
株式会社安川電機により出願された特許
161 - 170 / 2,482
電力変換装置及びそのコンデンサカバー
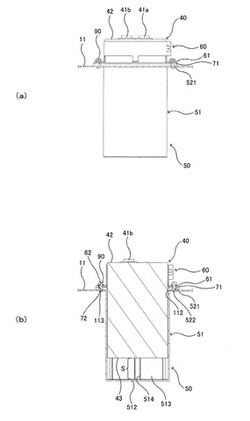
【課題】コンデンサの冷却効率を良好に保ちつつ、コンデンサを円滑に挿入できるコンデンサカバーと、それを用いた電力変換装置を提供する。
【解決手段】電力変換装置は、複数の電子部品を有する本体部を筐体ベース11の前側に配置し、冷却風が通風される風洞部を筐体ベース11の後側に配置した筐体と、筐体ベース11に貫通して設けられ、一部が本体部内に配置されると共に、残りの部分が風洞部内に配置された、円筒状のコンデンサ40と、筐体ベース11に設けられ、コンデンサ40の上記残りの部分を覆う有底円筒状のコンデンサカバー50とを備えている。そして、コンデンサカバー50は、弾性を有する材料で構成されており、コンデンサ40の外径寸法と略等しい内径寸法である内周面513に、円筒軸方向に沿って設けられた溝514を有する。
(もっと読む)
交流電動機の制御装置

【課題】 運転状態によって電動機特性が大きく変動してもロバストで高効率な位置センサレス駆動を可能とする交流電動機の制御装置を提供する。
【解決手段】 トルク指令T*を制御位相θ∧を用いて分解し、交流電動機の機械出力に寄与する成分をδ軸電流指令、寄与しない成分をγ軸電流指令として出力する電流分配器3Aと、前記δ軸、γ軸電流指令とδ軸、γ軸電流検出のそれぞれが一致するように制御する電流制御器5と、前記電流制御器の出力と前記交流電動機のインダクタンスでの電圧降下量との加算量のγ軸成分がゼロとなる位相を算出し、前記制御位相θ∧として出力する位相推定器8と、を備える。
(もっと読む)
ロボット
【課題】エンドエフェクタが取り付けられる構成において、ロボットの動作精度が低下するのを抑制することが可能なロボットを提供する。
【解決手段】このロボット1は、第2上腕部142と、第2上腕部142の一方端部に設けられた手首関節部15とを備え、第2上腕部142には、手首関節部15を介して第2上腕部142に取り付けられるハンド17を動作させるためのθ軸モータ23が設けられている。
(もっと読む)
電力変換装置及びリアクトル
【課題】ケーブル貫通部の防水構造に関する組立作業性を向上できるようにする。
【解決手段】筐体ベース11に略垂直な方向に自立したケーブル41が、筐体ベース11に設けられた貫通孔112に挿通されて本体部20と風洞部30との間で配線されている。ケーブル挿通用のグロメット50は、グロメット固定部材60によって筐体ベース11の貫通孔112に固定されており、このグロメット固定部材60は、本体部20内に筐体ベース11とは別に設けられている。
(もっと読む)
ロボットシステムおよびロボットシステムの駆動方法
【課題】撮像部の性能が低下するのを抑制することが可能なロボットシステムを提供する。
【解決手段】このロボットシステム(ロボットシステム100)は、ハンド部17が取り付けられる手首関節部14と、手首関節部14に着脱可能に取り付けられ、ワーク200を撮影してワーク200の位置を確認するための位置確認用カメラ4と、手首関節部14およびハンド部17の駆動を制御する制御部21とを備え、制御部21は、ハンド部17により把持されたワーク200を加工機300に移動させる前に、位置確認用カメラ4をハンド部17から取り外す動作を行うように制御するように構成されている。
(もっと読む)
交流電動機の巻線切替装置及び交流電動機駆動システム
【課題】交流電動機の駆動制御における安全性を向上させる。
【解決手段】インバータ1により給電される3相交流モータ2に備えられた、第1電機子巻線11及び第2電機子巻線12に係わる巻線切り替えを行う、交流電動機の巻線切替装置であって、第1電機子巻線11及び第2電機子巻線12のうち第1電機子巻線11にインバータ1からの供給電力を導く第1状態と、第1電機子巻線11及び第2電機子巻線12の両方にインバータ1からの供給電力を導く第2状態とを、切替可能な、第1〜6スイッチS1〜S6を有し、これら第1〜6スイッチS1〜S6が、インバータ1又は3相交流モータ2の異常検出状態に対応した、巻線切替装置3の外部からの非常用切替制御信号に応じて、複数の電機子巻線11,12に加わる電圧を低電圧化する電流経路を形成する。
(もっと読む)
交流電動機の巻線切替装置及び交流電動機駆動システム
【課題】生産性の向上及び製造コストの低減を図る。
【解決手段】インバータにより給電される3相交流モータ2に備えられた3相の第1電機子巻線11及び第2電機子巻線12に係わる巻線切り替えを行う、3相交流電動機の巻線切替装置3であって、第1電機子巻線11及び第2電機子巻線12のうち第1電機子巻線11にインバータからの供給電力を導く第1状態と、第1電機子巻線11及び第2電機子巻線12の両方にインバータからの供給電力を導く第2状態とを、切替可能な、スイッチS1〜S6を有し、これらスイッチS1〜S6は、3相にそれぞれ対応した3つの絶縁ゲート型バイポーラ・トランジスタ素子からなるスイッチを2組備えるとともに当該2組のスイッチに含まれる6つの絶縁ゲート型バイポーラ・トランジスタ素子を一体化して構成された半導体モジュールを、少なくとも1つ有している。
(もっと読む)
駆動機構およびロボット
【課題】小型化することが可能な駆動機構を提供する。
【解決手段】この駆動機構は、B軸回りに回動するT軸駆動ギア部225と、T軸駆動ギア部225と噛合するとともにT軸駆動ギア部225によりT軸(θ軸)回りに回動される手先部16とを含むT軸回動機構部と、T軸駆動ギア部225の内側に配置され、B軸回りに回動するθ軸駆動ギア部235と、手先部16の内側に配置され、θ軸駆動ギア部235と噛合するとともにθ軸駆動ギア部235によりθ軸(T軸)回りに回動されるθ軸従動ギア部237とを含むθ軸回動機構部とを備え、B軸は、T軸およびθ軸方向から見て、手先部16およびθ軸従動ギア部237の回動中心から距離D1だけオフセットした位置に配置されている。
(もっと読む)
電力変換装置及びフィルタスイッチ
【課題】フィルタ機能の有効化及び無効化を容易に切り替えることができるようにする。
【解決手段】電力変換装置1は、スイッチング素子241で発生するノイズの交流電源2への伝導を低減するフィルタ回路251A,251Bが設けられたフィルタ基板25A,25Bと、フィルタ基板25A,25Bを含む複数の電子部品を有する本体部20を筐体ベース11の前側に配置し、冷却風が通風される風洞部を筐体ベース11の後側に配置した筐体10と、フィルタ回路251A,251Bと筐体10との間の導通と遮断とを切り替え可能なフィルタスイッチ26A,26Bとを有している。そして、フィルタスイッチ26A,26Bは、筐体ベース11の前側に配置されている。
(もっと読む)
ロボットシステムおよびロボットシステムを用いた検査方法
【課題】複数の画角から把持対象物を検査することが可能なロボットシステムを提供する。
【解決手段】このロボットシステム(ロボットシステム100)は、下部アーム12と上部アーム13とワーク200を把持するためのハンド部17が取り付けられる手首関節部14とを含むロボット1と、ロボット1の駆動を制御する制御部21と、ロボット1とは別個に固定的に設置され、ハンド部17により把持されたワーク200を検査するための検査用カメラ6とを備え、制御部21は、ハンド部17によりワーク200を把持するとともに、ロボット1を駆動することによってワーク200の姿勢を複数変化させながら、検査用カメラ6によりワーク200を検査する動作を行うように制御するように構成されている。
(もっと読む)
161 - 170 / 2,482
[ Back to top ]