
株式会社安川電機により出願された特許
201 - 210 / 2,482
可変界磁回転電機
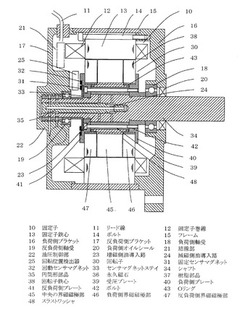
【課題】2組の界磁磁極部の相対角度を正確に検出することで、さらなる広範囲高効率運転が達成できる可変界磁回転電機を提供できるようにする。
【解決手段】固定子巻線12と固定子鉄心13を設置した固定子10と、界磁用磁石が設置された回転子30と、前記回転子30の回転位置検出器25と、を有する回転電機において、相対的に回動する2組の界磁磁極部46,47の各々に回転位置検出のための信号発生手段を設けたことを特徴とする可変界磁回転電機。
(もっと読む)
制御盤

【課題】制御盤内の機器と外気との接触を遮断しつつ筐体の小型化の要求や筐体に内蔵される機器の増加にも対応して十分な放熱、冷却を行うことができる制御盤を提供する。
【解決手段】筐体の天井部3bに熱交換器3を備えるとともに開閉扉の筐体内側にダクト5を備え、熱交換器3に外気を取り込む第1のファン3cと、筐体内の内気を筐体後部を通って熱交換器3へと送る第2のファン7と、熱交換器3を通過した内気を筐体前部へ下向きに送る第3のファン3dとを備え、第3のファン3dの下方にてダクト5に配設されて内気をダクト5内へ吸気する第4のファン5aと、ダクト5の第4のファン5aより下方に配設されてダクト5内から筐体2内へ排気する第5のファン5bをさらに備える。
(もっと読む)
搬送ロボット
【課題】直動搬送機構を用いることなく省スペース化を図ること。
【解決手段】搬送ロボット10は、スイングアーム部11と、アームユニット12とを備える。スイングアーム部11は、基端部に設けられたスイング軸P1を中心として水平方向に揺動する。アームユニット12は、スイングアーム部11の先端部に設けられた鉛直な旋回軸P2を中心として回転する本体部121と、本体部121に連結され水平方向に伸縮する右伸縮アーム部122Rおよび左伸縮アーム部122Lと、右伸縮アーム部122Rおよび左伸縮アーム部122Lの先端にそれぞれ設けられたワーク保持部123R,123Lとを備える。
(もっと読む)
電力変換装置
【課題】導通損失が大きくなるのを抑制することが可能な電力変換装置を提供する。
【解決手段】この電力変換装置100は、片方向スイッチ11〜28と、入力側端子と複数の片方向スイッチ11〜28との間に設けられる直流インダクタ31〜36とをそれぞれ含む3個の電流形インバータ回路1〜3を備え、電流形インバータ回路1〜3の入力側端子を短絡するとともに、3個の電流形インバータ回路1〜3の出力側端子同士を並列接続し、3個の電流形インバータ回路1〜3にそれぞれ設けられる直流インダクタ31、33および35(32、34および36)同士を結合させて、片方向スイッチ11〜28のオンオフに基づいて、結合された直流インダクタ31〜36の巻線間において電流が移動する動作が行われるように構成されている。
(もっと読む)
ロボット制御装置
【課題】動作時に制御回路の動作環境が悪化することを抑制することができるロボット制御装置を提供すること。
【解決手段】制御対象のロボットを制御する制御回路を収納する筐体の天板および一枚の側板に吸気孔を配設し、吸気孔が配設された側板に隣接する側板に排気孔を配設するとともに、吸気孔から筐体内へ吸気した外気を排気孔から筐体外へ排気するファンを配設してロボット制御装置を構成する。筐体は、制御回路が配置されていない空隙であって吸気孔が配設された側板から当該側板と対向する側板へ向けて延伸する通気路を、吸気孔が配設された側板および天板と内接するように備える。
(もっと読む)
筐体および半導体製造装置
【課題】内蔵する装置の配置を最適化した筐体および半導体製造装置を提供すること。
【解決手段】上部に設置したフィルタを通過した清浄なダウンフローの気流を外部と隔離する筐体であって、昇降機構を有する胴体と、上記胴体の上で水平方向に回転自在な第1アームと、上記第1アームの先端上で水平方向に回転自在な第2アームと、上記第2アームの先端上で水平方向に回転自在なハンドとを有しており上記ハンドに搭載した基板を搬送する搬送ロボットを上記筐体内に備え、上記筐体は、平面視した場合に矩形であり、上記矩形の長辺の1つには、カセットオープナを取り付けるための開口が設けられており、上記搬送ロボットは、上記開口の正面に設置され、上記第1アームの長さは、上記矩形の短辺の長さ未満であり、かつ、上記短辺の長さに近づけられ、上記第1アームの長さと上記第2アームの長さとの和は、上記短辺へ到達する長さである。
(もっと読む)
ロータユニット、風力発電システム、回転電機、発電機および回転電機の組立方法
【課題】回転軸部を片持ち状に固定可能なロータを備える構成において、回転軸部がロータに固定される際の組立工程が複雑になるのを抑制することが可能なロータユニットを提供する。
【解決手段】このロータユニットは、回転軸部2aにロータコア32を片持ち状に固定可能な回転軸支持部33を含むロータ31と、回転軸部2aに回転軸支持部33が固定されていない状態において、ロータ31を固定するとともに、回転軸部2aに回転軸支持部33が固定された場合において、ロータコア32を覆うカバーになるように構成され、かつ、回転軸部2aへの回転軸支持部33の固定時にロータ31をステータ21の内部に案内するための第1貫通孔41aが形成されたカバー兼用冶具41と、を備える。
(もっと読む)
筐体および半導体製造装置
【課題】内蔵する装置の配置を最適化した筐体および半導体製造装置を提供すること。
【解決手段】上部に設置したフィルタを通過した清浄なダウンフローの気流を外部と隔離する筐体であって、昇降機構を有する胴体と、上記胴体の上で水平方向に回転自在な第1アームと、上記第1アームの先端上で水平方向に回転自在な第2アームと、上記第2アームの先端上で水平方向に回転自在なハンドとを有しており上記ハンドに搭載した基板を搬送する搬送ロボットを内部に備え、上記搬送ロボットは、上記筐体へ作業者がアクセスする側壁である正面壁寄りに配置される。
(もっと読む)
筐体および半導体製造装置
【課題】内蔵する装置の配置を最適化した筐体および半導体製造装置を提供すること。
【解決手段】上部に設置したフィルタを通過した清浄なダウンフローの気流を外部と隔離する筐体であって、昇降機構を有する胴体と、上記胴体の上で水平方向に回転自在な第1アームと、上記第1アームの先端上で水平方向に回転自在な第2アームと、上記第2アームの先端上で水平方向に回転自在なハンドとを有しており上記ハンドに搭載した基板を搬送する搬送ロボットを上記筐体における正面側または背面側の側壁である第1の側壁寄りの内部に備え、上記第1アームの長さである第1アーム長は、上記第1アームの回転軸である第1アーム回転軸と上記第1の側壁との距離よりも長く、上記昇降機構の昇降軸は、上記第1アームの旋回範囲内、かつ、上記第1の側壁からみて上記第1アーム回転軸よりも上記筐体内の奥側に配置される。
(もっと読む)
ハンドおよびロボット
【課題】異なる大きさや形状のワークを確実に把持すること。
【解決手段】直線軸に沿って互いに接近する向きあるいは遠ざかる向きにスライドする1組のスライド部と、スライド部のそれぞれに固定され、先端部分に把持爪を有する把持部とを備え、把持部は、上記の直線軸および把持爪の先端を含む平面と直交する向きの回転軸まわりに回転する関節部、たとえば、把持爪の先端向きを変更するように回転する第1の関節部と、第1の関節部の位置を変更するように回転する第2の関節部とを備えるようにハンドおよびロボットを構成する。
(もっと読む)
201 - 210 / 2,482
[ Back to top ]