
サーノフ コーポレーションにより出願された特許
51 - 59 / 59
カメラ・ポーズを決定する方法および装置
(例えばコンピュータ・ビジョン・システムで使用される)6つの自由度で特徴付けられるカメラ・ポーズを決定する方法および装置が開示される。一実施形態では、カメラでキャプチャされたイメージが受領され、潜在的ポーズに関する少なくとも2つの制約が、カメラに対するイメージの既知の関係に従って実施され、それによって潜在的ポーズが、残りの2つの自由度に制限される。次いで、少なくとも1つの潜在的ポーズが、その残りの2つの自由度に従って決定される。 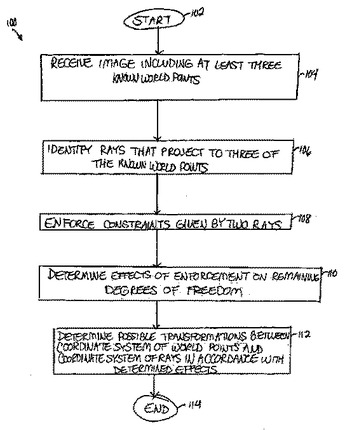 (もっと読む)
(もっと読む)
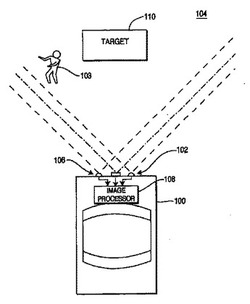
ビジュアル・オドメトリのための方法および装置
(例えば周囲の環境の中をナビゲートする)ビジュアル・オドメトリのための方法および装置が開示される。一実施形態では、周囲の環境の少なくとも一部を表すシーン・イメージのシーケンスが(例えばビデオ・カメラまたはステレオ・ヘッドから)受領される。シーン・イメージのシーケンスが(例えばビデオ処理技法に従って)処理され、周囲の環境に対するポーズの推定が導出される。この推定は、グローバル・ポジショニング・システム、あるいは慣性センサまたは機械センサなどの他のセンサからのデータでさらに補足することができる。 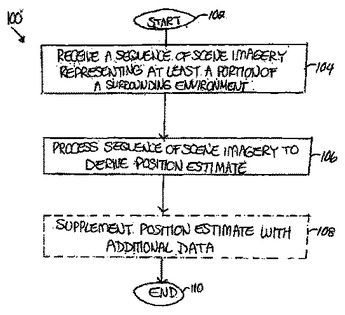 (もっと読む)
(もっと読む)
電流制御型静電放電保護を提供する方法および装置
ESD保護を提供する方法および装置。ESDクランプが、保護されるべき回路の両端子間に接続される。このクランプは、ESD事象による電流が既定の限度を超えたときにクランプをアクティブ化する、電流検出器に結合される。  (もっと読む)
(もっと読む)
電気化学電源設計及び部品
特に、多孔質コアと、当該多孔質コアを挟む2つのイオン伝導膜とを含むイオン伝導膜アセンブリが提供され、多孔質コアは、イオン伝導液を保持するようになっている。 (もっと読む)
結合部位を同定するためのコンピュータによるタンパク質探索法
高分子上の結合部位を同定するための方法が、提供される。この方法は、(a)少なくとも1つの有機フラグメント(「ORF」)に関して、パラメータBの別個の値において、そのORFを、挿入された溶媒として使用する化学ポテンシャル計算の2回以上のシミュレーテッドアニーリングを実行する工程;および(b)工程(a)からの収束解を比較して、その関連するORFが強力に結合される第一の位置を同定し、それによって、リガンド分子に結合するための候補部位を同定する工程;を包含する。好ましい一局面において、この方法は、(c)ORFに強力に結合する部位のクラスターを同定する工程、をさらに包含する。好ましい別の局面において、この方法は、(d)工程(a)および工程(b)を、2つ以上のORFのうちの各々について実行し、2つ以上の別個のORFが結合するクラスターを同定する工程、をさらに包含する。 (もっと読む)
ソース/バルク・ポンピングを使用してゲート酸化膜を保護するための方法および装置
ESD事象の間、ソース・ポンプまたはバルク・ポンプを使用してバルクおよび/またはソースの電位レベルを高くし、それにより回路をESD事象から保護する方法および装置である。この装置は、ESD事象に応答して、トランジスタの2つの端子と端子の間に形成される電圧を第2の端子の電位レベルを調整することによって制限する保護回路を備えている。
 (もっと読む)
(もっと読む)
高効率なアルカリ土類金属チオガレートベースの蛍光体
特に、2価ユウロピウムによってドーピングされ、式中、xは0.0001〜1であり、yは発光放出を提供するために十分なEu2+を定義する値であり、zはSr1−xCaxGa2S4:yEu2+のモル量に基づいて0.0001〜0.2である以下の式:Sr1−xCaxGa2S4:yEu2+・zGa2S3を有する、ストロンチウムカルシウムチオガレート系蛍光体が提供される。 (もっと読む)
立体視に基づく差し迫った衝突の検知
場面の奥行きマップを生成するため処理される画像を生成する立体カメラを有する立体視に基づく衝突回避システム。潜在的な脅威を、奥行きマップにおいて検知する。そして、検知した潜在的な脅威の大きさ、位置、および速度を推定し、推定した位置および推定した速度を用いて、検知した潜在的な脅威の軌道解析を決定する。軌道解析に基づく衝突予測を決定し、衝突が差し迫ったものであるかどうかを、衝突予測および推定された潜在的な脅威の大きさに基づいて決定する。 (もっと読む)
ローカル予測誤差に基づく映像位置合わせ

処理済みの(例えば、撮影された)映像シーケンスは、1枚以上の処理済みのフレームのセットごとに、1枚以上の元のフレームの選択されたセットから処理済みのセットへのマッピングを生成することにより、対応する元の映像シーケンスへ時間的に、空間的に、及び/又は、ヒストグラム的に位置合わせされ、(1)選択されたセットのそれぞれは前の処理済みのセットに対応する選択されたセットに依存し、(2)各マッピングは元のセットと対応する処理済みのセットとの間のローカル予測誤差を最小化し、(3)処理済みの映像シーケンス全体に対する累積予測誤差は最小化される。 (もっと読む)
51 - 59 / 59
[ Back to top ]