
ロベルト ボッシュ ゲーエムベーハーにより出願された特許
1 - 6 / 6
ノンフォトリアリスティックな3Dマップのためにフォトリアリスティックな3Dランドマークを再利用するための方法
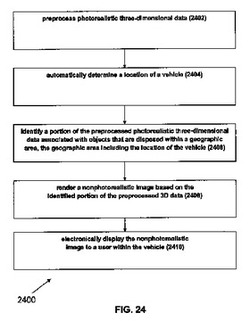
ナビゲーションマップを表示する方法は、フォトリアリスティックな三次元データをオフラインで事前に処理する工程を含む。車両の位置は自動的にオンラインで測定される。地理的な領域内に配された物体に関連する事前に処理された三次元データの一部が特定される。地理的な領域は車両の位置を含む。ノンフォトリアリスティックな画像は、事前に処理されたデータの特定された一部に基づいてレンダリングされる。ノンフォトリアリスティックな画像は車両内のユーザーに電子的に表示される。 (もっと読む)
ノンフォトリアリスティック(NPR)3Dマップを用いる3Dナビゲーション方法

ナビゲーションマップを表示する方法は、車両の位置を自動的に測定する工程を含む。車両を囲む建物に関連する三次元または二次元のデータが特定される。車両の周囲の三次元物体のノンフォトリアリスティック画像は、データに基づいてレンダリングされる。ノンフォトリアリスティック画像はユーザーに電子的に表示される。 (もっと読む)
自動車用のジェスチャーに基づいた情報およびコマンドの入力
ユーザーからの入力を受け取る方法は、ユーザーの手の届く範囲の表面を提供する工程を含む。ユーザーが触れる表面上の複数の位置が検知される。表面上の複数の触れられた位置にもっとも類似した形状を有する英数字が決定される。ユーザーは、英数字、および/または、英数字が含まれる単語を音声でまたは視覚的に知らされる。その英数字および/または単語が、決定する工程で決定されるとユーザーが望んだ英数字および/または単語であるかどうかについて、ユーザーからフィードバックが受け取られる。 (もっと読む)
位置確認のために三次元位置と二次元強度のマッピングを組み合わせるための方法と装置
マッピング方法は、第1のモバイルユニットが表面を横断する間に、二次元の特徴のマップを作成するために該第1のモバイルユニットを使用する工程を含む。該特徴の三次元位置はマッピング中に検知される。三次元マップは、特徴の三次元位置と二次元の特徴のマップとの間の関連性を含むように作成される。三次元マップは第1のモバイルユニットから第2のモバイルユニットに提供される。第2のモバイルユニットは、第2のモバイルユニットが表面を横断する間に、二次元の特徴のマップを作成するために使用される。第2のモバイルユニットによってマッピングされた二次元の特徴の三次元位置は、第2のモバイルユニット内で、三次元マップを使用することにより測定される。 (もっと読む)
車両の駐車に使用するためのカメラシステム
縦列駐車を支援するための方法は、前方および/または後方に面したカメラを備えた車両を提供する工程を含む。カメラは、少なくとも1つの空いている駐車スペース、および、他の車両によって使われている複数の駐車スペースを含む駐車区域の画像を撮影するために使用される。撮影された画像のホモグラフィが生成される。ホモグラフィは頭上の視点から駐車区域の画像を推定するために使用される。空いている駐車スペースを含む頭上画像の一部は、車両の客室内のディスプレイスクリーンに表示される。 (もっと読む)
認証情報を使用する無線通信の方法
データ通信方法は、情報のデータパケットを有する送信者ノードを提供する工程を含む。データパケットは、第1フィールドと第2フィールドの少なくとも1を備える。第2フィールドは、少なくとも1の第1フィールドの実際のコンテンツに応じたコンテンツを有する。データパケットの第2フィールドのコンテンツは、送信者ノードから受信者ノードへと送信される。受信者ノードは、データパケットの第1フィールドの実際のコンテンツを予測するために用いられる。受信者ノードは、第1フィールドの予測されたコンテンツに基づいて、データパケットの第2フィールドのコンテンツを計算するために用いられる。第1フィールドの予測されたコンテンツは、第1フィールドの実際のコンテンツと同一であることが確認される。確認工程は、第2フィールドの計算されたコンテンツを、第2フィールドの送信されたコンテンツと比較する工程を含む。 (もっと読む)
1 - 6 / 6
[ Back to top ]