
株式会社不二越により出願された特許
161 - 170 / 625
電磁ポンプ
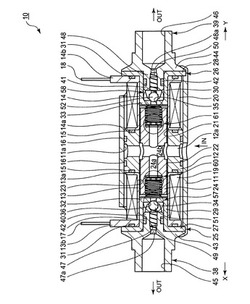
【課題】二つのボビンとガイドとをスリーブにより一体化にしてボディの半径方向位置誤差によるプランジャ摺動部の半径方向誤差を防止する。
【解決手段】電磁ポンプ10は本体11の内孔に円筒形のガイド12が液密に嵌挿されている。ボディ11の内孔11aにはガイド12の両側面に当接してボビン13、14が嵌合されている。ガイド12及びボビン13,14の内孔21にスリーブ22が嵌挿されて、該スリーブ22によりガイド12及びボビン13,14は一体化されてガイド12内に配置されている。スリーブ22にはプランジャ24が嵌挿され、プランジャ24の両端面に隣接して吐出側本体38、39が設けられている。プランジャ24の両端面には吸入逆止弁60,61が設けられ、吐出側本体38、39に吐出逆止弁57,58が設けられている。
(もっと読む)
切削工具及びうねり形状の作製方法

【課題】切削加工において工具と被加工材料の摩擦を低減し、切削工具の長寿命化、切削動力の低減、仕上げ面性状の改善を図ること。
【解決手段】工具の表面に幅1μm〜20μm、深さ0.1μm〜10μmのおおきさの微細なうねり形状を設けることを特徴としている。微細なうねり形状を設けることで、うねりが油溜まりとしての作用や接触面積の減少を促し、工具と被削材の間の摩擦が低減され、切削抵抗、工具摩耗を抑制することができるようになる。
(もっと読む)
スプライン転造加工用平ダイス
【課題】食付勾配歯部において転造加工用平ダイスの弾性戻りによる歪みを防止し、高精度の累積ピッチ誤差を含む歯形加工精度を得ることができる転造加工用平ダイスを提供。
【解決手段】平ダイスの食付勾配歯部4の歯先線9は平ダイスの移動方向Fに対して傾斜させ、食付勾配歯部4の加工歯のピッチ線13及び歯底線17は平ダイスの移動方向Fに対してそれぞれ平行にされ、仕上げ歯部7の歯先線10は平ダイスの移動方向Fに対して平行であり、かつ仕上げ歯部7の加工歯の前半部5のピッチ線15及び歯底線19は食付勾配歯部4の歯先線9に対してそれぞれ平行にされていることにより、仕上げ歯部7の加工歯の前半部5で、歯面方向にのみ食い込みを行うようにしてワークの歯底の食い込みを行わないようにし、仕上げ歯部7の後半部6の加工歯のピッチ線16及び歯底線11は平ダイスの移動方向Fに対してそれぞれ平行にされている。
(もっと読む)
電磁ポンプ
【課題】二つのボビン部材と往復動部材とのクリアランスより、該往復動部材とガイド部材とのクリアランスを大きくすることにより軸芯方向に対する横方向吸引力を低減し摩耗を防止する。
【解決手段】電磁ポンプ10は本体11の内孔に円筒形のガイド12が液密に嵌挿されている。ボディ11の内孔11aにはガイド12の両側面に当接してボビン13、14が嵌合されている。ガイド12及びボビン13,14の内孔21にプランジャ24が嵌挿され、該プランジャ24の両端面に隣接して吐出側本体38,39が設けられている。プランジャ24の両端面には吸入逆止弁60,61が設けられ、吐出側本体38,39に吐出逆止弁57,58が設けられている。
(もっと読む)
産業用ロボットのハンド装置
【課題】各指毎に各1個のモータを必要とせず、さらに、システムが異常を検出した非常停止時など、ハンド装置への電源を遮断せざるを得ないときも、ハンド装置は把持力を維持することができ、把持しているワークを落下させることがないられない産業用ロボットのハンド装置を提供。
【解決手段】ボールねじ 2の軸方向にフレーム内周にスライド可能に案内されたブロック 4と、ナット16の小径切り込み部15下面とブロックの小径部17下面との間に配置されたスプリング 9(弾性体でもよい)と、を有し、サーボモータ 3を作動させることにより各フィンガー 5の他端が開閉動作するようにし、各フィンガー 5の他端がワーク10に当たった後、さらにスプリング 9を所定量変形するまでサーボモータ 3を作動させた後、サーボモータ 3のブレーキ13を作動させた状態でワーク10を把持させるようにした。
(もっと読む)
溶製合金鋼およびそれを用いた金型
【課題】耐摩耗性および疲労特性を向上させた合金鋼、材料組織中の炭化物や介在物などに起因する割れなどを抑制した金型を提供する。
【解決手段】重量%で、C:0.6〜1.0%、Si:2.0%以下、Mn:1.0%以下、Cr:3.5〜6.5%、Mo:5.0%以下、W:3.5%以下、V:1.8〜4.0%、Co:0.1〜5.5%、N:100ppm以下を含み、残余がFe及び不可避不純物からなる溶製合金鋼の鍛造・圧延軸に平行な任意の断面において、合金中に含有する第1のMC型炭化物の大きさと面積率を制御する。また、第2のMC型炭化物とM6C型炭化物から成る凝集体の大きさを制御する。さらに、CaOを主成分とする非金属介在物の大きさと量を一定量に制限する。
(もっと読む)
産業用ロボットの出力トルク制限回路
【課題】力センサにて検出されたトルク信号の確実性を確保することにより、産業用ロボットのツール先端での出力トルクの制限を適切に与えることが可能な産業用ロボットのトルク制限回路を提供する。
【解決手段】多軸で構成される産業用ロボットにおいて、各軸駆動部に取り付けた力センサにて検出されたトルク信号と駆動部の指令トルクとがあらかじめ設定した許容値以上の不一致を検出した場合に駆動回路を遮断するようにした。これにより、力センサにて検出されたトルク信号が正しいか否かの検証をし、出力トルクの制限を可能にするという効果を奏するものとなった。
(もっと読む)
ラジアルピストンポンプまたはモータ
【課題】簡単な構造で、本体に固定されたピントルに複数のピストンを有するシリンダを相対回転可能にされたラジアルピストンポンプ又はモータのシリンダとピントル摺動部の潤滑性を改善し、また、焼き付きを防止し、高圧、高回転運転を可能とする。
【解決手段】ピントル12の外周面12aとシリンダ20の内周面20との摺動面にドレーン溝で囲まれ、ポートとは離隔した低圧摺動面42a,42bを形成する。ピントル12の外周面に2本の周溝38,39を形成し、ドレーン溝とし周溝間に低圧摺動面42a,42bを形成するとよい。低圧摺動面42a,42bに油溝43を設け、ジャーナル軸受構造を形成する。
(もっと読む)
マイクロバルブを有する微細流路
【課題】構成が簡単で製造が容易であり、かつ従来のマイクロバルブと同程度に機能し得るマイクロバルブを有する微細流路を提供する。
【解決手段】微細流路1aのマイクロチャンネル3が備える第1の反応流体Aの流路6および第2の反応流体Bの流路7の所定位置に、マイクロバルブ10,11をそれぞれ備える。マイクロバルブ10,11は、微粒子状磁性体の滞留領域12,14と、これに対応して磁界の作用をおよぼし得る位置にそれぞれ付設した磁石機構13,15とをそれぞれ有する。これにより、磁石機構13,15による磁界の作用時には、凝集した微粒子状磁性体が滞留領域12,14に密着して流路を閉塞する。また、磁界の非作用時には、凝集した微粒子状磁性体が、滞留領域12,14内で移動するか第1の反応流体Aおよび第2の反応流体B中にそれぞれ分散して流路6,7を開放する。
(もっと読む)
油圧駆動装置
【課題】エンジンの回転数に応じて目標差圧を変更する機能を保持した状態で、固定ポンプの吐出ラインの圧力損失を低減して省エネを図った油圧駆動装置を提供。
【解決手段】油圧駆動装置10は、絞り上流圧18の圧力Pp1と絞り下流圧19の圧力Pp2を導き、その差圧を検出する回転数検出弁46を設置する。回転数検出弁46は本体47に摺動自在に嵌挿されたスプール53の大径部側にピストン56が摺動自在に嵌挿されている。スプール53の小径部側にスプリング45が内装され、スプール53の内孔に設けられた絞り上流圧18及び絞り下流圧19に連通する固定絞り41が設けられている。スプール53の小径部側の受圧面積A1、ピストンの受圧面積A2及びスプールの大径部とピストン56との径差の受圧面積A3が同じなるようにスプール53の径を選定する。
(もっと読む)
161 - 170 / 625
[ Back to top ]