
Fターム[2B396RA03]の内容
Fターム[2B396RA03]に分類される特許
1 - 6 / 6
コンバイン
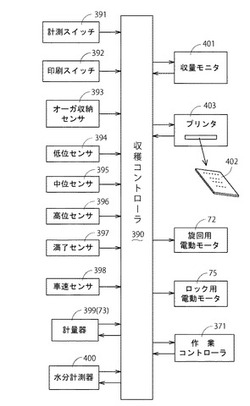
【課題】走行機体1の傾斜姿勢が自動的に修正されることを利用して、穀物タン7ク内の穀粒の質量を高精度で計測でき、穀粒の質量の計測誤差を簡単に低減できるようにしたコンバインを提供するものである。
【解決手段】刈取装置3及び脱穀装置5及び穀物タンク7を装設した走行機体1と、走行機体1の左右方向又は前後方向の傾斜姿勢を修正する傾斜姿勢アクチュエータとしての車高調節油圧シリンダ38又は前後傾斜用油圧シリンダ177と、穀物タンク7の質量を計測する計量手段としての計量器399を備えるコンバインにおいて、走行機体1の左右方向又は前後方向の傾斜姿勢が自動的に修正されることによって、走行機体1が水平姿勢に維持されているときに、計量器399によって穀物タンク7の質量が計測されるように構成したことを特徴とする。
(もっと読む)
コンバイン

【課題】走行機体の傾動制御を穀粒排出作業に協調させて行う際に、走行機体を安定させた状態で穀粒排出作業を行うことができるコンバインを提供することを課題とする。
【解決手段】排出オーガ11を支持する走行機体2と、走行部4L,4Rと、傾斜変更可能に走行機体2を傾動させるアクチュエータ7L,7Rと、水平方向に対して走行機体2の傾斜角を検出する傾斜角検出手段49と、制御部32とを備え、上記制御部32が水平方向に対して走行機体2の傾斜角を所定の角度に維持する傾斜自動制御を行うコンバインにおいて、制御部32が傾斜自動制御中に条件を満たさなくなった場合には走行機体2を走行部4L,4Rに対して略平行状態に復帰させる平行復帰制御を行い、条件を満たしている場合でも、水平回動位置が収納位置であることが検出されている排出オーガ11への上昇指令に起因して傾斜自動制御を停止するとともに平行復帰制御を行う。
(もっと読む)
コンバイン
【課題】走行機体に対して左右の走行装置をそれぞれ独立して昇降させる左右一対の走行部昇降装置を備え、前記走行機体の左右方向の傾斜調整を行い得るコンバインにおいて、排出オーガによる排出作業時に排出不良を防止し、安定した排出作業を行うことができるコンバインを提供する。
【解決手段】自動制御モード実行時且つオーガ検出センサ492からの信号に基づき排出オーガ7が格納位置から外れたと判断された場合、制御装置400により、左右一対の走行装置10の少なくとも何れか一方が走行機体2に対して最接近する(最下限位置となる)まで左右一対の走行部昇降装置がともに近接方向に作動する(車高を下げる)。そして、左右一対の走行装置10の少なくとも何れか一方が走行機体2に対して最接近した状態で、傾斜検出センサ450により検出される傾斜角度に応じて、制御装置400が走行機体2を水平角に自動制御する下限水平制御が行われる。
(もっと読む)
コンバイン
【課題】グレンタンクに収穫穀物が貯留され、直進性が低下した場合に、走行方向を修正する操向制御手段を具備するコンバインを提供する。
【解決手段】走行機体の左右どちらか一方にグレンタンク15を具備するコンバインにおいて、作業時に、グレンタンク15の重量を検知して、その重量に応じて操向手段を駆動して、直進するように操向制御手段150を具備した。また、前記操向制御手段は、左右のクローラの回転数を変更することにより行う。
(もっと読む)
コンバインにおける穀粒排出用オーガの無線式操作装置
【課題】 穀粒の排出位置の調節を簡単な操作で行うことができるコンバインにおける穀粒排出用オーガの無線式操作装置を提供すること。
【解決手段】 コンバイン本体に、走行状態と走行停止状態とに切換える走行状態切換手段、その走行状態切換手段を操作する走行用アクチュエータ、及び、その走行用アクチュエータの作動を制御する走行制御手段が備えられ、無線式指令手段42が、走行指令及び走行停止指令を指令する走行指令手段51,52を備えて、この走行指令手段による走行指令及び走行停止指令を無線信号にて指令するように構成され、走行制御手段が、無線式指令手段が指令する走行指令及び走行停止指令に基づいて、走行用アクチュエータの作動を制御するように構成されているコンバインにおける穀粒排出用オーガの無線式操作装置。
(もっと読む)
コンバインの制御装置
【課題】穀粒排出の緊急停止を要する場合に、ロス時間を最小限度に抑えて停止操作することができるコンバインの制御装置を提供する。
【解決手段】コンバインの制御装置は、走行伝動装置による機体走行を運転台fで足踏み操作することにより停車制動するための駐車ペダルスイッチ13と、グレンタンクの穀粒排出装置1の動作を運転台fで操作するための穀粒排出操作部と、この穀粒排出操作部の操作信号を受けて穀粒排出装置1の動作を制御する制御部11とを備えて構成され、上記制御部11は、駐車ペダルスイッチ13の操作信号により穀粒排出装置1の排出動作を強制停止するべく制御する。
(もっと読む)
1 - 6 / 6
[ Back to top ]