
株式会社ケー・デー・イーにより出願された特許
1 - 3 / 3
搬送ハンド及び搬送ロボット
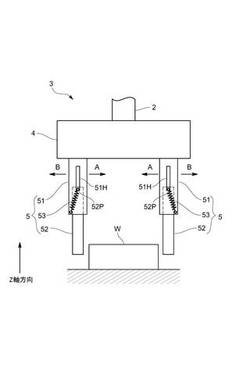
【課題】画像認識によるZ軸方向の位置情報に誤差がある場合であっても、搬送ハンド及び物品の損傷を防止するだけでなく、確実に物品を挟持することができ、搬送中に物品の姿勢を崩すことなく安全に搬送できる搬送ハンドを提供する。
【解決手段】画像認識によって得られた物品の3次元位置情報に基づいてその物品Wを搬送する搬送ロボット400に用いられ、ハンド本体4に設けられた複数の挟持体5の間隔を拡縮することによって物品Wを挟持又は解放する搬送ハンド3であって、挟持体5が収容部51と可動部52とからなり伸縮可能に構成され、物品Wを挟持した状態において、可動部52が、がたつきにより収容部51に対して傾いて収容部51の挟持方向の内面51aと接触する。一方、物品Wを開放した状態において、可動部52が、付勢部材53の弾性力により、収容部51の挟持方向の内面51aから離間する。
(もっと読む)
光学的欠陥検出装置および検出方法

【課題】透明板状体の光学的歪を測定する際に生じるノイズ成分を削減し、微小な歪量も検出することを可能とする光学的歪検出装置および検出方法を提供することを目的とする。
【解決手段】CCDラインセンサーを用いて撮像する撮像手段と、検査対象物をCCDラインセンサーの画素が配列されている方向と平行に前記検査対象物を搬送する搬送手段と、
撮像手段が撮像した画像データを処理する画像処理手段と、を備えた検査対象物の欠陥を検出する欠陥検出装置において、検査対象物が搬送される速度と画像をスキャンするタイミングとを同期させながら検査対象物を撮像して、検査対象物の同じ位置について、複数のCCD画素により複数回撮像された複数の画像データを積算して平均化することにより、画像データに含まれるノイズ成分を軽減して、信号レベルの低い欠陥まで検出する。
(もっと読む)
移動対象物用マーキング装置
【課題】搬送中の被マーキング対象物に対して、欠陥が存在する場所そのものに、高精度で、自由な形状のマーキングを施すことを可能とする移動対象物用マーキング装置を提供することを目的とする。
【解決手段】被マーキング対象物を搬送する搬送部と、搬送中の被マーキング対象物の特定箇所にマーキングを施すマーキング部と、搬送部及びマーキング部の動作を制御する動作制御部と、を備えた移動対象物用マーキング装置において、マーキング部は搬送部の搬送方向に沿って設置されたレール部と、レール部の所定の区間を搬送方向と同じ方向に移動するY方向移動部と、搬送方向に直交する方向に移動するX方向移動部と、X方向移動部に設置されてY方向とX方向の両方向に直行する方向に移動するZ方向移動部と、を有するものとし、Z方向移動部が特定区間を、被マーキング対象物と同期して移動しながら、特定箇所にマーキングを施す。
(もっと読む)
1 - 3 / 3
[ Back to top ]