
サイバーオプティクス コーポレーションにより出願された特許
1 - 10 / 10
高速光学センサ検査システム
【課題】電子部品を、高速に検査する光学システムを提供する。
【解決手段】センサは、カメラのアレイに対してノンストップで移動する加工対象物に関する画像データを取得するように構成されたカメラのアレイを含む。カメラのアレイが画像データを取得するとき照明のパルスを提供するために照明システムが配置されている。少なくともいくらかの画像データは、加工対象物上のスキップマーク又はバーコードに関するデータを含む。又取得した複数の画像により立体画像化する。
(もっと読む)
高速高解像度三次元太陽電池検査システム
光学検査システム及び方法が提供される。加工対象物輸送機構が加工対象物(12)をノンストップで移動させる。照明装置(40)が、ライトパイプを含み、第一及び第二のストロボ照明野タイプを提供するように構成されている。第一(3)及び第二(5)のカメラ(2)アレイが、加工対象物(12)の立体画像化を提供するために配設されている。第一のカメラアレイ(3)は、第一の照明野を用いて加工対象物(12)の第一の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第二の複数の画像を生成するように構成されている。第二のカメラアレイ(5)は、第一の照明野を用いて加工対象物(12)の第三の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第四の複数の画像を生成するように構成されている。処理装置が、第一、第二、第三及び第四の複数の画像の少なくともいくつかを記憶し、他の装置に提供する。 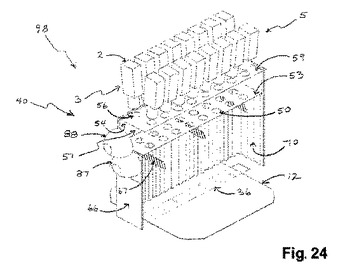 (もっと読む)
(もっと読む)
カメラアレイ及びコンパクトな組み込み照明装置を備えた高速光学検査システム
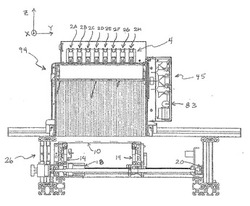
ワークピース(10)を検査するための光学検査システムが提供される。システムは、ワークピース(10)をノンストップで輸送するように構成されたワークピース輸送機構(26)を含む。照明装置(45)が、第一のストロボ照明野タイプ及び第二のストロボ照明野タイプを提供するように構成されている。照明装置(45)は、ワークピース(10)に近い第一端及び第一端とは反対側にあり、第一端から離間した第二端を有するライトパイプを含む。ライトパイプはまた、少なくとも一つの反射性側壁(70)を有する。第一端は出口アパーチャを有し、第二端は少なくとも一つの第二端アパーチャ(50)を有して、それらを通してワークピース(10)の視認を提供する。カメラアレイ(4)が、ワークピース(10)をデジタル式に画像化するように構成されている。カメラアレイ(4)は、第一の照明野を用いてワークピース(10)の第一の複数の画像を生成し、第二の照明野を用いてワークピース(10)の第二の複数の画像を生成するように構成されている。処理装置が、照明装置(45)及びカメラアレイ(4)に操作可能に結合され、第一及び第二の複数の画像の少なくともいくつかを記憶し、他の装置に提供するように構成されている。 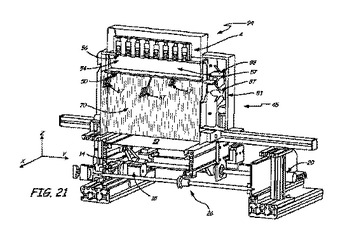 (もっと読む)
(もっと読む)
多数のエリアアレイ型画像検出器を使用するヘッド搭載部品アライメント

【課題】ピック・アンド・プレイス機械のノズルに保持されたときに部品のオフセットおよび方向を検知するセンサを提供する。
【解決手段】センサは、複数の2次元カメラ300と、バックライト照明装置306と、コントローラ308とを含む。各カメラはピック・アンド・プレイス機械のノズルを含む視野を有する。バックライト照明装置は照明を複数の2次元カメラに向けるように構成されている。バックライト照明装置は複数の2次元カメラからノズルの反対側に位置決めされている。コントローラは複数の2次元カメラおよびバックライト照明装置に接続されている。コントローラは、複数の2次元カメラによって検出された、バックライトで照らされた複数の影の画像に基づいて(複数の)部品302のオフセットおよび方向情報を決定するように構成されている。コントローラはオフセットおよび方向情報をピック・アンド・プレイス機械のコントローラに供給する。
(もっと読む)
電子機器組立て機のための組込み検査画像アーカイブ
ピックアンドプレース機102は、ピックアンドプレース機102内の少なくとも1つの部品に関連する動作に関する、少なくとも1つの画像を取得するための映像系106を含む。少なくとも1つの画像は、部品に関連する動作に対応付けられた1つ又は複数の追跡キーとともに蓄積される。そして、画像148及び対応付けられた追跡キー142のデータベース144は、制御不能であるか又は制御不能である恐れがある態様を識別するために、ピックアンドプレース機102の動作を分析するために使用できる。  (もっと読む)
(もっと読む)
組み込み型半田ペースト検査を備える電子アセンブリマシン
ピックアンドプレースマシン(10、201)は、配置のために、部品(304)を解放可能に把持するように構成された配置ヘッド(206)を含む。ロボットシステムは、配置ヘッド(206)に結合されて、配置ヘッド(206)と工作物(203)との間の相対運動を生成する。画像取得システム(305)は、部品(304)が配置される前に、意図された部品(304)配置(352)位置の少なくとも一つの画像を取得するように構成される。制御部(298)は、画像取得システム(350)に動作可能に結合され、制御部(298)は、少なくとも一つの配置前画像を処理して、意図された配置位置(352)にデポジットされた半田(354、356)に関連する基準値を生成するように構成される。  (もっと読む)
(もっと読む)
改善された構成部品ピックイメージ処理を備えたピックアンドプレース機
ピックアンドプレース機(10、201)は、ピック動作の前のノズル(208、210、212)のイメージ及びピック動作の後の一つ以上のイメージを取得するように配置されたセンサ(205)を含む。これらのイメージに基づくイメージ解析が、ピック動作を分類するために使用することができる重要な特徴を明らかにする。一部の実施態様では、複数のピック後イメージが異なるポーズ(角配向)で取得される。  (もっと読む)
(もっと読む)
電子アセンブリ機械の部品ピッキング動作を評価するための方法及び装置
改善されたピッキング評価を有する電子アセンブリ機械(10、201)が提供される。本装置(10、201)は、部品(304)を着脱可能にピックアップして保持するための少なくとも一つのノズル(208、210、212)を有する取り付けヘッド(206)を含む。ロボットシステムが備えられて、取り付けヘッド(206)と、工作物(203)、たとえば回路基板との間の相対運動を生成する。画像取得システム(300)が配設されて、部品ピックアップ位置(16)の少なくとも一つのピッキング前画像と、部品ピックアップ位置(16)の少なくとも一つのピッキング後画像とを得る。ピッキング前画像は複数の画像部を含み、異なる視点からのピックアップ位置の視界を各画像部にとらえさせる一方で、ピッキング後画像は複数の画像部を含み、異なる視点からのピックアップ位置の視界を各画像部にとらえさせる。  (もっと読む)
(もっと読む)
改良された部品ピックアップ検査を有するピックアンドプレース機械
本発明の実施態様は、ピックアンドプレース機械(10、201)により行われる部品レベル検査を改良する。そのような改良は、機械(10、201)内部のピッキングイベントの画像を収集することと、発生したときにエラーを識別することにより、ピックアンドプレース機械(10、201)のピッキング動作を検査することを含む。機械上でこの情報が発生したときにこれを検出して表示することにより、オペレータまたは機械は、すみやかかつ効果的な修正措置を取ることができる。  (もっと読む)
(もっと読む)
検査を向上させたピックアンドプレース機械
本発明の実施形態は工作物に関連する位置情報と、工作物に関連して取得される検査情報との間の関連を提供する。この関連により、ユーザまたは技術者が、検査情報がかかわる工作物(310)上の物理的な位置を迅速に特定することの助けとなる。その後工作物上の検査された部品(104)の位置の指示とともに、部品検査情報をオペレータに供給することができる。 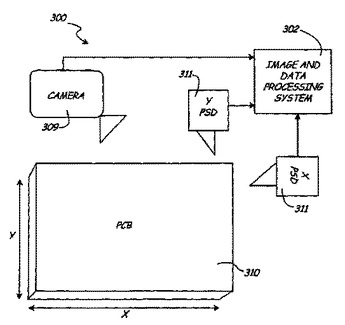 (もっと読む)
(もっと読む)
1 - 10 / 10
[ Back to top ]