されたときの、第1および第2の機能的機器のハンドルの拡大斜視図であり、複合器具が形成された場合に機能的機器の間の相対的な回転に抵抗する連結システムを示す。
【図6A】図6Aは、分離した場合の、図5に示されるハンドルの拡大側面図である。
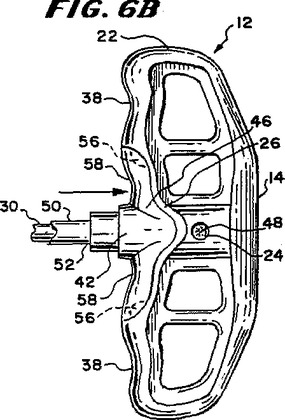
【図6B】図6Bは、一緒に嵌合されて複合ハンドルを形成する場合の、図5に示される拡大側面図である。
【図6C】図6Cは、図6Bの複合ハンドルとともに使用するのに適したトロカールの側面図である。
【図6D】図6Dは、図6Bの複合ハンドルとともに使用するのに適したカニューレの側面図である。
【図7A】図7Aは、ヒト脊柱の横から見た図である。
【図7B】図7Bは、脊柱の一部であり、一部分がとられ、そして断面である、ヒト椎体の冠状図である。
【図8】図8は、脊柱の一部であり、一部分がとられ、そして断面である、いくつかの椎体の横から見た図である。
【図9】図9は、複合ハンドルを使用して、ねじり力および/または押す力を供給することによって、組織を介する複合機器の進行を示す斜視図である。
【図10】図10は、複合ハンドルを使用して軸方向の力および/またはねじり力を供給することによって、椎体における複合機器の展開を示す頂面図である。
【図11】図11は、椎体の頂面図であり、カニューレ機器を介するドリルビットの展開を示し、このカニューレ機器が、図9に示される複合器具の一部を形成する。
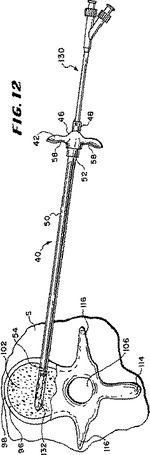
【図12】図12は、図9に示される複合器具の一部を形成するカニューレ機器を通して収縮した状態の拡張可能な構造物の展開を示す椎体の頂面図である。
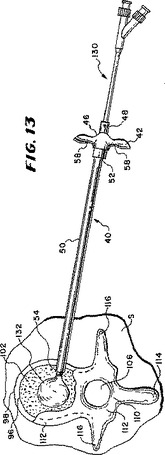
【図13】図13は、図12に示される構造物が拡張して、癌性の骨に広がり、そしてキャビティを形成した後の椎体の頂面図である。
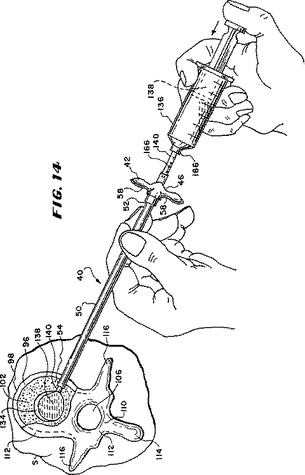
【図14】図14は、図13に示されるキャビティへの進入のために、カニューレ機器に材料を注入するための使用における、シリンジおよび取り付けられたノズルの頂面図である。
【図15】図15は、カニューレ機器から図13に示されるキャビティへ材料を移動および分布させるためのカニューレ機器におけるタンピング機器の進行を示す側面図である。
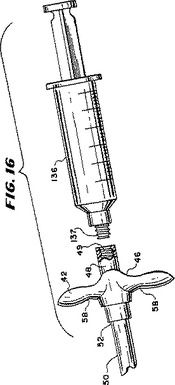
【図16】カニューレ機器を介して骨に材料を運ぶ目)、図9に示される複合ツールの一部を形成するカニューレ機器に取り付けられたシリンジの側面図である。
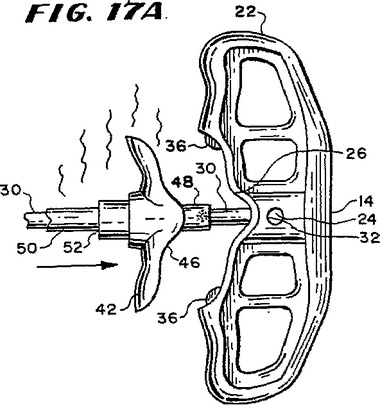
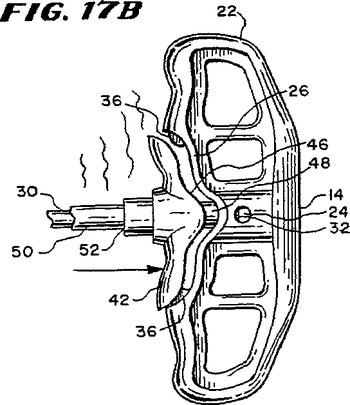
【図17A】図17Aは、複合ハンドルの引き続く形成を防止するために、熱消毒の結果として各々のハンドルで生じる材料の変形を示す斜視図である。
【図17B】図17Bは、複合ハンドルの引き続く形成を防止するために、熱消毒の結果として各々のハンドルで生じる材料の変形を示す斜視図である。
【図18】図18は、図1に示される複合器具に類似する複合器具の代替の実施形態の斜視図であり、展開を補助する脊椎ニードルアセンブリの通過に順応するための内部管腔を有する。
【符号の説明】
【0094】
10 複合機器
20 第1の機器
22 第1のハンドル
30 トロカール
40 第2の機器
42 第2のハンドル
50 カニューレ
【技術分野】
【0001】
(発明の分野)
本発明は、一般に、手持ち式器具および機器、ならびに身体の内部領域にアクセスするために、組織を通過するこれらの機器を展開する手順に関する。
【背景技術】
【0002】
(発明の背景)
身体の内部領域へのアクセスを得るために医師が使用する手持ち式手術機器の多くの異なる型およびスタイルが存在する。これらの機器は、押す力、ねじり力、または両方の組合せの適用によって組織を貫通することが意図される。
【0003】
しばしば、単一の手術手順は、医師が異なる手術機器を使用することを必要とし、各々は、異なる形状、大きさ、および機能を有する。しばしば、この手順は、医師が軟組織および硬組織の両方においてこの機器を展開させて、手順の診断目的および治療目的に合わせる必要がある。医師は、しばしば、組織を通して、特に密組織または硬組織(例えば、骨)を通して機器を進行させるために、増強した機械的利点を必要とする。
【発明の開示】
【発明が解決しようとする課題】
【0004】
所定の手順において異なる機器を使用する共通の必要性は、しばしば増強された機械的利点を用いて、軟組織および硬組織の両方を通してこれらの異なる機器の各々を正確にかつ信用のおけるように展開する必要性と合わせて、医師の既に困難な仕事を複雑にする。異なる目的のために異なる様式で異なる機器を取り扱う必要性は、医師を混乱させ得、そして無駄な努力に導き得、このことは、手順の全時間を延ばし得る。
【課題を解決するための手段】
【0005】
(発明の要旨)
本発明は、カニューレおよびトロカールの両方の身体の内部領域への初期配置を可能にし、そしてカニューレを適所に残す一方で、トロカールの後の引き出しを可能にするハンドル設計を有する手術機器を提供する。本発明は、手術手順の間のいくつかの機器についての必要性を排除し、そして内部アクセスプロトコルを単純化する。同時に、手術機器のハンドルは、増加した機械的利点によって、医師による選択された機器へのねじれた充填および長手方向への充填の信頼のおける送達を可能にする。
【0006】
本発明の1つの局面は、第1のハンドルを有する第1の機能的機器および第2のハンドルを有する第2の機能的機器を備える器具を提供する。この第1の機能的機器は、第2の機能的機器と係合し、複合機器を形成する。この第1のハンドルは、第2のハンドルと嵌合し、複合機器のための複合ハンドルを形成する。
【0007】
本発明の特徴および利点は、以下の説明および図面、ならびに添付の特許請求の範囲に記載される。
【0008】
本発明は、その意図または本質的な特徴から逸脱することなくいくつかの形態において、具体化され得る。本発明の範囲は、以下の具体的な説明においてではなく、添付の特許請求の範囲において規定される。それにより、特許請求の範囲の等価性の意義および範囲内にある全ての実施形態は、特許請求の範囲によって包含されることが意図される。
【0009】
より特定すれば、本発明は以下の項目に関し得る。
(1)器具であって、以下:第1のハンドルを備える第1の機能的機器、第2のハンドルを備える第2の機能的機器を備え、該第1の機能的機器は、該第2の機能的機器に係合して複合機器を形成し、そして該第1の機能的機器が該第2の機器と係合する場合に、該第1のハンドルは該第2のハンドルと嵌合して複合ハンドルを形成する、器具。
(2)項目(1)に記載の器具であって、ここで、前記第1の機能的機器がトロカール機器である、器具。
(3)項目(1)に記載の器具であって、ここで、前記第2の機能的機器がカニューレ機器である、器具。
(4)項目(1)に記載の器具であって、ここで、前記複合ハンドルが、使用の際に、長手方向の力を前記複合機器に伝達するように適応される、器具。
(5)項目(1)に記載の器具であって、ここで、前記複合ハンドルが、使用の際に、回転力を前記複合機器に伝達するように適応される、器具。
(6)項目(1)に記載の器具であって、ここで、前記複合ハンドルが、使用の際に、長手方向の力および回転力の両方を前記複合機器に伝達するように適応される、器具。
(7)項目(1)に記載の器具であって、ここで、前記複合ハンドルが、使用の際に、打撃力を受けるように適応される、器具。
(8)項目(1)に記載の器具であって、ここで、前記複合ハンドルが、打撃力が適用される場合に変形に耐え得る材料で構築される、器具。
(9)項目(1)に記載の器具であって、ここで、
前記第2の機能的機器がカニューレであり、そして前記第1の機能的機器が、該カニューレを通過するために寸法決めされたトロカールである、器具。
(10)項目(9)に記載の器具であって、ここで、前記トロカールが、前記カニューレよりも長い、器具。
(11)項目(1)に記載の器具であって、ここで、前記第1のハンドルおよび第2のハンドルのうちの少なくとも1つが、前記第1の機能的機器および前記第2の機能的機器のうちの少なくとも1つが熱消毒されたか否かを示す材料で構成される、器具。
(12)項目(11)に記載の器具であって、ここで、前記材料が、熱に暴露される場合に分解する、器具。
(13)項目(12)に記載の器具であって、ここで、前記変形は、前記第1のハンドルが、前記第2のハンドルと結合することを妨げる、器具。
(14)項目(1)に記載の器具であって、ここで、前記第1のハンドルおよび第2のハンドルのうちの少なくとも1つが、前記第1の機能的機器および前記第2の機能的機器のうちの少なくとも1つが放射および殺菌性薬品のうちの少なくとも1つによって滅菌されたか否かを示す材料で構成される、器具。
(15)項目(14)に記載の器具であって、ここで、前記材料が、放射および殺菌性薬品のうちの少なくとも1つに暴露される場合に色が変化する、器具。
(16)請求項1に記載の器具を用いて、骨にアクセスする方法。
【0010】
本発明はまた、器具に関し、この器具は、以下:第1のハンドルを備える第1の機能的機器であって、該第1のハンドルが、手の少なくとも2つの指によって同時に握るための第1の指で握る面および第2の指で握る面を含む、第1の機能的器具、第2のハンドルを備える第2の機能的機器であって、該第2のハンドルが、手の少なくとも2つの指によって握るための第3の指で握る面および第4の指で握る面を含む、第2の機能的器具を備え、該第1の機能的機器は、該第2の機能的機器に係合して複合機器を形成し、そして該第1の機能的機器が該第2の機器と係合する場合に、該第1のハンドルは該第2のハンドルと嵌合して手の4つの指によって握るための指で握る複合面を形成するように一緒に適合する、該第1、第2、第3、および第4の、指で握る面を含む複合ハンドルを形成する。
【0011】
前記第1の機能的機器はトロカール機器であり得る。前記第2の機能的機器はカニューレ機器であり得る。
【0012】
前記複合ハンドルは、使用の際に、長手方向の力を前記複合機器に伝達するように適応され得る。
【0013】
前記複合ハンドルは、使用の際に、回転力を前記複合機器に伝達するように適応され得る。
【0014】
前記複合ハンドルは、使用の際に、長手方向の力および回転力の両方を前記複合機器に伝達するように適応され得る。
【0015】
前記複合ハンドルは、使用の際に、打撃力を受けるように適応され得る。
【0016】
前記複合ハンドルは、打撃力が適用される場合に変形に耐え得る材料で構築され得る。
【0017】
前記第2の機能的機器はカニューレであり、そして前記第1の機能的機器は、該カニューレを通過するために寸法決めされたトロカールであり得る。
【0018】
前記トロカールは、前記カニューレよりも長くても良い。
【0019】
前記第1の指で握る面および第2の指で握る面は、手の人差し指と小指とによって同時に握るために第1の距離離れて側方に間隔を置かれ、
前記第3の指で握る面および第4の指で握る面は、手の2つの隣接する指によって同時に握るために第1の距離より小さい第2の距離離れて側方に間隔を置かれ、そして前記複合ハンドルが、手の人差し指によって該第1の指で握る面、手の小指によって該第2の指で握る面、手の薬指によって該第3の指で握る面、および手の中指によって該第4の指で握る面を同時に握るために隣接し、かつほぼ同一平面にある関係で静止する第1、第2、第3および第4の指で握る面を備え得る。
【0020】
本発明はまた、器具に関し、この器具は:第1のハンドルを備える第1の機能的機器であって、該第1のハンドルが、2つの隣接するフィンガーレシーバーを含む第1の指で握る面を含む、第1の機能的器具、第2のハンドルを備える第2の機能的機器であって、該第2のハンドルが、2つの離れて置かれたフィンガーレシーバーを含む第2の指で握る面を含む、第2の機能的器具を備え、該第1の機能的機器は、該第2の機能的機器に係合して複合機器を形成し、そして該第1の機能的機器が該第2の機器と係合し複合ハンドルを形成するとき、該第1のハンドルが該第2のハンドルと嵌合し、それによって、該第1の指で握る面の2つの隣接するフィンガーレシーバーが、該第2の指で握る面の2つの離れて置かれたフィンガーレシーバーの間で適合し、該第1の指で握る面および第2の指で握る面を含む指で握る複合面を形成する、隣接するフィンガーレシーバーのアレイを提供する。
【発明の効果】
【0021】
第1の機器と第2の機器とを、第1の機器上の第1の指で握る面および第2の指で握る面の、第2の機器上の第3の指で握る面と第4の指で握る面との適合によって形成される複合面で連結するハンドル設計を有するので、第1の機器と第2の機器の両者を身体の内部領域に配置することを可能にし、そしていずれかの機器を身体内に残しながら、他方の機器を引き出すことを可能にする。
【発明を実施するための最良の形態】
【0022】
(好ましい実施形態の詳細な説明)
本明細書は、組織を貫通するための新規な機器を記載する。本明細書はまた、組織を貫通するための新規な機器とともに拡張可能な本体を使用して、骨を処置するためのシステムおよび方法を記載する。
【0023】
骨を処置するための拡張可能な本体の使用は、一般に、米国特許第4,969,888号および同第5,108,404号に開示され、これらは、本明細書中で参考として援用される。この点における改善は、米国特許出願番号08/188,224(1994年1月26日出願);米国特許出願番号08/485,394(1995年6月7日出願);および米国特許出願番号08/659,678(1996年6月5日出願)に開示され、これらの各々は、参考として援用される。
【0024】
新規な機器、システムおよび方法が、椎体の処置に関して記載される。しかし、このように記載されるハンドル構成、機器、システムおよび方法は、椎骨へのそれらの適用に限定されないことが理解されるべきである。これらのシステムおよび方法は、多様な骨の型の処置に適用可能である。さらに、ハンドル構成は、トロカールおよびカニューレ以外の機器とともに使用され得る。
【0025】
(I.機器)
図1は、組織を貫通するための複合機器10を示す。この複合機器10は、第1の機能的機器20および第2の機能的機器40、ならびに第1のハンドル22および第2のハンドル42を備える複合ハンドル12を含む。この複合ハンドル12は、複合機器10を操作する際に医師を補助するが、医師はまた、好ましくは、第1のハンドル22を使用して、使用の間に、第2の機器40を独立して操作するために、第1の機器20または第2のハンドル42を独立して操作し得る。
【0026】
機器20および40の数および型は、変化し得る。図1は、代表的な2つの機器20および40を示し、各々は、異なる大きさおよび機能を有する。好ましい実施形態において、第1の機能的機器20はトロカール機器であり、そして第2の機能的機器40は、カニューレ機器である。
【0027】
(A.トロカール機器)
図1〜4を参照して、第1の機器20は、組織を貫通するためのトロカール機器として機能する。トロカール30は、近位端32および遠位端34を有する。遠位端34は、貫通表面35を提供するようにテーパ状である。使用において、貫通表面35は、第1のハンドル22または複合ハンドル12において、医師によって付与される押す力および/またはねじり力に応答して、軟組織および/または骨を貫通することが意図される。
【0028】
第1のハンドル22は、トロカールの近位端32でトロカール30に連結される。図6Cから最もよく理解されるように、トロカール30の近位端32は、T字型に形成され得、第1のハンドル22が、T字型の端部のまわりに成形される。この配置は、ハンドル22とトロカール30との間の結合の機械的強度を有意に増加させ、そして有意な長手方向の力およびねじり力が、結合を壊すことなくハンドル20からトロカール30に伝達されることを可能にする。あるいは、T字型の端部を伴ってまたは伴わず、トロカール30の近位端32に刻み目が入れられて(図6Cの刻み目を入れられた領域33によって示される)、トロカール30とハンドル22との間の結合の機械的強度を増加させ得るか、または種々の結合接着剤が使用され得、種々の結果が得られる。
【0029】
第1のハンドル22は、好ましくは、表示窓24、整列リッジレシーバ26、ハンドルボアレシーバ28およびハンドルキー36を備え、これらの使用は、以下に記載される。
【0030】
代替の実施形態において(図18を参照のこと)、トロカール30は、内部管腔21を備え、これは、ハンドル22およびトロカール30の本体を通過する。内部管腔21は、スタイレットおよび/または従来の脊椎ニードルアセンブリ23の通過に順応して、軟組織を通って標的骨処置部位に、それ自体または第2の機器40と入れ子状態になることによって(図18に示すように)、第1の機器20の展開をガイドする。
【0031】
(B.カニューレ機器)
第2の機器40は、カニューレ機器またはガイドさやとして機能し、そしてカニューレ50を含む。第2の機器40のカニューレ50は、好ましくは、第1の機器20のトロカール30よりその直径がいくらか大きく、そしてトロカール30よりの長くはない。図1および2から最もよく理解されるように、第2の機器40は、内部管腔44を備え、これは、機器を介して、その遠位端54からその近位端52に延びる。内部管腔44は、トロカール30を受容するように寸法決めされる。内部管腔44の大きさは、好ましくは、第2の機器40が、第1の機器20に対してスライドおよび/または回転すること、およびその逆を可能にし、これは、以下により詳細に記載される。
【0032】
第2の機器40の遠位端54は、端部表面60を提供する。使用において、第2の機器40の端部表面60は、好ましくは、低プロフィール表面を提供し、これは、複合ハンドル12または第2のハンドル42において付与された押す力および/またはねじり力に応答して第1の機器20を取り囲む軟組織を貫通し得る。
【0033】
近位端52は、第2のハンドル42と連結され得る。図6Dにおいて最もよく理解されるように、カニューレ50の近位端52は、好ましくは、フレア状でかつ切欠きのある端部「A」および模様のついた表面「B」を組み入れ、そのまわりに、第2のハンドル42が成形される。フレア状でかつ切欠きのある端部「A」および模様のついた表面「B」は、カニューレ50と第2のハンドル42との間の結合の機械的強度を増加させるように作用し、有意な長手方向の力およびねじり力が、結合を壊すことなく、第2のハンドル42とカニューレ50との間に伝達されることを可能にする。しかし、トロカール30と同様に、代替の結合方法(例えば、カニューレ50の刻み目付けおよび/または種々の接着剤の使用など)が使用され得、種々の結果が得られる。
【0034】
カニューレ50の近位端52における内部管腔44からの延びて、第2のハンドル42は、好ましくは、カニューレ50と共周囲である、ハンドルボア48を好ましくは備える。第2のハンドル42は、整列リッジ46およびハンドル溝56を備え、これらの使用は、以下に記載される。
【0035】
(C.ドリルビット機器)
図11に示されるように、任意の第3の機能的機器70が、ドリルビットとして機能する。ドリルビット機器70(遠位端72および近位端74を有する)は、代表的に、トロカール30より多少長く、そして一般に、トロカール30と同じ物理的寸法を有する。トロカール30と同様に、使用において、ドリルビット機器70は、第2の機器40の内部管腔44内でのスライド運動および回転運動のために適合されることが意図される。
【0036】
ドリルビット機器70の遠位端72は、好ましくは切断縁76を備える。使用において、切断縁76は、ドリルビット機器70の近位端74において付与される回転充填力および長手方向の充填力に応答して硬組織を貫通することが意図される。
【0037】
ドリルビット機器70は、既知の構成であり得、そして広範に変化し得る。好ましくは、ドリルビット機器70の直径は、第二の機器40の内部管腔44より小さく、そしてその長さは、カニューレ50より長く、その結果、ドリルビット機器70は、カニューレ50が患者に導入される場合、カニューレ50よりも深い組織にアクセスし得る。
【0038】
(II.機器ハンドル)
第1のハンドル22および第2のハンドル42は、快適に手に適合するように、望ましくは連結して第1のハンドル22と第2のハンドル42との間の相対回転に耐える複合ハンドル12を形成するように、および望ましくは、この機器が再利用されたかおよび/または再滅菌されたか否かを示すように設計される。
【0039】
(A.手への適合性)
図1〜4に示されるように、複合ハンドル12は、図3に示されるような通常の人の手に快適にかつ安全に掴まれるような形状である。好ましくは、複合ハンドル12の輪郭は丸くされて、快適なグリップを提供し、かつ手術用手袋が裂けるのを最少にする。
【0040】
図3に示されるように、好ましい実施形態において、第1のハンドル22は、望ましくは2つのフィンガーレシーバ38を備え、医師の人差し指と小指を受容することが意図される。
【0041】
図4に示されるように、好ましい実施形態において、第2のハンドル42は、望ましくは2つのフィンガーレシーバ58を備え、医師の中指および薬指を受容することが意図される。
【0042】
第1のハンドル22および第2のハンドル42の形状およびサイズは、当然変化する。図1に示される実施形態において、複合ハンドル12、および特に第1のハンドル22は、衝撃プレート14を備え、これは、掌にわたって快適に適合するように伸長する。この衝撃プレート14はまた、衝撃を受けるように構成される(後述される)。
【0043】
(B.連結形状)
衝撃力、押力および/または捻る力を複合ハンドル12に加えた場合に適切に相互作用するために、第1のハンドル22は、望ましくは第2のハンドル42に対して回転しない。ここで図5、6Aおよび6Bを参照すると、相対回転を避けるために、第1のハンドル22は、好ましくは第2のハンドル42の整列リッジ46を受容するための整列リッジレシーバ26を備える。リッジとして記載されそして描かれているが、第1のハンドル22と第2のハンドル42との間の整列機構相互作用は、弓形形状以外の任意の数の形状(例えば、ブロック(blook)形状または星形)を含み得る。
【0044】
使用の際に、第1の機器20のトロカール30は、第2の機器40のカニューレ50を通ってスライドする場合、第1のハンドル22および第2のハンドル44は、一緒に嵌合して複合ハンドル12を形成する。整列リッジレシーバ26によって回転に耐える整列リッジ46に加えて、第1のハンドル22は、第2のハンドル42のハンドル溝56と連結するハンドルキー36を備え得る。
【0045】
ハンドル溝56がハンドルキー36と整列せず、それにより整列リッジ46が整列リッジレシーバ26と整列しない場合、第2のハンドル42のハンドルボア48は、望ましくは第1のハンドル22のハンドルボアレシーバ28内に完全には挿入しない。この整列において、表示窓24は、トロカール30を示し、これは、好ましくはこの表示窓24を超えて延びる。またこの整列において、第1のハンドル22は、望ましくは第2のハンドル42と独立して回転し得る。
【0046】
しかし、図6Bに示されるように、ハンドル溝56がハンドルキー36と整列し、そしてそれにより整列リッジ46が整列リッジレシーバ26と整列する場合、第2のハンドル42のハンドルボア48は、第1のハンドル22のハンドルボアレシーバ28内に完全に挿入され得る。
【0047】
この操作整列において、表示窓24は、ハンドルボア48を表示する。好ましくは、ハンドルボア48は、トロカール30とは異なる色であり、その結果可視化が単純になる。またこの整列において、第1のハンドル22は、望ましくは第2のハンドル42と独立して回転しない。この整列において、複合ハンドル10は、4本の指(2本ずつの指がそれぞれ第1のハンドル22および第2のハンドル42上にある)に適応するようなサイズおよび形状にされる。
【0048】
当然、第1のハンドル22および第2のハンドル42が、非平行配向で係合するように設計され得、その結果第1のハンドル22および第2のハンドル42は、適切に係合されて複合ハンドル10を形成した場合に平行ではないことが理解されるべきである。例えば、第1のハンドル22は、星型または六角形の開口部を組み込み得、その開口に、対応する星型または六角形の第2のハンドル42が複数の配向で係合し得る。
【0049】
使用の際に、種々の力は、第1の機器20と第2の機器40との間の相対移動に抵抗する。図3に示されるように、手が複合ハンドル10を掴む場合、指によって加えられた上向きの力は、掌により与えられる下向きの力と結合し、第1の機器20と第2の機器40とを一緒に加圧する。前述したように、適切に構成された場合、これらの機器の相対回転も、望ましくは同様に妨げられる。
【0050】
(C.ハンドル材料)
(1.構造完全性)
第1のハンドル22および第2のハンドル42について選択される材料は、望ましくは、手動操作および手動の衝撃から予測される力に耐えるのに十分な構造の完全性を提供する。第1のハンドル22および第2のハンドル42は、有意に変形せずに衝撃力、押力および捻り力に耐えるのに十分な強度で、成形または鋳造された剛性材料から作製される。
【0051】
ハンドル構成の別の好ましい特徴は、第1のハンドル22および第2のハンドル42が粗くされるかまたは他の方法で手触りが残るようにされて安定したグリップ表面を提供し得ることである。
【0052】
(2.再利用)
1回のみの使用を奨励し、かつ再利用および/または再滅菌を防ぐために、新しい手工具と再利用されたかおよび/または再滅菌された手工具との間に差異をつけることが好ましい。
【0053】
最初の使用の間の、本明細書中に記載される機器および構造のいずれかに対する衝撃および手動の圧力の行使は、この機器および/または構造を構成する材料(単数または複数)へのストレスを生じる。最初の使用の間の操作負荷により生じた材料のストレスは、この構造の成形された形態を有意に変更し得、この構造の未来の性能を予測不能にする。
【0054】
例えば、1回のみの使用の間の海綿質へのトロカールおよびカニューレの前進の間に、周囲の皮質および海綿質との接触を生じる。この接触は、この構造を損傷し得、弱い局在化領域を生じ、これはしばしば視覚検出を逃れ得る。弱い局在化領域の存在は、その後の使用の間に予期せず構造欠陥を引き起こし得る。このような接触はまた、カニューレの末端表面の平坦化および/もしくは巻き上がり、またはトロカールの穿通表面の鈍化を引き起こし得る。
【0055】
さらに、1回のみの使用の間の血液および組織への曝露は、カニューレまたはハンドル構造上またはカニューレまたはハンドル構造内に生物学的成分を閉じ込め得る。クリーニングおよび続く滅菌にもかかわらず、閉じ込められた生物学的成分の存在は、許容できない発熱反応をもたらし得る。
【0056】
結果として、最初の使用後に、この構造は、確立された性能および滅菌仕様を満たさないかもしれない。1回のみの使用の間に引き起こされる材料ストレスおよび損傷の効果は、再滅菌の後の発熱反応の可能性と併せて、組織および骨において展開される機器およびハンドルについての1回のみの使用を理にかなって正当化し、そして推奨する。
【0057】
複数回使用により引き起こされる潜在的な不利な結果(疾患の伝染、または材料のストレスおよび不安定性または減少した性能もしくは予測不可能な性能を含む)から患者を保護するために、種々の材料を使用して、この手工具の再使用および/または再滅菌を表示し得、かつおそらく防止し得る。
【0058】
例えば、熱分解性材料を使用して、変形により、手工具がオートクレーブ処理されたか否かを表示し得る。さらに、化学的感受性染料(例えば、Tempilから市販されるインク)は、複合ハンドル12に塗布されて、変色により、手工具が、滅菌デバイスについてのANSI/AAMI/ISO11135:1994の必要条件の記載されるように、(例えば、エチレンオキシド(ETO)の使用により)化学的に滅菌されたか否かを表示し得る。さらに、他の滅菌方法(例えば、放射滅菌)の存在下で変色するかおよび/または物理的構成を変化する種々の材料は、手工具に組み込まれて滅菌を表示し得る。
【0059】
十分な構造の剛性を提供し、なお機器が滅菌に一般的な熱に曝露されたか否かを表示する1つの材料は、LUSTRANTM材料であり、これは、Bayerから市販される。図17Aおよび17Bに示されるように、この材料がハンドル構成に使用される場合、この材料は典型的には熱滅菌の間に変形し、望ましくはハンドル溝56がハンドルキー36と整列するのを防止し、それにより整列リッジ46が整列リッジレシーバ26と整列するのを防止する。さらに、変形に続いて、第2のハンドル42のハンドルボア48は、望ましくは第1のハンドル22のハンドルボアレシーバ28内に完全には挿入され得ない。
【0060】
(III.システムの例示的使用)
以下は、図9〜15に示されるように骨の処置の状況において、カテーテル構成要素130、診断または治療要素132、シリンジ136およびタンピング機器142と組み合わせた複合機器10、機器20、40、および70の使用を記載する。これは、これらの部材がこの目的のために有利に使用され得るからである。さらに、複合機器10が、骨の処置における使用に限定されず、診断または治療目的を実行するために組織に接触することを意図される機器にも限定されないことが理解されるべきである。第1のハンドル22および第2のハンドル42を伴った複合ハンドル12の構成は、種々の他のハンドヘルド機器に付随して使用され得る。
【0061】
複合機器10、ハンドル12、22、および42、ならびに機器20、40、64および70は、ここでヒト椎骨の処置に関して記載される。しかし、これらの使用がヒト椎骨に限定されないことが理解される。ハンドル18は、種々のヒトまたは動物の骨の型の処置においてハンドヘルド機器と共に使用され得る。
【0062】
(A.椎骨解剖)
このシステムの1つの使用は、椎体の処置である。図7Aが示すように、脊柱80は、多数の独特の形状の骨(椎骨82、仙骨84および尾骨(coccyx)86(尾骨(tailbone)とも呼ばれる)と呼ばれる)を含む。脊柱80を構成する椎骨82の数は、動物の種に依存する。ヒトでは(図7Aが示す)、24個の椎骨82が存在し、これは7個の頸椎88、12個の胸椎90、および5個の腰椎92を含む。
【0063】
側面から見た場合、図7Aが示すように、脊柱80は、S字型曲線を形成する。この曲線は、重い頭部を支持するために役立つ。4本足の動物では、脊椎の曲線はより単純である。
【0064】
図7A、7Bおよび8が示すように、各椎骨82は、椎体96を含み、これは、椎骨82の前方(すなわち、前面または胸部)側面上に延びる。図7A、7Bおよび8が示すように、椎体96は、楕円盤形状である。図7Bおよび8が示すように、椎体96は、緻密皮質骨98から形成される外部を含む。皮質骨98は、網状格子構造または海綿質102(髄様骨または海綿質(trabecularbone)とも呼ばれる)の内部容積100を取り囲む。椎間円板104と呼ばれる「クッション」は、隣接する椎体96の間に位置する。
【0065】
開口部(椎孔106と呼ばれる)は、各椎骨82の後部(すなわち、背部)側面上に位置する。脊髄神経節109は、椎孔106を通過する。脊髄108は、脊柱管107を通過する。
【0066】
椎弓110は、脊柱管107を取り囲む。椎弓110の茎112は、椎体96に隣接する。棘突起114は、椎弓110の後部から伸長し、左右の横突起116も同様に伸長する。
【0067】
(B.外科手術技術)
代表的な手順において、患者は、手術台に横たわり、一方で医師は、複合機器10を、患者の背部の軟質組織(図9においてSと示される)に導入する。医師の選択に依存して、患者は台上にうつ伏せになり得るか、または横向きになるかもしくは斜めに傾くかのいずれかであり得る。さらに、この手順は、開腹手順または前方内視鏡手順により行われ得る。
【0068】
(1.海綿質へのアクセス)
放射学的モニタリングまたはCTモニタリング下で、医師は図9に示されるように、複合機器10を軟質組織Sを通して下に、標的椎骨82へ前進させる。医師は、代表的には局部麻酔薬(例えば、リドカイン)を標的領域に投与する。いくつかの場合、医師は、他の麻酔形態(例えば、全身麻酔)を選択し得る。
【0069】
図10に示されるように、医師は、第1機器20のトロカール30および第2機器40のカニューレ50が、標的椎骨82の皮質骨98および海綿質102を穿通するように、複合機器10を方向付ける。所望の場合、医師は、複合ハンドル10を、長手方向の力をハンドル10に加えながら捻る。これに応じて、トロカール30の穿通表面35およびカニューレ50の末端表面60は回転し、そして軟質組織および/または骨を貫通する。
【0070】
好ましくは、トロカール30の遠位端34およびカニューレ50の末端表面60の穿通の深さは、皮質骨98の第1の壁を通って海綿質102に入る。しかし、皮質骨98の第1の壁を通って海綿質102に入る穿通が、複合機器10の手動の前進によって到達されない場合、医師は、手術用ハンマー(示さず)のような鈍器を用いて衝撃プレート14に穏やかに衝撃を与えることにより、また他の方法では、適切なさらなる長手方向の力を複合ハンドル12に加えて、穿通を続けて、トロカール30の遠位端34およびカニューレ50の末端表面60を前進させ得る。
【0071】
所望される場合、医師は、椎体82に最初にアクセスするために脊髄ニードルアセンブリおよびスタイレットを使用し得、次いでアクセス手順を完了するために、図18に示される代替的実施形態を利用する。図18に示される実施形態は、医師がスタイレット23を標的化した椎体82へと配置し、次いで、複合機器10を、軟部組織を通って標的化された椎体82へとスタイレット23に沿って導くことを可能にし、これは、複合機器10が軟部組織を通って椎体82へと進む場合に、トロカールの内腔21を通過する。一旦、このトロカール30が十分に皮質骨を貫通すると、医師は、この脊髄針アセンブリ23を取り除き得る。
【0072】
皮質骨98を貫通した後、所望の場合、医師は椎体96の海綿質102を通る複合機器10の前進を続け得、これによって海綿質102を通る通路を形成する。好ましくは、この通路は、椎体の95%以下を横切って伸長する。次いで、医師は、カニューレ50が皮質骨98内に残り、そして/または海綿質102への通路の一部のみ伸長するように、機器10を取り除き得る。次いで、ロカール30は、カニューレ50から取り除かれ得、カニューレ50を通って椎体82の内部に形成された通路へのアクセスが可能になる。
【0073】
あるいは、皮質骨98の貫通後、医師は、カニューレ50からトロカール30を取り除き、そしてドリルビット70を使用して海綿質102への通路を形成するために選択し得る。このような場合、医師は、第2の機器40を適切な場所に保持し、そして第1の機器20を手動で取り除くことによって、第1の機能的機器20を除去する。
【0074】
次に、図11に示されるように、医師は、カニューレ50を通ってドリルビット70を前進させる。X線制御下で(または、別の外部可視化システムを使用して)、医師は適切な捻れおよび長手方向の力をドリルビット70に加え、ドリルビット70のカッティングエッジ76を回転および前進させて、骨組織を通り海綿質102への完全な通路を開ける。この穿孔された通路は、好ましくは、椎体96の95%未満を横切って伸長する。
【0075】
この手順におけるこの時点で、海綿質102へのアクセスが達成され、そしてカニューレ50の横断面60は、カニューレ機器50のみを適切な場所に残して、内部容積100へと伸長する。
【0076】
(2.骨の処置)
図12に示されるように、今度は、医師は、カテーテル部品130を身につけ得る。この医師は、カテーテル部品130によって運ばれる診断要素または治療要素132を、ハンドルボア48およびカニューレ50を通って、椎体96の内部容積100へと前進させ得る。
【0077】
カテーテル部品130の遠位の診断要素または治療要素132は、種々の機能を行うように構成され得る。例えば、この要素132は、海綿質のサンプルを得るためまたは骨髄を収集するために、生検機器を備え得る。あるいは、この遠位要素132は、薬剤などを海綿質へと導入するためのスタイレットであり得る。あるいは(図13に示されるように)、この遠位要素132は、米国特許第4,969,888号、同第5,108,404号、および同第5,827,289号(これらは、本明細書中に参考として援用される)に開示される様式で、海綿質102を圧縮し、そして椎体96中にキャビティ134を形成するための伸長体を備え得る。海綿質102の圧縮の際に、この遠位要素132はまた、形成されたキャビティに材料を注入するためのノズル140を備え得る。
【0078】
キャビティ134の形成の際に、医師はシリンジ136および注入ノズル140を身につける。図14が示すように、このノズル140は、カニューレ50を通過するようにサイズ決めされており、これによってキャビティ134へと通過する。このノズル140は、糸を通したコネクタ186によってシリンジ136に接続される。このノズル140は、強固な金属材料(例えば、ステンレス鋼)から形成され得る。
【0079】
図14が示すように、医師は、シリンジ136を所望される容量の充填物質138で満たす。この医師は、満たしたシリンジ136にノズル140を取り付ける。医師は、カニューレ50の遠位端54を超えた選択された距離にノズル140を挿入し、ノズル140上のマーキング166によって導いてキャビティに入れる。次に、医師はシリンジ136を操作して、ノズル140を通して材料138をキャビティ134へと放出する。
【0080】
望ましいことに、医師は、カニューレ50の遠位端54から最も遠いキャビティ134の領域に、材料138を最初に導入する。この医師は、続いてカニューレ50の遠位端54に向かってノズル140を引き付けて、材料138の注入の間にキャビティ54の残りを満たす。
【0081】
この段階で、ノズル140はシリンジ104から糸をはずされる。図15が示すように、医師は次に、ノズル140を通してタンピング機器142を前進させる。タンピング機器142の遠位端は、ノズル140中の材料138の残余容量に接触する。タンピング機器142の前進は、残余物質138をノズル140から移し、これを強制的にキャビティ134に入れる。ノズル140におけるタンピング機器142の前進によって推進される材料138のキャビティ134への流れは、過度の圧力を適用することなく、キャビティ134の内部の材料138を均一に分散し、そして圧縮するために役立つ。
【0082】
図16に示されるように、シリンジ136にノズル140を取り付けることの代替として、医師は、第2の機器40のハンドルボア48にシリンジ136を直接取り付け得る。図16における代替の実施形態において示されるように、シリンジ136は、糸137または他のファスナー(例えば、スナップシット(snap−sit)ファスナーまたはルアーロックファスナー)を有し得る。この糸137は、ハンドルボア48に含まれるボアスレッド49と適合する。次に、医師はこのシリンジ136を操作して、ハンドルボア48およびカニューレ50を通って、材料138をキャビティ134に直接放出する。この処置において、医師は、シリンジ136を取り外し、そしてハンドルボア48およびカニューレ50を通してタンピング機器142を前進させて、残余材料138をカニューレ50から移し、これを強制的にキャビティ134に入れる。
【0083】
ノズル140を備えるかまたは備えないシリンジ136およびタンピング機器142の使用は、キャビティ134が材料138で満たされる場合に、医師が正確な制御を行うことを可能にする。医師は、遭遇した特定の局所的生理学的条件に従って、送達の容量および速度を直ちに調整し得る。タンピング機器142によって均一に適用される低い圧力の適用(すなわち、望ましくはカニューレの遠位端で360psi以下、より望ましくはカニューレの遠位端で190psi以下、そして最も望ましくはカニューレの遠位端で100psi以下)は、医師が、充填容量、粘性、および流路条件に迅速に応答することを可能にする。材料138の過充填およびキャビティ部分の外側への漏出の機会は、これによって有意に減少される。
【0084】
医師が、材料138のキャビティ部分の内部への十分な分散を満足させる場合、医師は、カニューレ50およびハンドルボア48からタンピング機器142を取り除く。この医師は、好ましくは、材料138との接触をきれいに断ち切るために、最初にタンピング機器142を捻る。
【0085】
当然のことながら、この手順は、1つの椎体に複数回複数の配向でアクセスし、そして処置するために繰り返され得、複数のキャビティを生成し、これは相互接続していてもしていなくてもよい。上記の様式でキャビティが満たされ、そして詰められた後に、この機器は取り除かれ、そして切開部位は縫合して閉じられ得る。骨の処置手順は完結する。
【0086】
(C.提案される材料)
望ましいことに、材料138は、身体のさらなる骨折を防ぐために、椎体内での十分な支持を提供する。負荷に耐える椎体の能力は、これによって改善される。この材料はまた、椎体の回復を促進し得る。
【0087】
選択される材料138は、ボーンセメント、あるいは従来の方法で得た自家移植または異系移植の骨移植片組織(例えば、ペースト形態(Dick,「AUse of the Acetabular Reamer to Harvest Autogenic Bone GraftMaterial:A Simple Method for ProducingBone Paste」,Archivesof Orthopaedicand Traumatic Surgery(1986),105:235−238を参照のこと)、またはペレット形態(Bhanら「A Percutaneous Bone Grafting for Nonunionand Delayed Union of Fractures of the TibialShaft」,@International Orthopaedics(SICOT)(1993)17:310−312)を参照のこと))であり得る。あるいは、この骨移植片組織は、SpineTechから市販のBoneGraft Harvesterを使用して入手され得る。漏斗を使用して、このペースト状またはペレット状の移植片組織材料を、カニューレ50に充填する。次いで、タンピング機器142は、上記の様式でカニューレ50へと前進され、ペースト状またはペレット状の移植片組織材料をカニューレ50からキャビティ134に移す。
【0088】
この選択される材料138はまた、サンゴから収穫した顆粒状骨材料(例えば、Interporeから入手可能なProOsteonTM炭酸カルシウム顆粒)を含み得る。この顆粒は、漏斗を使用してカニューレ50に充填され、そしてタンピング機器142を使用してキャビティへと進められる。
【0089】
この選択される材料138はまた、グリセロール中に懸濁した鉱物除去された骨マトリックス(例えば、Osteotechから入手可能なGraftonTM異系移植片材料)、またはNovianから入手可能なSRSTMリン酸カルシウムセメントを含み得る。これらの粘性材料は、以前に記載されたボーンセメントと同様に、シリンジ136に充填され、そして直接かまたはノズル140(これは、カニューレ50を通してキャビティ134へと挿入される)を使用してキャビティへと注入され得る。タンピング機器142は、残余材料を上記のようにカニューレ50からキャビティ134に移すために使用される。
【0090】
選択される材料138はまた、シート形態(例えば、ウシの骨由来の炭酸カルシウム粉末およびコラーゲンから作製されるCollagraftTM材料)であり得る。このシートは、管状に巻き取られ得、そして手によってカニューレ50へと充填され得る。次いで、タンピング機器142は、カニューレ50を通って前進され、この材料を押し、そしてキャビティ134内に圧縮する。
【0091】
本発明の特徴は、上記の特許請求の範囲において記載される。
(要約)
第1の機能的機器(20)が第2の機能的機器(40)に結合する場合に、第1の機能的機器(20)および第2の機能的機器(40)を備える複合機器(10)が提供される。第1のハンドル(22)が第2のハンドル(42)と結合する場合に、第1のハンドル(22)および第2のハンドル(42)を備える、複合機器のための複合ハンドル(12)が提供される。このハンドル(12)は、第1および第2の機器(20、40)の間の相対的回転に抵抗する間に、増大する機械的利点を用いて、医師による複合機器へのねじれおよび長手方向の負荷の確実な伝達を可能にする。この機器は、滅菌感応性であり、滅菌後の物理的外見が変化する。
【産業上の利用可能性】
【0092】
身体の内部領域に接近するために医師が使用する新規な手持ち式手術機器が提供される。
【図面の簡単な説明】
【0093】
【図1】図1は、第2の機能的機器と係合して、第1および第2の機器のハンドルが形成する複合ハンドルを有する複合器具を形成する第1の機能的機器の斜視図である。
【図2】図2は、第2の機器から分離した第1の機器の斜視図である。
【図3】図3は、図1に示される器具の複合ハンドルと係合する手の斜視図である。
【図4】図4は、第1の機能的機器から分離した時の第2の機能的機器のハンドルと係合した手の斜視図である。
【図5】図5は、分離されたときの、第1および第2の機能的機器のハンドルの拡大斜視図であり、複合器具が形成された場合に機能的機器の間の相対的な回転に抵抗する連結システムを示す。
【図6A】図6Aは、分離した場合の、図5に示されるハンドルの拡大側面図である。
【図6B】図6Bは、一緒に嵌合されて複合ハンドルを形成する場合の、図5に示される拡大側面図である。
【図6C】図6Cは、図6Bの複合ハンドルとともに使用するのに適したトロカールの側面図である。
【図6D】図6Dは、図6Bの複合ハンドルとともに使用するのに適したカニューレの側面図である。
【図7A】図7Aは、ヒト脊柱の横から見た図である。
【図7B】図7Bは、脊柱の一部であり、一部分がとられ、そして断面である、ヒト椎体の冠状図である。
【図8】図8は、脊柱の一部であり、一部分がとられ、そして断面である、いくつかの椎体の横から見た図である。
【図9】図9は、複合ハンドルを使用して、ねじり力および/または押す力を供給することによって、組織を介する複合機器の進行を示す斜視図である。
【図10】図10は、複合ハンドルを使用して軸方向の力および/またはねじり力を供給することによって、椎体における複合機器の展開を示す頂面図である。
【図11】図11は、椎体の頂面図であり、カニューレ機器を介するドリルビットの展開を示し、このカニューレ機器が、図9に示される複合器具の一部を形成する。
【図12】図12は、図9に示される複合器具の一部を形成するカニューレ機器を通して収縮した状態の拡張可能な構造物の展開を示す椎体の頂面図である。
【図13】図13は、図12に示される構造物が拡張して、癌性の骨に広がり、そしてキャビティを形成した後の椎体の頂面図である。
【図14】図14は、図13に示されるキャビティへの進入のために、カニューレ機器に材料を注入するための使用における、シリンジおよび取り付けられたノズルの頂面図である。
【図15】図15は、カニューレ機器から図13に示されるキャビティへ材料を移動および分布させるためのカニューレ機器におけるタンピング機器の進行を示す側面図である。
【図16】カニューレ機器を介して骨に材料を運ぶ目)、図9に示される複合ツールの一部を形成するカニューレ機器に取り付けられたシリンジの側面図である。
【図17A】図17Aは、複合ハンドルの引き続く形成を防止するために、熱消毒の結果として各々のハンドルで生じる材料の変形を示す斜視図である。
【図17B】図17Bは、複合ハンドルの引き続く形成を防止するために、熱消毒の結果として各々のハンドルで生じる材料の変形を示す斜視図である。
【図18】図18は、図1に示される複合器具に類似する複合器具の代替の実施形態の斜視図であり、展開を補助する脊椎ニードルアセンブリの通過に順応するための内部管腔を有する。
【符号の説明】
【0094】
10 複合機器
20 第1の機器
22 第1のハンドル
30 トロカール
40 第2の機器
42 第2のハンドル
50 カニューレ
【特許請求の範囲】
【請求項1】
組織を貫通するようにされた遠位端(34)及び第1のハンドル(22)を含む近位端(32)を有する第1の機器(20)と、
第1の機器(20)を通すようにされた内部管腔(44)を含む第2の機器(40)であって、第1のハンドル(22)に適合するようにされた第2のハンドル(42)を有する近位端(52)を有し、海綿質の骨の領域へのアクセスを提供するための複合機器(10)を形成し、使用者が第1の機器(20)を内部管腔(44)から取り外すことを可能にする第2の機器(40)と、
骨充填物質を注入するためのシリンジ(136)と、
第1の機器(40)が取り外された第2の機器(40)の内部管腔(44)を通るようにされた注入ノズル(140)と、を備えることを特徴とする器具。
【請求項2】
組織を貫通するようにされた遠位端(34)及び第1のハンドル(22)を含む近位端(32)を有する第1の機器(20)と、
第1の機器(20)を通すようにされた内部管腔(44)を含む第2の機器(40)であって、第1のハンドル(22)に適合するようにされた第2のハンドル(42)を有する近位端(52)を有し、海綿質の骨の領域へのアクセスを提供するための複合機器(10)を形成し、使用者が第1の機器(20)を内部管腔(44)から取り外すことを可能にする第2の機器(40)と、
第3の機器(70,130)であって、第1の機器(20)が取り外された第2の機器(40)の内部管腔(44)を通るように構成にされ、海綿質の骨の領域を処置するための遠位要素(72、132)を有する第3の機器(70、130)と、
第3の機器(70、130)が取り外された第2の機器(40)の内部管腔(44)を通るようにされた注入ノズル(140)と、を備えることを特徴とする器具。
【請求項3】
組織を貫通するようにされた遠位端(34)及び第1のハンドル(22)を含む近位端(32)を有する第1の機器(20)と、
第1の機器(20)を通すようにされた内部管腔(44)を含む第2の機器(40)であって、第1のハンドル(22)に適合するようにされた第2のハンドル(42)を有する近位端(52)を有し、海綿質の骨の領域へのアクセスを提供するための複合機器(10)を形成し、使用者が第1の機器(20)を内部管腔(44)から取り外すことを可能にする第2の機器(40)と、
第3の機器(70,130)であって、第1の機器(20)が取り外された第2の機器(40)の内部管腔(44)を通るように構成にされ、海綿質の骨の領域を処置するための遠位要素(72、132)を有する第3の機器(70、130)と、
骨充填物質を注入するためのシリンジ(136)と、
第3の機器(70)が取り外された第2の機器(40)の内部管腔(44)を通るようにされた注入ノズル(140)と、を備えることを特徴とする器具。
【請求項4】
前記注入ノズル(140)がその近位端に注入ノズル(140)をシリンジ(136)に結合するコネクタ(186)を含み、海綿質の骨の領域へ骨充填物質を搬送することを特徴とする請求項1乃至3のいずれかに記載の器具。
【請求項5】
前記骨充填物質がボーンセメントを含む請求項1、3及び4のいずれかに記載の器具。
【請求項6】
前記骨充填物質が骨移植組織を含む請求項1、3及び4のいずれかに記載の器具。
【請求項7】
前記第3の機器(130)の遠位要素(132)が海綿質の骨のサンプルを得るように構成される請求項2又は3に記載の器具。
【請求項8】
前記第3の機器(130)の遠位要素(132)が海綿質の骨を収集するように構成される請求項2又は3に記載の器具。
【請求項9】
前記第3の機器(130)の遠位要素(132)が海綿質の骨へ薬剤を導入するように構成される請求項2又は3に記載の器具。
【請求項10】
前記第3の機器(130)の遠位要素(132)が椎体内にキャビティ(134)を形成するための伸長体を備える請求項2又は3に記載の器具。
【請求項11】
前記第2の機器(40)がカニューレ(50)を含む請求項1乃至10のいずれかに記載の器具。
【請求項1】
組織を貫通するようにされた遠位端(34)及び第1のハンドル(22)を含む近位端(32)を有する第1の機器(20)と、
第1の機器(20)を通すようにされた内部管腔(44)を含む第2の機器(40)であって、第1のハンドル(22)に適合するようにされた第2のハンドル(42)を有する近位端(52)を有し、海綿質の骨の領域へのアクセスを提供するための複合機器(10)を形成し、使用者が第1の機器(20)を内部管腔(44)から取り外すことを可能にする第2の機器(40)と、
骨充填物質を注入するためのシリンジ(136)と、
第1の機器(40)が取り外された第2の機器(40)の内部管腔(44)を通るようにされた注入ノズル(140)と、を備えることを特徴とする器具。
【請求項2】
組織を貫通するようにされた遠位端(34)及び第1のハンドル(22)を含む近位端(32)を有する第1の機器(20)と、
第1の機器(20)を通すようにされた内部管腔(44)を含む第2の機器(40)であって、第1のハンドル(22)に適合するようにされた第2のハンドル(42)を有する近位端(52)を有し、海綿質の骨の領域へのアクセスを提供するための複合機器(10)を形成し、使用者が第1の機器(20)を内部管腔(44)から取り外すことを可能にする第2の機器(40)と、
第3の機器(70,130)であって、第1の機器(20)が取り外された第2の機器(40)の内部管腔(44)を通るように構成にされ、海綿質の骨の領域を処置するための遠位要素(72、132)を有する第3の機器(70、130)と、
第3の機器(70、130)が取り外された第2の機器(40)の内部管腔(44)を通るようにされた注入ノズル(140)と、を備えることを特徴とする器具。
【請求項3】
組織を貫通するようにされた遠位端(34)及び第1のハンドル(22)を含む近位端(32)を有する第1の機器(20)と、
第1の機器(20)を通すようにされた内部管腔(44)を含む第2の機器(40)であって、第1のハンドル(22)に適合するようにされた第2のハンドル(42)を有する近位端(52)を有し、海綿質の骨の領域へのアクセスを提供するための複合機器(10)を形成し、使用者が第1の機器(20)を内部管腔(44)から取り外すことを可能にする第2の機器(40)と、
第3の機器(70,130)であって、第1の機器(20)が取り外された第2の機器(40)の内部管腔(44)を通るように構成にされ、海綿質の骨の領域を処置するための遠位要素(72、132)を有する第3の機器(70、130)と、
骨充填物質を注入するためのシリンジ(136)と、
第3の機器(70)が取り外された第2の機器(40)の内部管腔(44)を通るようにされた注入ノズル(140)と、を備えることを特徴とする器具。
【請求項4】
前記注入ノズル(140)がその近位端に注入ノズル(140)をシリンジ(136)に結合するコネクタ(186)を含み、海綿質の骨の領域へ骨充填物質を搬送することを特徴とする請求項1乃至3のいずれかに記載の器具。
【請求項5】
前記骨充填物質がボーンセメントを含む請求項1、3及び4のいずれかに記載の器具。
【請求項6】
前記骨充填物質が骨移植組織を含む請求項1、3及び4のいずれかに記載の器具。
【請求項7】
前記第3の機器(130)の遠位要素(132)が海綿質の骨のサンプルを得るように構成される請求項2又は3に記載の器具。
【請求項8】
前記第3の機器(130)の遠位要素(132)が海綿質の骨を収集するように構成される請求項2又は3に記載の器具。
【請求項9】
前記第3の機器(130)の遠位要素(132)が海綿質の骨へ薬剤を導入するように構成される請求項2又は3に記載の器具。
【請求項10】
前記第3の機器(130)の遠位要素(132)が椎体内にキャビティ(134)を形成するための伸長体を備える請求項2又は3に記載の器具。
【請求項11】
前記第2の機器(40)がカニューレ(50)を含む請求項1乃至10のいずれかに記載の器具。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6A】

【図6B】
【図6C】

【図6D】

【図7A】
【図7B】

【図8】
【図9】

【図10】
【図11】

【図12】
【図13】
【図14】
【図15】

【図16】
【図17A】
【図17B】
【図18】

【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図6C】
【図6D】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17A】
【図17B】
【図18】
【公開番号】特開2011−245331(P2011−245331A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2011−170814(P2011−170814)
【出願日】平成23年8月4日(2011.8.4)
【分割の表示】特願2006−267366(P2006−267366)の分割
【原出願日】平成12年10月13日(2000.10.13)
【出願人】(508361243)カイフォン・ソシエテ・ア・レスポンサビリテ・リミテ (30)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成23年8月4日(2011.8.4)
【分割の表示】特願2006−267366(P2006−267366)の分割
【原出願日】平成12年10月13日(2000.10.13)
【出願人】(508361243)カイフォン・ソシエテ・ア・レスポンサビリテ・リミテ (30)
【Fターム(参考)】
[ Back to top ]