
株式会社安川電機により出願された特許
141 - 150 / 2,482
ハンドおよびロボット
【課題】異なる大きさや形状のワークを把持すること。
【解決手段】互いに接近する向きあるいは遠ざかる向きにスライドする1組のスライド部と、かかるスライド部のそれぞれに固定される支持部と、少なくとも1つの支持部の先端部に取り付けられ、上記のスライド部のスライド軸と平行な回転軸まわりに回転する回転部と、上記の回転軸と直交し、かつ、それぞれ異なる向きに取り付けられる複数の把持爪とを備え、上記の1組のスライド部は、互いに平行な上記のスライド軸に沿ってそれぞれスライドするようにハンドおよびロボットを構成する。
(もっと読む)
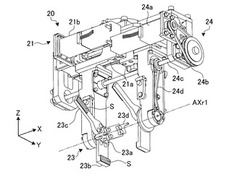
リニアモータ

【課題】ロバスト性を向上しつつ、体格を小型化することができるようにする。
【解決手段】リニアモータ1は、第1シャフトSH1と、第1シャフトSH1と平行となるように並列配置された第2シャフトSH2と、第1シャフトSH1と第2シャフトSH2の端部を連結する2つの連結部材3と、第1シャフトSHが貫通する第1貫通孔4を有する第1フレーム2Aと、第2シャフトSH2が貫通する第2貫通孔8を有する第2フレーム2Bと、スケール101及びセンサ103を有し、スケール101とセンサ103とのギャップ方向Aが、第1シャフトSH1の軸線AX1と第2シャフトSH2の軸線AX2とを含む面方向Bと略一致するように配設されたリニアエンコーダ10とを備え、第1シャフトSH1、第2シャフトSH2、及び連結部材3を可動子30、第1フレーム2A及び第2フレーム2Bを固定子40として、軸方向に相対的に進退移動する。
(もっと読む)
電子機器および電子機器が設けられた電力変換装置
【課題】比較的高温の動作環境下においても、発熱部品から発生した熱を効率よく放熱させることにより、信頼性を安定して保持することが可能な電子機器を提供する。
【解決手段】このフィルタモジュール(電子機器)101は、コイル11、抵抗2およびコンデンサ3を含むフィルタ回路と、フィルタ回路のコイル11および抵抗2に近接して配置され、コイル11および抵抗2から発生する熱を放熱する放熱板7とを備える。
(もっと読む)
ブレーキ制御装置、モータ制御装置および自動機械
【課題】ブレーキの異常状態を容易に検出することが可能なブレーキ制御装置を提供する。
【解決手段】このブレーキ制御部7は、拘束対象であるロータ11とともに回転するブレーキハブ22を拘束する際に、ブレーキハブ22を押圧する2つのアーマチュア20aおよび20bの各々に設けられた第1検出器28aおよび第2検出器28bにより検出された2つのアーマチュア20aおよび20bの各々の移動位置の検出結果に基づいて、2つのアーマチュア20aおよび20bの各々がブレーキハブ22を拘束した状態であるかまたは解除した状態であるかを判別するアラーム判別回路30を備える。
(もっと読む)
マトリクスコンバータ
【課題】双方向スイッチの制御を容易に行うことができるマトリクスコンバータを提供すること。
【解決手段】交流電源2の各相と負荷3の各相とを接続する複数の双方向スイッチを備えた電力変換部10と、複数の双方向スイッチを制御する制御部20とを備える。制御部20は、負荷側相間電圧Vuv,Vvw,Vwuのうち最大の相間電圧を、当該最大の相間電圧にする相と交流電源側相間電圧Vrs,Vst,Vtrのうち最大の相間電圧が入力される相との接続を行う双方向スイッチを制御して生成する。また、制御部20は、負荷側相間電圧Vuv,Vvw,Vwuのうち中間の相間電圧を、当該中間の相間電圧にする相と交流電源側相間電圧Vrs,Vst,Vtrのうち中間の相間電圧が入力される相との接続を行う双方向スイッチを制御して生成する。
(もっと読む)
モータ及びモータ用ブレーキ
【課題】構成を簡素化し、低コスト化できるようにする。
【解決手段】モータ100は、回転軸1に設けられた回転子9及びフレーム2に設けられた固定子10を有するモータ電磁部3と、モータ電磁部3の反負荷側に配置され、回転軸1の制動を行うブレーキ部4とを備えている。ブレーキ部4は、励磁コイル19が収容されたフィールドコア12と、フィールドコア12に対し回転軸1の軸方向に移動可能に支持されたアーマチュア13と、フィールドコア12とアーマチュア13との間に介装された制動ばね14と、回転軸1に固定され、制動ばね14のばね力によりアーマチュア13が摩擦係合するブレーキディスク15とを有している。ブレーキディスク15及びアーマチュア13の対応する位置には、ブレーキディスク15側より貫通してフィールドコア12に締結する固定ねじ16用の貫通孔29,25が設けられている。
(もっと読む)
ロボットの教示システムおよび教示方法
【課題】力制御やソフトフローティングを用いることなく、またワークを把持したロボットで作業そのものと同等の動作を必要とすることなく、組立作業の教示を行うことができるロボットの教示システムおよび教示方法を提供する。
【解決手段】ロボット1に取り付けられ、弾性的に変位可能な接触プローブ4と、ロボット1に取り付けられ、接触プローブ4と被作業対象物52との接触を検出する外力検出器2と、ロボット1の動作を制御する位置速度制御部66と、接触プローブ4の接触状態が検出された場合、接触プローブ4の位置に基づいて接触位置を導出する接触位置計算部61と、複数の接触位置から被作業対象物52の位置姿勢を計算する位置姿勢計算部62と、計算された被作業対象物52の位置姿勢に基づきロボットの組み付け作業プログラムを生成する作業プログラム生成部63を備える。
(もっと読む)
ロボットシステム
【課題】ウエハを多段に収納するカセット内のウエハを安全に取り出すこと。
【解決手段】進入可否判定部が、移載対象となるウエハの直下および直上のクリアランスに基づいてハンドが進入可能であるか否かを判定する。そして、進入可否判定部によって進入可能であると判定されたならば、位置補正部は、ハンドの最終的な進入位置を、マッピングされた収納位置に基づいて算出し、算出した進入位置に基づいてロボットを制御するようにロボットシステムを構成する。
(もっと読む)
ロボット
【課題】特異点の回避による不都合を生じさせることなく被作業物に対して作業を行うこと。
【解決手段】第1の回転軸A1を中心としてエンドエフェクタを回転可能に支持する第1アーム部と、第1の回転軸A1に対して垂直な第2の回転軸A2を中心として第1アーム部を回転可能に支持する第2アーム部と、第2の回転軸A2に対して垂直な第3の回転軸A3を中心として第2アーム部を回転可能に支持する第3アーム部とを備え、第1アーム部が、第2アーム部からの延在方向d1に対して垂直な向きに第1の回転軸A1を備える。
(もっと読む)
金属加工装置及び金属部材の製造方法
【課題】ダイレス成形であっても、製造される曲げ部材の加工精度のばらつきをきわめて小さく抑制する。
【解決手段】長尺の素材41に、素材41の軸方向へ移動する高温部41aを部分的に形成しながら、高温部41aを境として素材41の一方の端部側及び/又は他方の端部側を支持する産業用ロボットのマニピュレータを、予め設定した目標移動軌跡に基づいて移動させて高温部41aに曲げモーメントを与えることによって、曲げ部材を製造する際に、移動時におけるマニピュレータの軌道の測定値あるいは推定値と、目標移動軌跡との偏差を求め、この偏差が予め定めた閾値を超える場合に素材1の次以降の素材の加工における目標移動軌跡を修正して設定する。
(もっと読む)
141 - 150 / 2,482
[ Back to top ]