
レストレーション ロボティクス,インク.により出願された特許
1 - 10 / 13
頭皮を採取、保存、および移植するシステムおよび方法
【課題】毛髪移植処置の実行に有用である、生体ユニット、特に毛包ユニット(FU)を採取し、保存し、移植するシステムおよび方法を提供する。
【解決手段】FUは、患者にくっついているか切り取った組織片である体表面から採取され、複数の受け部を有するカートリッジに移動される。受け部は除去ツールの方へ開口しているが、受け部の近位端部を覆うカバーによってFUがカートリッジから出るのが防止される。このカバーは許容性媒体でなり、これは液体透過性および/または穿孔可能である。FUを進める方法の一つは圧力差を設けることであり、例えば受け部の近位端に吸引力をかける。シャトルサブシステムが自動化されたロボットシステム内に組み込み可能であり、あるいはシャトルサブシステムは半自動またはマニュアルの装置の一部を構成してもよい。
(もっと読む)
毛嚢ユニットの採収および移植用の自動システム

【課題】画像ガイドロボットシステムなどのロボットシステムが、正確に制御された毛嚢ユニットの採収および移植を実施するロボットシステムを提供する。
【解決手段】ロボットアーム27と、当該ロボットアームに搭載された採収および/または移植カニューレ38、36と、前記ロボットアーム27に搭載された1またはそれ以上のカメラ28と、前記1またはそれ以上のカメラで撮像された画像を受信して処理するよう構成されたプロセッサと、前記プロセッサに機能的に接続され前記ロボットアームの配置の少なくとも一部を前記1またはそれ以上ののカメラで撮像された画像に基づいて制御するよう構成されたコントローラとを具え、前記ロボットアームは前記カニューレが近接する体表面に対し所望の向きとなるよう位置決め可能であることを特徴とするロボットシステム25である。
(もっと読む)
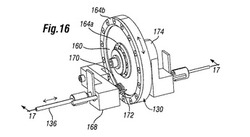
回動保持部材を有する毛包単位の除去器具
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
毛嚢ユニットの採収および移植用の自動システム
【課題】画像ガイドロボットシステムなどの自動化システムを用い、正確に制御された毛嚢ユニットの採収および移植を実施するシステムを提供する。
【解決手段】ロボットアーム27と、当該ロボットアームに搭載された採収および/または移植カニューレ38と、前記ロボットアームに搭載された1またはそれ以上のカメラ28と、前記1またはそれ以上のカメラで撮像された画像を受信して処理するよう構成されたプロセッサと、前記プロセッサに機能的に接続され前記ロボットアームの配置の少なくとも一部を前記1またはそれ以上ののカメラで撮像された画像に基づいて制御するよう構成されたコントローラとを具え、前記ロボットアームは前記ツールが近接する体表面に対し所望の向きとなるよう位置決め可能であることを特徴とする自動化システムである。
(もっと読む)
画像から生成した空間配置皮膚モデルを用いて毛髪を採取および移植するシステムおよび方法
採取する毛包単位に対して毛髪採取器具の向きを合わせるシステムおよび方法が提供されている。さらに、毛包単位を移植するシステムおよび方法が提供されており、これらは既存の毛包単位の向きまたは予め決められた挿入角度に基づいている。提供されたシステムおよび方法は、画像処理および画像から生成した空間配置皮膚モデルを利用する。幾つかの実施形態では、表面適合は、平面適合、二次曲面適合、3次元適合、メッシュ適合、およびパラメータ適合を利用して実行される。 (もっと読む)
毛髪移植用の皮膚テンショナ
特に毛髪移植処置における毛包単位の除去および移植をするため、皮膚領域に張力を適用するデバイスおよび方法が提供されている。このデバイス(20、130、160、180、200、240、253、260、290、310)は、皮膚を保持する少なくとも2の皮膚接触部材を有するフレーム(22、132、162、204、262、292)を具えうる。皮膚接触部材を離れて移動させ、その結果、その間の皮膚に張力を生成する力を適用する様々な方法も開示されている。これらのデバイスおよび方法は、皮膚接触部材を皮膚に確実に固定する効果がある吸引を組み込んでもよい。鉤状部(28、72、98、116、194、172、152)またはマイクロ鉤状部を用いて、皮膚接触部材を皮膚に固定するのを助けることもできる。フレームは、複数の方向に外向きに適用される張力で皮膚領域を囲むことができる。調整部材および表示器(52)を設けて、皮膚に適用される張力の大きさを制御および表示してもよい。張力デバイスおよび方法は、ロボット毛髪移植システムに組み込むことができる。可撓性フレームを圧縮する器具(242)も開示されている。 (もっと読む)
毛包単位の追跡
物体や対象物の主要点を追跡し、同定し、分類するためのシステムおよび方法が提供される。いくつかの実施形態において、追跡は対象物の主要点および画像安定化技術の一意の特徴を用いて達成される。いくつかの態様によると、所定のマーカを用いる座標系は、マーカの位置変化および/または同定の特徴情報に基づいて規定および更新される。個々の物体またはフレーム内の特徴はまた、追跡および同定される。物体は2つの静止画像を比べること、静止画像間の物体の位置変化を特定すること、物体の移動ベクトルを算出すること、および撮像装置の位置を更新するために移動ベクトルを用いることにより追跡されてもよい。 (もっと読む)
毛髪移植法および装置
【課題】毛髪移植法およびデバイスを提供する。
【解決手段】少なくとも1つのロボットアーム202を含むロボット201と;前記ロボットアームによって搬送される毛包挿入器具であって、前記ロボットアームが、画像システムによって操作可能であって指示され、前記画像システムが、一またはそれ以上の存在する毛包の位置を認識し、および/またはユーザーに指定された植え込み位置を特定するように構成されており、これによって前記毛包挿入器具を前記身体表面に近接して選択的に配置して、少なくとも1つの毛包を植え込む自動化したプロセスを用いて操作することができる毛包挿入器具と;を具える構成とする。
(もっと読む)
頭皮を採取、保存、および移植するシステムおよび方法
生体ユニット、特に毛包ユニット(FU)を採取し、保存し、移植するシステムおよび方法である。このシステムは特に、毛髪移植処置の実行に有用である。FUは、患者にくっついているか切り取った組織片である体表面から採取され、複数の受け部を有するカートリッジに移動される。受け部は除去ツールの方へ開口しているが、受け部の近位端部を覆うカバーによってFUがカートリッジから出るのが防止される。このカバーは許容性媒体でなり、これは液体透過性および/または穿孔可能である。FUを進める方法の一つは圧力差を設けることであり、例えば受け部の近位端に吸引力をかける。シャトルサブシステムが自動化されたロボットシステム内に組み込み可能であり、あるいはシャトルサブシステムは半自動またはマニュアルの装置の一部を構成してもよい。 (もっと読む)
毛嚢ユニット移植プランナー及びその使用方法
体表面において毛嚢ユニットの美容移植計画を生成するためのシステム及び方法であって、ソフトウェア制御されるプロセッサとユーザ入力デバイスとを具えるユーザインタフェースを含み、プロセッサは制御点に基づいて提案される毛嚢移植位置及び方向を生成するように構成される。システム及び方法は更にヘア除去のための計画を生成することによって提供されている。 (もっと読む)
1 - 10 / 13
[ Back to top ]