
株式会社三立電機により出願された特許
1 - 1 / 1
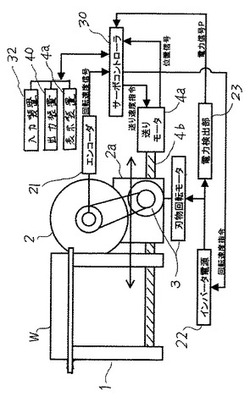
円盤刃物送り制御方法,装置およびそれを用いた切断装置
【課題】 モータの滑り、力率の変化に影響を受けないきめ細かい制御を可能とする。
【解決手段】 円盤刃物の送り制御に係わる。刃物回転モータの電力Pを計測し、刃物の回転速度fを計測する。刃物が回転中か否かを判断し、回転中なら、トルクT=P/(2×π×f)N・mの式に従い計算する。切断中か否かを判断し、切断中なら送り速度PID制御を開始し、トルクが一定となるように信号を刃物送りモータに送る。刃物回転モータが過負荷か否か判断し、過負荷でないとき、送り速度PID制御を行い、切断終了か否かを判断する。切断終了なら運転開始位置方向へ刃物を移動する。前記切断終了でないなら前記PID制御から後のいずれかの手順に戻る。前記過負荷判断で過負荷なら、送り速度を低下させ、基準時間内にトルクが正常化したか否かを判断し、正常化なら前記送り速度PID制御を行い、正常化でないなら、刃物を切断開始方向へ後退させる。
(もっと読む)
1 - 1 / 1
[ Back to top ]