
レイセオン カンパニーにより出願された特許
201 - 210 / 244
ミッションプロファイリング
ミッションプロファイリングの方法は、人間活動を含む人間モデルを生成すること、及びシステム機能を含むシステムモデルを生成することを含む。当該方法はまた、オペレーション活動を含むオペレーショナルノードモデルを生成すること、及び人間モデル、システムモデル、及びオペレーショナルモデルを統合することであって、統合ミッションモデルを形成することを含む。  (もっと読む)
(もっと読む)
海洋哺乳動物に影響を及ぼす確率が低いソナーシステム及び方法
「海洋哺乳動物に影響を及ぼす確率が低い」(LPMMI)音波信号は、LPMMI波形と概ね同じ持続時間成分、概ね同じ帯域幅成分及び概ね同じ中心周波数成分を有するが、或る周波数変調を含む変調成分を有する、別の波形に従って別の音波信号を送信する場合に生じることによる海洋哺乳動物の行動反応を低減するように選択される、変調成分を有する。  (もっと読む)
(もっと読む)
3つのハンドルウェハを用いた高性能PIN焦点面構造を製造するための方法

【課題】
【解決手段】 本発明は、一部、製造工程中の異なる時点で3つのハンドルウェハがウェハに接着されるシリコンPIN検出器部品を製造するための方法に関する。製造中に3つのハンドルウェハを用いることによって、用いない場合には、比較的薄く且つもろいウェハに関する取り扱いに係る問題を大幅に緩和され、PIN検出器部品を構成するウェハの一部を補強するための安定的で且つ強固な基板が提供される。発明の変形例においては、第3ハンドルウェハは、関連する波長において透明な光学素子を備えている。
(もっと読む)
ジンバル軸を横切って巡らされた光ファイバ・アセンブリ
制御機構が、光ファイバ・アセンブリをジンバル外の光源からジンバルの軸を横切ってジンバル上の光学素子へと案内するため、光ファイバ・アセンブリをジンバルの回転とともに動くようにジンバル上およびジンバル内ならびにジンバル間において固定する。この制御機構は、ファイバ・アセンブリを、たるんだファイバ・アセンブリがジンバルおよびジンバル外の同心のトラックに拘束されるよう、一端をジンバル外で固定のガイド・トラックに固定し、他端をジンバルで回転するガイド・トラックへと固定して、「U字形」のループにて案内するように適切に構成されている。ジンバルが回転するのに従って、ループは、常に自身のU字形を維持しつつ、一方のガイド・トラックに着座し、他方のガイド・トラックから離れる。制御機構は、ファイバ・アセンブリの一端をジンバル外に固定し、直接的にジンバルを越えるようにファイバ・アセンブリを通し、ジンバルの反対側でファイバ・アセンブリを固定するように構成されている。  (もっと読む)
(もっと読む)
送受信モジュールを有する音響システムの方法及び装置
音響システムの音響方法及び装置は、共通の送/受信制御信号に従って送信ソナーアレイの送信音響素子に送信することができ、受信ソナーアレイの受信音響素子から受信することができる送受信モジュールを使用する。  (もっと読む)
(もっと読む)
L1/L5バイアス推定を有する広域補強システムのための方法及び装置
広域補強システム(WAAS)は、L1/L5バイアス推定を含む。L1電離層遅延及びL1電離層遅延レートの推定値を受信し、GEO勾配電離層遅延を受信し、GEO衛星のユーザ電離層垂直誤差情報を受信し、L1電離層遅延及びL1電離層遅延レートの推定値並びにGEO勾配電離層遅延からL1/L5バイアス推定値を計算する。 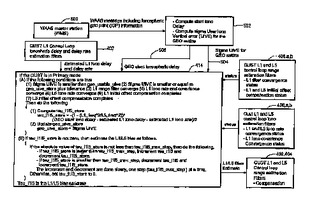 (もっと読む)
(もっと読む)
アンテナ・トランシーバー・システム

音声、デジタルデータ、レーダー信号およびIR信号を送信し受信し、そして処理するアンテナ・トランシーバ−・システム100が提供される。本システム100は、複数の放射素子110,112,114を有するアンテナアレイ102を含んでおり、各素子110,112,114は、送受信(T/R)モジュール104,106,108に接続されている。各T/Rモジュール104,106,108は、入力信号のビームパスに沿ってリターン信号を送信する位相器200,202,204と位相共役モジュール206,208,210を含んでいる。本システム100は、コンパクトなタイル400に統合されている垂直に整列されている複数の平面402に配置されている。本タイル400は、ユーザのヘッドギア500中に埋め込まれており、システムのハンドフリーな操作が可能となる。代わりに、本システム100は、車両700、人間が持ち運びできるバックパック800、または他の指定されたプラットフォームに統合することもできる。 (もっと読む)
コンパクトな多層回路
コンパクトな多層信号処理システム10である。実施形態ではシステム10はマイクロ波信号で使用するように構成されている。システム10は入力信号を受信し、その入力信号を選択的に第1の信号パスへ導く第1の機構24を含む。第2の機構50-56、34、36、58-64は入力信号を第1の信号パスに沿って、1以上の層16-22を通る第1の回路コンポーネント96へ経路を指定する。第1の回路コンポーネント96は入力信号の受信に応答して調節された信号を出力する。第3の機構26、80-86、72、74、88-94は調節された信号をシステム10の出力78へ導く。特定の実施形態では、1以上の層16-22は1以上の接地平面層18、20を含んでいる。第1の機構24は制御装置40と通信する入力スイッチングネットワーク24を含む。スイッチングネットワーク24はスイッチング層14に位置され、入力信号を複数の入力信号パスのうちの1つへ選択的に切換えることを促すために1以上の制御装置40、44と通信する。第2の機構50-56、34、36、58-64は少なくとも1つの接地平面層18を通り垂直に入力スイッチングネットワーク24から第1の回路コンポーネント96の入力端部まで延在する第1の入力導波体50、54、34、58、62を含む。第3の機構26、80-86、72、74、88-94は1以上の水平な接地平面層18を通して垂直に第1の回路コンポーネント96の出力端部からスイッチング層14上に配置される出力スイッチングネットワーク26まで延在する第1の出力導波体80、84、72、88、92を含む。 (もっと読む)
荷重支承無限軌道車アセンブリ
第1および第2の端部を有するフレーム(26)と、フレームに連結されかつフレームの第1の端部に隣接して配設される第1の端部ローラ(12)と、フレームに連結されかつフレームの第2の端部に隣接して配設される第2の端部ローラ(14)と、各それぞれのローラと接触可能な内側および表面と接触可能な外側を有するベルト(28)とを含む、表面に沿って移動させられることができる無限軌道車装置。  (もっと読む)
(もっと読む)
背面多層信号ルーティングを有するMMIC
MMICチップを有する単結晶ウェハを提供することを含む方法。各チップは、ウェハによって設けられる半導体基板の第1の表面部分にある能動デバイスと、半導体基板の第2の表面上に配置される第1の部分を有する電気配線とを有する。半導体基板の構造は、その中を貫通するバイアを有し、電気配線の第2の部分は、バイアの中を通って、能動デバイスに電気的に接続される。多層配線構造がウェハ上に形成され、チップのうちの対応するチップの第2の表面部分の上に信号ルーティングセクションを設ける。各セクションは誘電体層及び電気導体を有し、そのような電気導体は、能動デバイスに電気信号をルーティングするために、そのような能動デバイスに電気的に結合される。各チップ及び対応する信号ルーティングセクションが、ウェハから切り離される。  (もっと読む)
(もっと読む)
201 - 210 / 244
[ Back to top ]