
Fターム[2B396RA06]の内容
Fターム[2B396RA06]の下位に属するFターム
脱穀機内の搬送装置
穀粒タンク内の搬送装置 (5)
タンクへの搬送装置(揚穀筒) (3)
機外への搬送装置(排出筒) (154)
Fターム[2B396RA06]に分類される特許
1 - 3 / 3
コンバインのクラッチ操作装置
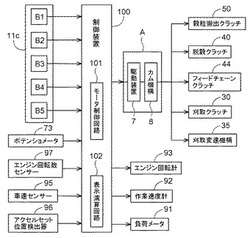
【課題】刈取系のクラッチと穀粒搬出用クラッチとを備えるコンバインにおける各クラッチの入り切り制御を誤操作少なく、かつ迅速に行えるようにする。
【解決手段】刈取クラッチ30が入り状態であると前記穀粒搬出用クラッチ50の入りを阻止し、前記穀粒搬出用クラッチ50の入り状態で前記刈取クラッチ30が入り操作されると、これに伴って前記穀粒搬出用クラッチ50を切り状態に切換操作する制御手段101を備えた。
(もっと読む)
コンバインにおける穀粒排出用オーガの操作装置

【課題】 移動目的に適した速度で穀粒排出用オーガを移動させることができる使い勝手のよいコンバインにおける穀粒排出用オーガの操作装置を提供すること。
【解決手段】 制御手段が、端末側指令手段にて指令される指令情報BU,BD,BR,BLに基づいて昇降用アクチュエータ及び旋回用アクチュエータの作動を制御する場合の方が、機体側指令手段にて指令される指令情報CU,CD,CR,CLに基づいて昇降用アクチュエータ及び旋回用アクチュエータの作動を制御する場合よりも低速で穀粒排出用オーガが昇降作動及び旋回作動するように、昇降用アクチュエータ及び旋回用アクチュエータの作動を制御するように構成されているコンバインにおける穀粒排出用オーガの操作装置を構成した。
(もっと読む)
コンバインにおける穀粒排出用オーガの操作装置
【課題】 穀粒排出用の対象箇所の近くにいる作業者にて指令される場合において、穀粒排出用オーガの移動や排出状態の切り換え等の操作を良好に行うことが可能となるコンバインにおける穀粒排出用オーガの操作装置を提供する。
【解決手段】 機体に対して旋回操作自在、昇降操作自在に、且つ、穀粒排出状態と排出停止状態とに切り換え自在に構成された穀粒排出用オーガ9の旋回操作、昇降操作、及び、穀粒排出状態と排出停止状態との切り換え操作を指令する手動操作式の指令手段が、無線式の指令手段42として構成され、この無線式の指令手段42から無線送信された前記無線信号を受信して制御手段Hに伝えるための受信アンテナ57が、穀粒排出用オーガ9の穀粒排出口10の近傍に備えられている。
(もっと読む)
1 - 3 / 3
[ Back to top ]