
アキュレイ インコーポレイテッドにより出願された特許
11 - 13 / 13
埋め込みフィデューシャルを用いることなく内部標的部位を追跡するための装置及び方法
埋め込みフィデューシャルを用いることなく、治療中に内部標的部位の位置を特定するための方法及び装置が提供される。該方法は、内部標的部位を含む関連空間を示す複数の第1画像を生成する工程と、治療中に関連空間のライブ画像を生成する工程と、このライブ画像を複数の第1画像の一つと突き合わせる工程とを含む。第1画像は内部標的部位を示すので、ライブ画像を第1画像の一つに突き合わせる工程は、第2画像自体が標的部位の位置を示すかどうかにかかわらず、標的部位の位置を特定する。第1画像は、CTスキャン、磁気共鳴画像及び超音波画像といったどのような3次元画像であってもよい。ライブ画像は例えばX線画像であり得る。 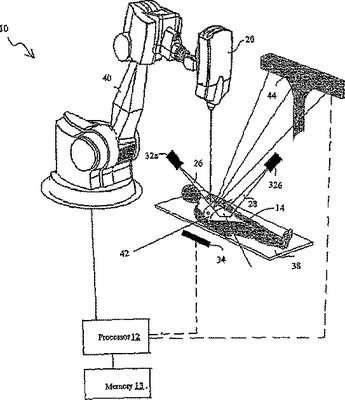 (もっと読む)
(もっと読む)
運動中の標的の動的追跡
運動(サイクルPの周期的運動である場合がある)を行う解剖学的領域内に位置する治療標的、例えば腫瘍又は病変部を動的に追跡する。解剖学的領域の非剛的運動及び変形について1組のCT又は他の3D画像から4D数学的モデルを構築する。4D数学的モデルは、解剖学的領域の部分の3D場所をP内における時間的位置の関数として追跡対象の標的に関連付ける。術前DRRと術中x線画像との非基準非剛体画像位置合わせ方式を用いて解剖学的領域の標的及び(又は)他の部分の絶対位置を突き止める。運動センサ、例えば表面マーカを用いてサイクルPを求める。1)非剛体画像位置合わせの結果、2)4Dモデル、3)P内における時間的位置を用いて放射線ビームを投与する。 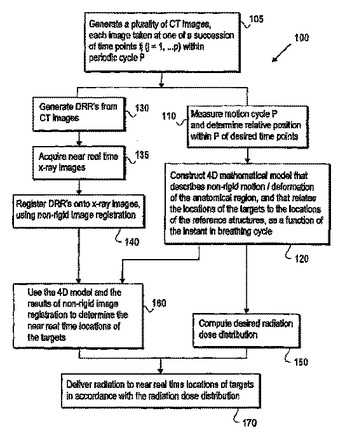 (もっと読む)
(もっと読む)
患者位置決めアセンブリ
【課題】支持装置の位置及び配向を必要に応じて調整することができるような、支持装置の動作を制御する動的動作制御機構を含む患者位置決めアセンブリを提供する。
【解決手段】治療的放射線処置のためのロボット患者位置決めアセンブリは、処置中に患者を移動しかつ支持するためのロボット位置決め装置と、該ロボット位置決め装置の位置を検出するためのセンサ・システムと、及び該ロボット位置決め装置の位置データを受信するために該センサ・システムに動可可能に接続されかつ該ロボット位置決め装置の動作を制御するために該ロボット位置決め装置に動作可能に接続された制御装置とを含む。制御装置は、ように、該ロボット位置決め装置に装着された患者内の処置標的がs治療的放射線処置システムの放射線源と適切に位置合わせされるように、該センサ・システムから受信した該ロボット位置決め装置の位置を表す情報に応じて該ロボット位置決め装置の動作を制御するように構成されている。
(もっと読む)
11 - 13 / 13
[ Back to top ]