
アイティーティー マニュファクチャリング エンタープライジーズ エルエルシーにより出願された特許
81 - 90 / 114
化学検出デバイスまたはシステムの検出能力を高めるための空気サンプラモジュール
空気サンプラモジュールが、分光技術を使って、表面上の液体および/または固体をモニターする検出デバイスと共に使用するために提供される。該空気サンプラモジュールは、ハウジングと、該検出デバイスによって分析されるべき空中に浮遊する脅威を含んでいる空気を収集するための取り入れ口と、収集された空気の分析を可能にするために該検出デバイスの光学トランシーバーの該ハウジングへの通信を可能にするポートとを含んでいる。このように、分光検出システムの能力は、空中に浮遊する脅威を分析する能力を含むように拡張される。  (もっと読む)
(もっと読む)
拡張現実を使用して装置の保守命令および動作命令を表示するシステムおよび方法
ヘッドマウントディスプレイは、見られている対象の拡張された光景をユーザに提供し、カメラなどの追跡メカニズムは、見られている対象に対するヘッドマウントディスプレイの位置および向きを繰り返し決定し(図1)、そして、コンピュータシステムは、拡張された光景に対する情報を提供し、ディスプレイの決定された位置および向きに基づいて、見られている対象の拡張された光景を繰り返し更新する。ヘッドマウントディスプレイは、シースルーディスプレイであり得る。シースルーディスプレイは、ビデオベースまたは光学ベースであり得、シースルーディスプレイは、モノスコーピックおよび立体視であり得る。追跡メカニズムは、見られている対象上の1つ以上のマーカまたはビーコンを使用して対象の位置を決定する。マーカは、能動的または受動的であり得、不可視光を放謝する発光ダイオード(LED)を含む。  (もっと読む)
(もっと読む)
既知の光源とラマン散乱とを使用したスペクトログラフの較正
ラマン散乱分析のために使用される分光器デバイスを較正するために、方法が提供される。分光器デバイスの回折格子またはスペクトログラフに対する所定の分散曲線が、較正光源からの検出された分散光と関連付けられるスペクトルデータに基づいて修正されることにより、修正された分散曲線を生成する。光検出デバイスにおける、ラマン光源の波長が、決定される。分光器デバイスに対する較正データが、第1の化学物質に対するラマン線のピーク位置と、検出デバイスにおける、ラマン光源の波長と、修正された分散曲線とから計算される。  (もっと読む)
(もっと読む)
高出力且つ多様な偏向のクローバー形フェーズドアレイ
フェーズドアレイアンテナ(6)が、基板(11)と、基板上にマイクロストリップとして形状に適応するように取り付けられた複数の放射要素(8)とを有している。複数の放射要素の各々は、三角形の形状を有しており、4つの放射要素が、交差蝶ネクタイ・クローバー形放射体を形成するべく配列されている。更に、4つの放射要素は、放射要素の2つの対を形成しており、放射要素の2つの対は、互いに直交している。放射要素は、基板の前面上に配置されており、RF中心導体(21、22、23及び24)が、基板の裏面に向かって直交するように方向付けられ、且つ、RF信号を1つの放射要素に供給するべく複数の放射要素の中の1つに接続されている。  (もっと読む)
(もっと読む)
コンピュータシミュレーションの終了判定
物理的実験のコンピュータ実装されるシミュレーションを終了するか否かを判定するための方法が提供される。物理的実験をモデル化するコンピュータ実装されるシミュレーションに関連する計算が、物理的実験に関連する所望の結果が発生するかを決定するために実行される。計算の結果が、所望の結果が発生したことを示すか否かを決定するために、計算の結果を評価される。所望の結果が発生しなかった場合、所望の結果が起こり得ない、したがって発生しないという少なくとも1つの否定的な指示に関して、計算の結果が周期的に評価される。少なくとも1つの否定的な指示が存在する場合、コンピュータ実装されるシミュレーションに関連する計算は終了される。  (もっと読む)
(もっと読む)
コンピュータシミュレーションおよび分析のための粒子への物体離散化
物理的実験に関するコンピュータにより実現されるシミュレーションに関与する物体を表すデータを生成するための、コンピュータにより実現される方法を提供する。物体の一部分の幾何学的寸法の範囲を少なくとも超えて拡張する、基礎的親体積領域を記述するデータを生成する。次に、基礎的親体積領域を子体積領域に再分割することによって生成される子体積領域を記述するデータを生成し、各々の寸法は、前記基礎的親体積領域の寸法の分数である。組における子体積領域の寸法に基づいて、物体の部分の位置に粒子を均一に分配するデータを生成し、各粒子に関するデータは、位置における質量密度、速度、圧力、応力、およびエネルギを記述し、粒子の収集は、コンピュータにより実現されるシミュレーションにおいて使用する物体の部分を表す。  (もっと読む)
(もっと読む)
光ファイバスクリーンを使用した暗視装置内におけるインジケータライトの表示

【課題】ユーザに対して暗視装置の状態について視覚的に通知する改善された方向に対するニーズが存在している。本発明は、このようなニーズに対処するものである。
【解決手段】暗視装置は、互いに動作可能な関係において配設されたイメージインテンシファイア・チューブ(14)と光ファイバスクリーン(20)を含んでいる。光ファイバスクリーンは、複数の光ファイバの長手方向の束を含んでいる。溝(24)が、光ファイバスクリーン内に形成され、長手方向の束に対して横方向に延長している。インジケータ(16,18)が、束の外部表面に隣接し且つ溝の近傍に配置されており、この場合に、溝は、インジケータから射出された光をユーザによる観察のために向け直すように構成されている。溝は、長手方向の束の外部表面の一部の周りに円周状に形成可能である。溝は、複数の切断された光ファイバの端部部分の表面を含んでいる。
(もっと読む)
物体相互作用シミュレーションのための区分メッシュ化および近傍検索
2つ以上の物体の相互作用に関するコンピュータにより実装されるシミュレーションのための方法が提供される。物体の各々を表す粒子を記述するデータは、物体の幾何学的データから生成される。各粒子に関するデータは、対応する物体の位置における質量密度、速度、およびエネルギを記述する。複数の区分を含む計算メッシュを規定するために、粒子は区分にグループ化され、この場合、各区分は、物体に関連付けられる粒子が存在し得る空間位置における体積領域である。複数の選択粒子の各々について、選択粒子に関する影響のある領域内に存在するいわゆる近傍粒子が決定される。複数の時間ステップの各々における粒子の質量、速度、エネルギ、圧力、応力、および位置に関する更新値を生成するために、質量、エネルギ、および運動量の保存則に基づき、計算を実行する。  (もっと読む)
(もっと読む)
関連する化学物質、器具、およびプロセスを用いて観察可能なデータを分析し、関連付けるためのデータベースシステムおよび方法
ユーザが、他の方法では識別されないプロセス(112)に関連付けられる観察を特徴付けることを可能にするデータベースシステム(20)および方法が提供される。データモデル(100)に従い、物質、プロセスおよび器具(122)のデータを格納するデータベースが確立され、データモデルは、物質、プロセスおよび器具の属性(116)に関する。観察データまたは観察可能なもの(210)と呼ばれる、観察に関連付けられる情報は検索基準としてシステムに入力される。観察データは、1つ以上の物質および/または処理器具の名前から、観察された物質および/または器具の香り、色、および状態のテキスト記述の複雑さの範囲にあり得る。システム(220)は、1つ以上のプロセス(230)のリストを返すために、検索基準を使用してデータベースを検索し、該1つ以上のプロセスは、観察データを作り出し、プロセスをより完全に特徴付ける。  (もっと読む)
(もっと読む)
粉塵軽減および表面洗浄のシステム
表面を洗浄するための粉塵軽減および洗浄のシステムは、洗浄される表面を含む部分の少なくとも一部分の周りに固定可能であるシステム筐体を含む。システム筐体は、洗浄される表面に向かって、かつ、洗浄される表面と概ね整列して、システム筐体の中で延びている中空部材を含み、システム筐体の出口は、中空部材によって画定される。ダクト部分は、システム筐体の一部分に固定され、かつ、システムが置かれている周囲の環境からガス状の流体(例えば、空気)を受け取る入口と、システム筐体と連絡する出口とを含む。システムはさらに、ダクト部分に配置された圧力生成器を含み、ファンの動作が、システム筐体の内側部分と、周囲の環境との間の圧力差を生成し、それにより、ダクト部分を介してシステム筐体に引き込まれたガス状の流体が、中空部材によって画定された出口を介してシステム筐体の内側部分から除去される。 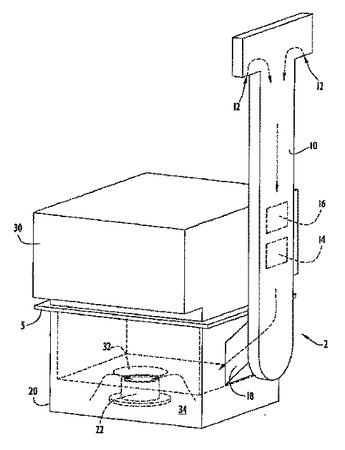 (もっと読む)
(もっと読む)
81 - 90 / 114
[ Back to top ]