
株式会社東京保機エンジニアリングにより出願された特許
1 - 1 / 1
軌道上移動体制御装置および進出方向検出装置
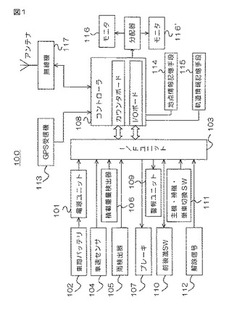
【課題】GPS観測を利用した軌道上を移動する移動体制御において、観測誤差により隣接する他の軌道に存在する移動体や停止目標による誤警報、誤ブレーキを回避する。
【解決手段】移動体制御装置100を、コントローラ108、GPS受信機113、他移動体の移動体制御装置と送受信する無線機115、ブレーキ107及び警報ユニット109を備えて構成し、コントローラを自移動体が走行している線別、線路名称等の軌道情報を記憶する手段及び他移動体又は停止目標と自移動体の軌道情報を比較する手段を備えて構成した。
(もっと読む)
1 - 1 / 1
[ Back to top ]