
Fターム[2B304PA04]の内容
Fターム[2B304PA04]に分類される特許
1 - 5 / 5
移動農機
【課題】使用頻度の高いエンジンの高回転域で、安定した作業速度を確保して作業の高能率化を図ることができるようにした移動農機を提供しようとするものである。
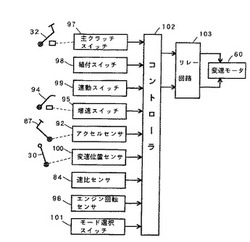
【解決手段】エンジン2の出力回転数を変更するアクセルペダル87と、前記アクセルペダル87の操作位置を検出するアクセルセンサ92を備え、前記アクセルセンサ92の出力に基づき、アクセルセンサ92の出力に対応するエンジン2回転数が、エンジン2の出力回転数として得られるように、前記出力回転数を制御するように構成する移動農機において、前記出力回転数の上限を設定する上限設定手段30,99,100を備え、前記アクセルセンサ92の出力に対応するエンジン2回転数が、前記上限設定手段30,99,100により設定した上限回転数よりも高い場合には、前記上限回転数が前記出力回転数として得られように、前記出力回転数を制御するように構成したものである。
(もっと読む)
耕起作業機の耕深制御構造

【課題】エンジン回転数を耕深制御での指標とせずに、耕起装置の耕起深さを設定手段により設定した制御目標耕深に維持できるようにする。
【解決手段】走行車体1に対して耕起装置3を昇降駆動する駆動手段41、耕起装置3の制御目標耕深を設定する設定手段56、耕起装置3の対車体高さを検出する検出手段54、検出手段54の出力が設定手段56の出力に対応するよう駆動手段41の作動を制御する制御手段25A、エンジン6の燃料噴射量を演算する演算手段62、及び、検出手段54の出力が設定手段56の出力に対応したときの演算手段62の出力を制御基準値として記憶する記憶手段25Cを備え、制御手段25Aが、制御基準値と演算手段62の出力に基づいて制御目標耕深を補正し、検出手段54の出力が補正後の制御目標耕深に対応するよう駆動手段41の作動を制御する。
(もっと読む)
芝刈機
【課題】オペレータの運転操作性又は草刈り作業操作性を向上できるようにした芝刈機を提供するものである。
【解決手段】走行機体1に搭載されたモア装置16と、モア装置16によって刈取られた草89を収集する集草体30と、走行機体1に集草体30を昇降可能に支持するリフト機構31とを備え、リフト機構31によって集草体30を持上げて集草体30内の刈草を排出するように構成する一方、走行機体1に搭載されたエンジン9を停止するエンジン停止機構151と、モア装置16を駆動又は停止操作するPTO操作体18とを備えてなる芝刈機において、モア装置16を駆動するためのPTO操作体18の操作を検出するPTO入り検出手段150,164と、走行機体1の走行部6を制動状態に維持するための駐車ブレーキ153の入り作動を検出する駐車ブレーキ検出手段154,166とを備え、駐車ブレーキ153を入り作動中、PTO操作体18のモア装置16駆動操作によって、エンジン停止機構151を作動させるように構成したものである
(もっと読む)
乗用型芝刈り機
【課題】 モーア昇降用のペダルの配置を工夫することによって乗用型芝刈り機の操作性を向上させる芝刈り機を提供する。
【解決手段】 乗用走行機体に昇降リンク機構13を介してモーア30を昇降可能に連結した乗用型芝刈り機において、昇降リンク機構13を上昇作動させる上昇ペダル18と下降作動させる下降ペダル19とを備え、上昇ペダル18の上昇踏み面18aと下降ペダル19の下降踏み面19aとを乗用走行機体の運転部10の左右方向に並べて配置した。
(もっと読む)
農作業機連結装置
【課題】農作業機の持ち上げ時の回動を容易に行わせようとする。
【解決手段】作業機側のヒッチ(48)に支点軸(50)を設けこの支点軸(50)回りに回動自在にアーム(49)を設け、このアーム(49)には農作業機(46)を保持するホルダ(51)を設けると共に上記ヒッチ(48)に対して作業姿勢と非作業姿勢に固定する手段(6)を設け、このアーム(49)に支点軸(50)軸心から離れた位置から略水平状に延出する中継ロッド(52)を設け、この中継ロッド(52)に踏み込みペダル(55)を連結してなる。
(もっと読む)
1 - 5 / 5
[ Back to top ]