
ローツェ株式会社により出願された特許
11 - 20 / 33
コンテナの受渡、留置、並びに供給装置。
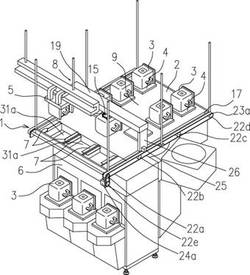
【課題】半導体製造工場内に備える天井走行車から処理装置へとコンテナを受け渡す工程において、天井走行車が処理装置による処理を天井走行車が待つことにより、工場全体のスループットが低下する不具合が生じていた。
【解決手段】天井走行車から一時コンテナを受け取って留置すると共に、留置したコンテナを重要度に応じて選択して処理装置等へ移載するために、天井走行車の下方であって処理装置の上方に天井から吊設して備えるコンテナの受渡、留置、並びに供給装置を提案する。
(もっと読む)
平板の搬送装置

【課題】従来の搬送装置では、処理装置間をライン搬送するコンベア装置と処理装置との間に、搬送装置の設置スペースを要するため、製造ライン全体が大型となる不具合が生じていた。
【解決手段】本発明の搬送装置は、コンベアの下方に備える平板移載手段によりコンベア上の平板を持ちあげ保持して、コンベアによる平板搬送方向と角度をなす方向に平板を搬送することができる構成とすることにより設置スペースを省くことができる搬送装置を提供するものである。
(もっと読む)
旋回部の配線又は配管機構
【課題】旋回部に対して電気ケーブルや配管(エアーチューブ)等のケーブルを配線する場合に、旋回部の回動動作に伴うケーブルの捻れを防止することのできる旋回部の配線又は配管機構を提供すること。
【解決手段】配管部23から立ち上がるケーブル90を固定部25により固定プーリ24に固定し、2つの湾曲ガイド部材26の間を通過するように配線する。ケーブル90はさらに固定部32により第1アーム枠体30に固定された後、さらに第1アーム枠体30内を第2アーム部の方に伸びる。第1アーム枠体30が図4(a)の位置から左右に90度旋回(回動)すると、ケーブル90が図4の(b)、(c)に示すように湾曲ガイド26の曲面27に接触して第1アームの回動方向にそれぞれ90度湾曲する。これにより、ケーブル90が、配管部23内で捩れることを防止することが可能となる。
(もっと読む)
マイクロ波プラズマ発生方法および装置
【課題】従来より反応効率が良く、ラジカルの発生量を容易に調節することができ、消費ガス量の低減を図ることができるマイクロ波プラズマ発生装置を提供する。
【解決手段】外側導体2と、外側導体の内部空間4内に配置された内側導体3と、内管5及び外管6からなる二重管構造を有し、かつ外側及び内側導体を軸方向に貫通する放電管7と、放電管における内管の外管に対する軸方向の位置を調節する調節手段を有するキャビティ1を備える。第1の流量制御バルブ18を備え、ガスボンベ14から放電管の外管内に第1のガスを供給する第1のガス供給パイプ16と、第2の流量制御バルブ19を備え、放電管の内管内に第2のガスを供給する第2のガス供給パイプ17と、マイクロ波発生源21と、マイクロ波発生源からキャビティにマイクロ波を供給するマイクロ波供給路22を備える。
(もっと読む)
基板の搬送ロボット
【課題】移載室の内容積を小さくすることができる基板の搬送ロボットを提供する。
【解決手段】搬送ロボット4aは、同心状に備える2つの駆動源15、16と、各駆動源15,16の側面に突出して備える駆動アーム17,18と、駆動アーム17,18の他端に備える2つの従動アーム19〜22と、2つで1組をなす従動アーム19〜22の先端に備えるハンド23,24と、からなるものである。この搬送ロボット4aは、各駆動源15,16を異方向、若しくは同方向に回動することで各アーム17〜22を介して第一ハンド23、第二ハンド24を進退動作、回動することができる。
(もっと読む)
処理装置
【課題】複数の移載室を並列して、連結処理室を介して精度良く連結することが容易であり、また、フットスペースが小さくてもより多くの処理室を備えることができる処理装置を提供する。
【解決手段】処理装置1aは内部中央に基板3の搬送ロボット4を有し、平面形状が四角形状である移載室2a、2bを備える。移載室2a、2bの側壁面には2つずつのプロセスチャンバ6を備える。7は一方の移載室2aから他方の移載室2bに基板3を搬送する途中で、連結処理室6bに載置する待機時間を利用して、基板3の加熱処理を行う加熱手段等を備える連結処理室である。
(もっと読む)
貯蔵装置
【課題】従来の貯蔵装置では、貯蔵装置上部に備える送風装置により保管棚の天井部と背面壁から清浄気体を流していたために、搬送ロボット等の動作により装置内に塵埃が舞って、保管棚に収納されている基板上に塵埃が付着することがあり、また保管棚に積載されたウエハ用カセットの背面壁から清浄気体を流しても乱流が発生して塵埃(パーティクル)が滞留する不具合があった。
【解決手段】本発明の貯蔵装置は、前面開口部が一定方向となるように並列して、また、移動可能である複数の基板保管棚と、保管棚が並ぶ方向に沿って移動でき、保管棚に収容される基板の受け渡しを行う搬送ロボットとを備えており、この貯蔵装置は、内部を高清浄に保つことができるものである。
(もっと読む)
リニアモータ
リニアモータの固定子部は120度の位相差を持つ電流が流されるU相、V相、W相のコイル部(10U)、(10V)、(10W)を有する。各相のコイル部は時計回りに巻回した第1のコイルと反時計回りに巻回した第2のコイルとを対として移動方向に隣接させると共に直列接続したものを移動方向に複数対配列して成る。第1のコイルと第2のコイルとの延在長を360度とした場合、V相のコイル部はU相のコイル部に対して120度だけ、W相のコイル部はV相のコイル部に対して120度だけそれぞれ移動方向に関してずらしかつ重ねて設置されている。U相、V相、W相のコイル部に磁石部(30)が移動可能に組み合わされる。磁石部の移動方向の長さはコイルにより形成される磁束の波長の1/2以下の長さとする。可動部には、コイルにより形成される磁束の1/2波長の整数倍だけ磁石部の中心から移動方向に離れた位置にホール素子(40)が取り付けられる。このホール素子の出力に基づいて各コイル部への電流の振幅あるいは位相制御を行う。  (もっと読む)
(もっと読む)
薄板状基板の搬送装置、及びその搬送制御方法
液晶表示パネル、ガラス基板等の薄板状基板を処理装置内に搬送する搬送装置に関し、大型の薄板状基板を搬送する回動アーム(16)を有する比較的大型のロボット(14)を備えた搬送装置において、2m程度の高さであっても安定して持ち上げることが可能であり、かつ回動アーム(16)を伸ばしたときの撓み量を補正した搬送が可能な搬送装置及び薄板状基板搬送システムを提供する。2つの直立支持体(12)に昇降可能に片持ち支持される水平支持台部(13)を設け、水平支持台部(13)に回動アーム(16)を有する搬送ロボット(14)を載置する。また、アームを伸ばしたときの撓み量は、水平支持台部(13)の高さを撓み量に応じて上げることにより補正する。撓み量は、水平支持台部(13)に載置されるロボット(14)の設置の角度を変化させることにより補正することも可能である。  (もっと読む)
(もっと読む)
低誘電率膜、及びその製造方法、並びそれを用いた電子部品
ポーラスダイヤモンド微粒子膜は、高耐熱性低誘電率膜として知られ、また機械的強度や熱伝導性も高く、半導体集積回路素子の多層配線用絶縁膜として期待されているが、電流−電圧特性が不十分で実用化されていない。 本発明では、ポーラスダイヤモンド微粒子膜を炭酸塩・硫酸塩が不溶または溶解度が低いバリウム、カルシウム等の金属塩水溶液、及びヘキサメチルジシラザンやトリメチルモノクロロシランなどの疎水化剤、並びにジクロロテトラメチルジシロキサンないしジメトキシテトラメチルジシロキサンのどちらか一方を含む強化剤で処理することで、絶縁破壊電圧とリーク電流とを実用基準の規定範囲内とすることができる。  (もっと読む)
(もっと読む)
11 - 20 / 33
[ Back to top ]