
Fターム[2C480EA10]の内容
プリンタの字間スペース及びラインスペース (4,828) | モータ制御 (691) | アンダーシュート、オーバーシュートの防止 (12)
Fターム[2C480EA10]に分類される特許
1 - 12 / 12
記録装置および記録方法
【課題】高品位記録が可能な記録装置。
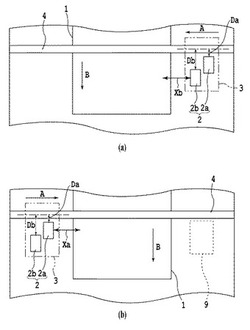
【解決手段】複数の記録ヘッドを搭載したキャリッジとキャリッジを案内支持するガイド部材とを備え、キャリッジをガイド部材に沿って往復走査させ記録媒体に記録を行う記録装置であって、複数の記録ヘッドは、キャリッジがガイド部材の第1端側にある場合はガイド部材から遠い位置にある第1記録ヘッドが近い位置にある第2記録ヘッドよりも記録媒体の搬送路側にあり、キャリッジがガイド部材の第2端側にある場合はその反対であるように第1、第2記録ヘッドが配置され、キャリッジを第1端側から第2端側へ走査して記録する際のキャリッジの走査開始位置から記録開始位置までの距離を第2端側から第1端側へ走査して記録する際の該距離よりも大きく設定する設定手段と、前記設定手段によりキャリッジを制御して記録を行う記録制御手段と、を備えた記録装置。
(もっと読む)
駆動制御装置、駆動制御方法及び記録装置

【課題】モーターを用いる変位部材の変位速度の制御性を向上させることができる駆動制御装置、駆動制御方法及び記録装置を提供する。
【解決手段】キャリッジ17を主走査方向に移動させるための駆動制御装置は、B方向に回転した場合にキャリッジ17を主走査方向における一方側に移動させるための第1駆動力を発生する第1CRモーター20と、A方向に回転した場合にキャリッジ17を主走査方向における他方側に移動させるための第2駆動力を発生する第2CRモーター22と、キャリッジ17に伝達される第1駆動力及び第2駆動力の大きさを調整すべく各CRモーター20,22を制御する制御部51とを備えている。
(もっと読む)
キャリッジの制御方法
【課題】短時間で滑らかに加速する初期制御量を常に最適な値に設定し、良好な加速制御を行うことが可能なキャリッジの制御方法を提供する。
【解決手段】インクを吐出するインクジェットヘッド21を備えたキャリッジ22を動作させるためのキャリッジモーター25の駆動電流を、キャリッジモーター25の実回転速度Vcと目標回転速度Vtとの速度偏差ΔVに応じてPID制御する方法において、キャリッジ22の動作を開始するためにキャリッジモーター25の駆動を開始する時のPID制御における初期積分出力値Istrを、前回にキャリッジ22を動作させた時のPID制御量である前回制御出力値PIDpreに基づいて決定する。
(もっと読む)
可動部材の駆動制御装置および駆動制御方法ならびに印刷装置
【課題】アクティブダンパのキャリブレーションに要する時間を短縮することのできる可
動部材の駆動制御装置および駆動制御方法を提供する。
【解決手段】可動部材を駆動する駆動手段と、可動部材の位置を検出する位置検出手段と
、可動部材の移動方向における振動を相殺するためのパラメータを利用して、位置検出手
段の検出した位置に応じて駆動手段の駆動状態を制御する駆動状態制御手段と、可動部材
の振動を相殺するための新たなパラメータを検出してその内容を更新するパラメータ更新
手段とを有し、駆動手段が可動部材を駆動する速度として複数の速度モードが設けられ、
パラメータ更新手段は、複数の速度モードに応じてパラメータの検出およびパラメータの
更新を行う。
(もっと読む)
可動部材の駆動制御装置および駆動制御方法ならびに印刷装置
【課題】 アクティブダンパのキャリブレーションを頻繁に行うことのない可動部材の駆
動制御装置および駆動制御方法を提供する。
【解決手段】
可動部材を駆動する駆動手段と、可動部材の位置を検出する位置検出手段と、可動部材
の移動方向における振動を相殺するためのパラメータを利用して、位置検出手段の検出し
た可動部材の位置に応じて駆動手段の駆動を制御する駆動制御手段と、この駆動制御手段
の制御により可動部材の振動が軽減されているかどうかを判断する判断手段と、可動部材
の振動を相殺するための新たなパラメータを求めてその値を更新するパラメータ更新手段
とを有し、パラメータ更新手段は、可動部材の駆動に障害が発生した可能性または障害が
発生する要因があると判断され、かつ判断手段が可動部材の振動が軽減されていないと判
断した場合には、その後の可能なタイミングでパラメータの更新を実行する。
(もっと読む)
サーボ制御装置、方法及びプログラム、並びにインクジェット記録装置
【課題】オーバシュート現象の発生を抑えるとともに、CPU負荷を低減したサーボ制御装置、方法及びプログラムを提供する。
【解決手段】プリンタヘッド404と、これを駆動するDCモータ6004と、プリンタヘッド404の位置及びを速度を検出する検出手段と、プリンタヘッド404を駆動する速度の目標値である目標速度プロファイルを生成し、DCモータ6004による駆動力の指示値である駆動出力値を演算するCPU401とを有し、駆動出力値をデジタル演算によって特定の制御周期で離散的に演算して、少なくとも被駆動体の速度を速度目標値に近づけるように制御するサーボ制御装置であって、デジタル演算を行う制御周期が可変である。
(もっと読む)
キャリッジ制御装置、キャリッジ制御方法、キャリッジ制御プログラム及びプリンタ
【課題】印刷装置におけるキャリッジ速度の変動を抑制することができるキャリッジ制御装置を提供する。
【解決手段】キャリッジの駆動速度パターンデータを記憶する速度パターン記憶手段と、速度パターン記憶手段に記憶されている駆動速度パターンデータを読み出して、該駆動速度パターンデータに基づいて、キャリッジの駆動速度を制御する駆動制御手段と、駆動制御手段によりキャリッジの駆動制御が行われた場合のキャリッジの移動速度を検出して、キャリッジの移動速度変化データを取得する速度変化取得手段と、キャリッジの駆動制御が行われた場合に用いられた駆動速度パターンデータと、速度変化取得手段により取得されたキャリッジの移動速度変化データとの差に基づいて、新たな駆動速度パターンデータを生成して、該新たな駆動速度パターンデータを速度パターン記憶手段に書き込むことにより駆動速度パターンデータを更新する更新手段とを備えた。
(もっと読む)
画像形成装置
【課題】加速終了後の或る一定時間モータ出力の上限値と下限値を制限した限界領域を設定し、新規部品を追加することなく、なおかつ部品の精度を要求することなく、キャリッジの振動を防止し、ジャンピングによる速度変動を抑える画像形成装置を提供する。
【解決手段】キャリッジ1と、モータ3と、モータプーリ3aと、歯付きタイミングベルト2と、前記モータ3を動作させる加速制御手段10と、前記モータ3を制御するキャリッジ速度制御手段11と、副走査部7を搭載する画像形成装置において、印字モード毎に所定の速度に到達する時間と前記モータの最大出力と最低出力を制限する限界領域を表情報−1として記憶する記憶手段13を有し、前記モータ3の出力を、前記キャリッジ1が所定の速度に到達する時間を経過後、一定時間の間、前記表情報−1に記録してある前記限界領域で制限する。
(もっと読む)
印刷装置のシャトル制御方法
【課題】 ハンマバンク反転区間の加速度を高く維持しつつ、等速区間前半部の速度超過を防ぎ、必要最小限の駆動電流で安定したシャトルの高速往復運動を行い、印刷速度を向上させることを課題とする。
【解決手段】 複数個の印字素子を搭載したハンマバンクと、少なくともマグネットとコイルとを有し、該コイルへ駆動電流を通電する事により前記ハンマバンクを往復移動させると共に、前記ハンマバンクの振幅の両端近傍で前記ハンマバンクの往復移動の反転を付勢する反転付勢手段を備えたリニアモータ方式のシャトル機構を有する印刷装置において、反転駆動用コイルに減速方向の推力が発生する駆動電流を加速方向に推力が発生する駆動電流より多く通電する事を特徴とする。
(もっと読む)
モータ駆動制御装置及び画像形成装置
【課題】 線形の立ち上げ速度プロファイルに従ってモータをサーボ制御するために急激な加速度を伴う立ち上げ制御が行なわれて被記録媒体を停止位置精度が低下し、騒音が発生する。
【解決手段】 速度プロファイル格納部101に格納した速度プロファイルと、加速度係数格納部102に格納した三角関数であるSin係数を保持したテーブル値Tsinと、印刷モードに応じて加速度を変更するための立ち上げ係数βとに基づいて得られる非線形の立ち上げ速度プロファイル(目標速度プロファイル)に基づいて副走査モータ31を駆動制御することで、急激な加速度を低減する。
(もっと読む)
キャリッジの駆動制御方法及び駆動制御プログラム並びに電子装置、記録装置及び液体噴射装置
【課題】 コギングやモータプーリの偏心等による振動を、吸振機構を設けること無しに吸収することができるキャリッジの駆動制御方法及びその制御方法で制御されるキャリッジを備えた電子装置と液体噴射装置を提供すること。
【解決手段】キャリッジ153で発生する振動の周期、位相及び振幅を検出し、前記周期及び前記振幅と同一の周期と振幅であって、前記位相から所定値ずらした位相の信号SVAに基づいて、キャリッジ153の速度を制御する。これにより、主走査方向の記録ピッチにむらが生じる原因となっている、コギングやモータプーリ157の偏心等による振動を、複雑な吸振機構を設けること無しに減衰させること、主走査方向の記録ピッチに生じるむらを排除することができる。
(もっと読む)
モータ制御方法およびモータ制御装置
【課題】移動速度の検出を離散的なタイミングで行う場合であっても、瞬時的な外乱の影響を抑制できると共に、不適切なモータ制御となるのを抑制できるモータ制御方法およびモータ制御装置を提供する。
【解決手段】キャリッジ制御装置1では、フィードバック演算処理部70が、PID制御で算出した比例制御値,積分制御値および微分制御値を用いて回転速度制御信号S3を設定するにあたり、微分量反映時間の経過後は、出力補正処理部19が微分制御値を0に補正している。これにより、検出速度と実際の移動速度とに差が生じた場合でも、回転速度制御信号S3が、実際の運動速度に適した値から大幅に逸脱した値に設定されるのを防止でき、オーバーシュートなどの不適切なモータ制御が行われるのを防止できる。
(もっと読む)
1 - 12 / 12
[ Back to top ]