
Fターム[2B043EA06]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 指標に対する車両の位置 (22)
Fターム[2B043EA06]に分類される特許
21 - 22 / 22
圃場作業車両
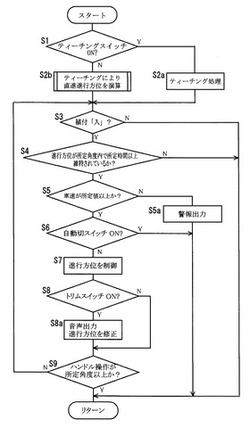
【課題】簡易な構成で信頼性の高い制御部により自律直進操舵制御の不安定化を回避して異常走行を確実に防止することができる圃場作業車両を提供する。
【解決手段】圃場作業車両1は、機体方向を示す機体方位情報9に基づき、別途設定の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部21を備えて構成され、上記制御部21には、方位偏差の低減に適する走行速度を基準速度として別途設定し、機体の走行速度情報25に基づいて同走行速度が上記基準速度に満たない範囲について上記自律直進操舵制御を強制解除するものである。
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 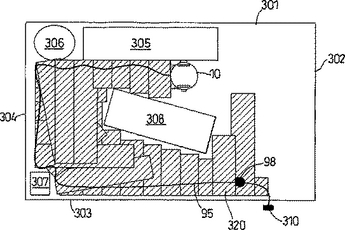 (もっと読む)
(もっと読む)
21 - 22 / 22
[ Back to top ]