
Fターム[2B034BG02]の内容
土作業機(その他) (8,058) | 制御装置又は報知装置 (134) | センサの構成、配置又は取付け (42)
Fターム[2B034BG02]に分類される特許
41 - 42 / 42
走行機に連結される作業機
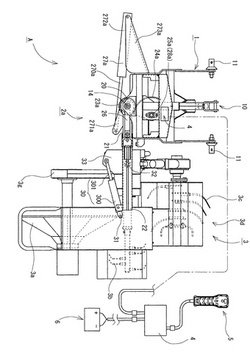
【課題】 水田等の圃場の作業残隅部の作業処理は、その作業がトラクタを反転させる等の困難な作業が多かった。また、畦等の被作業面が直線でない場合や、草や樹木などの異物がある場合正確に作業が行えない課題があった。
【解決手段】 作業機Aは、装着フレーム1等に設ける回動支点14を中心に回動可能かつ伸縮可能な回動部2と、回動部2に設けた作業部回動支点32を中心に回動可能な作業部3と、回動部2の回動変位量及び伸縮量と作業部3の回動変位量とを制御する制御部4と、制御部4を操作可能な操作部5を有し、作業部3は、走行機Bを走行させた状態で走行機Bの進行方向にほぼ平行な面を作業面34aとして作動することが可能であり、かつ走行機Bの後方に位置させた状態で走行機Bの進行方向とほぼ直交する面を作業面34bとして作動することが可能である。
(もっと読む)
農作業機

【課題】畦形成手段を所望の作業位置に自動的に停止できる農作業機を提供する。
【解決手段】農作業機1は、畦形成作業をする畦形成手段6と、畦形成手段6を移動させるシリンダ21,26とを備える。農作業機1は、畦形成手段6および畦間の距離を検知する距離検知手段16を備え、この距離検知手段16は畦の肩部に接触して検知信号を出力する接触センサ17である。制御手段は、距離検知手段16による検知に基づいて、シリンダ21,26を制御して畦形成手段6を作業位置に停止させる。
(もっと読む)
41 - 42 / 42
[ Back to top ]