
ローツェ株式会社により出願された特許
21 - 30 / 33
薄板状物の変位量検出方法及び変位量修正方法
薄板状物の取出しや収納時、支持アームのエンドエフェクタ上に於ける薄板状物の適正位置とずれ位置の検出を行い、且つその修正作業を効率的に行う。検出手段(18)を支持アーム(14)上に備え、検出手段(18)はコ字状でその開放口をエンドエフェクタ(11)側となし、且つ薄板状物(2)が通過するさい干渉することなく奥行きを有する構成となしてある。  (もっと読む)
(もっと読む)
薄板支持体、並びにエンドエフェクタ及び薄板収納カセット
自重でたわむ大型液晶表示装置用ガラス基板(6)を置いた場合に、大型液晶表示装置用ガラス基板(6)にできる複数の尾根を、複数列のピン状支持部材(16、18)ごとにて支持するようにした薄板支持体である。該薄板支持体に置くことにより、たわみ量が少なくなる。薄板支持体としては、ロボットのフォーク状エンドエフェクタとカセットがある。  (もっと読む)
(もっと読む)
箱状物の供給装置、取り出し装置、棚段及び自動搬送システム
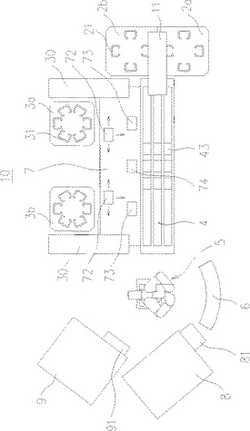
【課題】創薬、臨床検査など多数の検体の自動アッセイシステムにおけるスクリーニングピッチの短縮によるスループットの向上と事故の大幅な削減。
【解決手段】安定した待ち時間の無い搬送システムを開発した。1枚に多数の穴を有する蓋付きマイクロプレートを多数積み重ねてカセットで供給し、上から順に取り出す新規な箱状物取り出し装置と、複数のシャトル型搬送ラインと、水平回動型ダブルアームロボットとの組み合わせにより、蓋取り蓋合わせ、分注台への搬送、ピペットチップの供給、保温器や分析装置への配送・取り出し、検査済み試料マイクロプレートの返送を効率よくシステム化してスループット向上をすると共に、人手による取扱いの排除、昼夜運転、ロボットの把持失敗の皆無化を実現した。
(もっと読む)
ロボットシミュレーション装置、および、シミュレーションプログラム
障害物が配設された作業領域内で被搬送物を搬送するロボットが、作業領域内で干渉なく作業をするかどうかをシミュレーションする、ロボットシミュレーション装置で、入力部と、表示部と、計算部と、演算プログラム部、教示プログラムの出力部、及び下記の手段を備える。
(1)座標軸を有する二次元表示部
(2)前記表示部に、前記障害物と前記作業領域を描画する手段、移動するロボットを描画する手段、該ロボットにより搬送される被搬送物を描画する手段
(3)前記被搬送物体の中心点の移動径由点を指定して経由点を補間する手段
(4)前記被搬送物が前記作業領域内で移動する移動軌跡を表示する手段
(5)前記移動軌跡が前記障害物とが干渉する領域を表示する手段  (もっと読む)
(もっと読む)
搬送ロボットおよびその搬送方法

【課題】停止位置精度の不正確さと搬送アームの動作遅れを低減し、高速基板搬送を可能にした搬送ロボットとその搬送方法を提供する。
【解決手段】略中央部に第1の駆動軸14が設けられ、第1の駆動軸を回動中心にして、水平面内で回動可能に支持された第1のアーム11と、第1のアームの略両端部に第2および第3の駆動軸9a,9bが設けられ、第2および第3の駆動軸を回動中心にして、水平面内で回動可能に支持された第2および第3のアーム6a,6bと、第2および第3のアームの略先端部を回動中心にして、水平面内で回動可能に支持されたワーク支持部3a,3bとが備えられ、第2および第3の駆動軸を回動させる第2および第3の駆動源15a,15bは、第2の駆動軸9aと第1の駆動軸14との間および第3の駆動軸9bと第1の駆動軸14との間に各々設けられている
(もっと読む)
真空用クロスローラ軸受け
【課題】半導体等の製造工程において、軸受けは真空雰囲気で使用される場合があり、一般に玉軸受けが用いられていたが、構造特性から双方向の高負荷に耐えうることは困難であった。また従来のクロスローラ軸受けは、過酷な環境下では接触箇所が固着する現象や発塵等の不具合が生じる。
【解決手段】このクロスローラ軸受けは、ローラの天井部及び底部と内輪及び外輪のV溝と直接接触することがないため、接触箇所が固着する現象や発塵等の不具合が低減される。これにより、真空雰囲気中においてもクロスローラ軸受けを使用可能となった。
(もっと読む)
塗布膜、膜形成方法及び膜形成装置
【課題】膜原料となるダイヤモンド微粒子など微粒子液状組成物は粘度が低く、増粘材なしではスピン塗布機での膜形成が困難である。
【解決手段】ダイヤモンド微粒子や銀微粒子のコロイド状液状組成物を、微細且つ複数あるノズルから液滴状で塗出する方法により、低粘度でも均一膜厚に、しかも重ね塗りにより膜厚を制御して塗布することができた。乾燥させてから重ね塗りするとポーラス構造の密度を低くすることができる。ここではリーク電流、絶縁破壊電圧は十分実用に耐え、比誘電率2.8の低誘電率膜を製造することができた。
(もっと読む)
把持型搬送装置並びにこれを用いるロボット、円盤状物加工設備及び円盤状物搬送方法。
【課題】ロボットによる半導体用円盤状ウエハの搬送において、裏面真空吸着型搬送装置では一旦裏面が汚染されると汚染が伝播することから周縁把持型搬送装置が開発されているが、把持用爪がウエハ周縁と摺動摩擦して塵埃が発生するなど不具合があった。
【解決手段】搬送ハンド先端の爪と回動する2つのフィンガに取り付けられたクランプ用爪とで円盤状ウエハを把持する搬送装置であって、把持した際、クランプ爪の押圧方向が円盤のほぼ中心に向かうようにフィンガ配置を設計する。特に、フィンガを交差させて配設して長くすると、摺動摩擦部分が1/10程度に減少した。
(もっと読む)
セル及びセルの製造方法
【課題】母基板には、複数のセルが隣り合うセルの端部から所定の距離を隔てて並べられて備えるため、セルとセルの間の端切れ部分が無駄であるとともに、母基板上にセルを多く配置できず、生産効率が悪かった。さらに、超硬ホイールによる割断方法では、割断後にマイクロチップ(微少な欠けや微少な割れ)等の多くの不具合がある。
【解決手段】本発明では、母基板に隣り合うセルのシール部材を共有することで、以前より同サイズの母基板から、より多くのセルをとることができる。また、レーザ割断手段により、共有するシール部材の真上を割断するため、割断本数を減少することができ、これにより割断工程にかかる時間を短縮することができる。さらに割断部分に塑性変形領域が生じたり、マイクロチップ(微少な欠けや微少な割れ)が生じたりせず、製品歩留まりが向上する。
(もっと読む)
傾き補正装置及びそれを備えた搬送ロボット
【課題】搬送ロボットが半導体ウエハ等の基板を保持する際に生じるアームの撓みを、小さな駆動源による大きな動力で、高精度に傾きを修正できる基板の傾き補正装置を提供する。
【解決手段】減速機を備える駆動源を作動してスライド部材12を直線運動させることにより、このスライド部材12とエンドエフェクタ8及びエンドエフェクタ基台7を連結する支持部材14,15によりエンドエフェクタ8の一端を昇降させることで揺動させる基板の傾きを補正する。
(もっと読む)
21 - 30 / 33
[ Back to top ]