
三井造船システム技研株式会社により出願された特許
1 - 10 / 13
舶用エンジン制御装置および方法
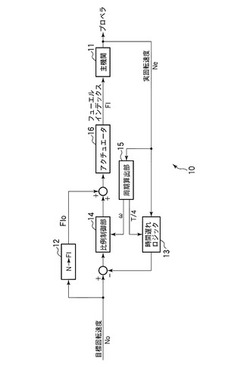
【課題】プロペラトルクが一定となる主機制御を行い、スラスト変動を抑え、推進効率を向上する。
【解決手段】主機関11の実回転速度Neを検出し、時間遅れロジック13および周期算出部15に入力する。周期算出部15において実回転速度Neの変動周期を検出し、時間遅れロジック13において実回転速度Neを4分の1周期分の遅延して負帰還する。目標回転速度Noとフィードバック信号の偏差を比例制御部14に入力し、周期算出部15で求められた周期から算出される実回転速度Neの変動角速度ωに対応するゲインで比例演算を行う。N/FI変換部12において目標回転速度Noに対応するフューエルインデックスFIoを算出し、比例制御部14からの出力と加算する。
(もっと読む)
エンジン制御装置および方法

【課題】負荷変動に操作量を追従させながらも操作量の変動を抑制し、エンジン出力の変動を抑えて燃費の向上を図る。
【解決手段】目標回転数Noとエンジン10の実回転数Neの偏差をPID演算部11に入力する。PID演算部11において、I演算部13の出力に対してのみ上限リミッタ15を設ける。P演算部12、上限リミッタ15、D演算部14の出力を足し合わせ上限リミッタ16に出力する。上限リミッタ16からの出力されるフューエルインデックスFIeをエンジン10の操作端に出力し、燃料供給量を制御する。
(もっと読む)
舶用エンジンの制御装置および方法
【課題】船舶の主機回転数を負荷変動に追従させながらもエンジンへの負荷を軽減し、燃費の向上を図る。
【解決手段】エンジン11の実回転数Neを検出し、制御部12の入力側にフィードバックする。実回転数Neおよび制御部12からエンジン11に出力されるフューエルインデックスFIeをRσ演算部13へ入力する。Rσ演算部13において、実回転数NeとフューエルインデックスFIeから負荷抵抗係数を算出する。負荷抵抗係数の変動成分の実効値Rσを求める。実効値Rσに応じて目標回転数Noを下方修正する。
(もっと読む)
舶用エンジン制御システムおよび方法
【課題】新たにセンサを設けることなく海象の変化を判断し、海象に応じたガバナ制御を行うことにより燃費を向上する。
【解決手段】舶用エンジン制御システム10において、制御指令として目標回転速度Noを設定する。負荷抵抗係数算出ブロック24において実フューエルインデックスFIeと主機関13の実回転速度Neから負荷抵抗係数Rを求める。出力制御を行う第2制御モードが選択されるとき、回転速度/出力変換ブロック16において負荷抵抗係数Rの所定時間に亘る平均値Ravを用いて、目標回転速度Noが目標出力Poに変換される。また、フューエルインデックス制御を行う第3制御モードが選択されるとき、回転速度/フューエルインデックス変換ブロック12において、平均値Ravを用いて目標回転速度Noが目標フューエルインデックスFIoに変換される。
(もっと読む)
舶用エンジン制御システムおよび方法
【課題】新たにセンサを設けることなく海象の変化を判断し、海象に応じたガバナ制御を行うことにより燃費を向上する。
【解決手段】舶用エンジン制御システムにおいて、負荷抵抗係数Rを実回転速度NeとフューエルインデックスFIから算出する。負荷抵抗係数Rの変動周期と変動の実効値をパラメータとして制御マップを構築する。変動周期が短く主機関の応答性が低い場合や、変動の実効値が小さく、波浪の影響は小さいがノイズの影響が大きい場合には、燃料噴射量を一定とするフューエルインデックス制御を行う。変動周期が長く、十分な追従性が得られる場合や、変動の実効値が大きく、レーシングが起こるような波浪の影響が大きい場合には、主機関(プロペラ)回転速度を一定に維持する回転速度制御を行う。2つの運転モードの中間領域では、主機関の出力を一定に維持する出力制御を行う。
(もっと読む)
ガバナ制御装置および制御方法
【課題】ターボ過給機を備えたエンジンにおいて、ターボラグを考慮してより精密なガバナ制御を行い燃費の改善を図る。
【解決手段】ターボ過給機13Tを備える船舶用の主機13の実回転数を実回転数検出ブロック14において検出する。回転数指令とされた実回転数の偏差をPID演算部15に入力する。PID演算部15の出力とPID制御規制部17の出力をスイッチ16に入力し、一方の出力を選択的にガバナ指令として燃料供給装置18に出力する。スイッチ16の切り替えを、回転数指令と実回転数との比較を行う比較部19により制御し、負荷増大時や加速時に、ターボラグ期間に渡ってPID制御規制部17の出力をガバナ指令とする。PID制御規制部17は、ターボラグ期間に渡って現ガバナ指令を1%ずつ増大させる。
(もっと読む)
舶用エンジンのガバナ制御装置および制御方法
【課題】船体のローリングによる影響を考慮したガバナ制御を行い、燃費の改善を図る。
【解決手段】シャフト11を介してプロペラ12に連結される主機13の実回転速度を検出する(エンジン実回転速度検出ブロック14)。ロールレートセンサから船体ローリングの回転速度信号を取得し(船体ローリング検出ブロック16)、ローリングの回転速度である変動回転速度を計算する(変動回転速度計算ブロック17)。エンジン実回転速度に変動回転速度を加算することでエンジン実回転速度を対水プロペラ回転速度に修正し、入力側へとフィードバックして主機13の燃料投入量をPID制御する(PID制御ブロック15)。
(もっと読む)
機関回転数算出装置およびガバナ制御システム
【課題】負荷変動による回転数変動を維持しつつも簡略な構成で機関の脈動の影響が除去された回転数を算出する。
【解決手段】回転数設定部12において設定された目標回転数に実回転数をフィードバックしてPID制御部13へ入力する。回転数の入力に基づきPID制御部13からガバナ指令を燃料ポンプ14に出力し、内燃機関11への燃料噴射量を調整する。内燃機関11の主軸15にターニングギア16を設ける。パルス信号発生装置18においてターニングギア16の歯に対応したパルス信号を生成する。パルス信号に基づき回転数演算部19で実回転数を算出する。回転数の算出にパルスの時間間隔を積算した値を用い、積算される期間を内燃機関の脈動周期に対応させる。
(もっと読む)
測定領域確認装置および測定領域確認方法
【課題】測定現場における測定プログラムの修正等を未然に防ぐ。
【解決手段】要素抽出部12によりファセットが抽出されると、ベクトル算出部13は、そのファセットに対する照射方向ベクトルV1を算出する。角度算出部14は、そのファセット毎に、照射方向ベクトルV1と法線ベクトルV2との角度αを算出する。判定部15は、角度αに基づいて対応するファセットの測定可能性を判定する。
(もっと読む)
位置表示システムおよび携帯端末装置
【課題】様々な場所で地理情報を表示することができる位置表示システムおよび携帯端末装置を提供する。
【解決手段】所定の位置に配設された情報記録媒体2は、その所定の位置に関する位置情報が記録されている。このような情報記録媒体2が配設された場所の住所を知りたいユーザは、入力部31を操作することにより地理機能部38cを起動させるとともに、表示部34に表示される指示に従って情報取得部35に情報記録媒体2を撮像させる。撮像が行われると、地理機能部38cは、その撮像データに対して画像処理を行うことにより位置情報を取得する。位置情報を取得すると、地理機能部38cは、その位置情報に基づいて地理情報を表示部34に表示させる。情報記録媒体2には位置情報として住所が記録されているので、表示部34には、情報記録媒体2が配設された位置の住所が地理情報として表示される。
(もっと読む)
1 - 10 / 13
[ Back to top ]