
Fターム[2E184HH16]の内容
Fターム[2E184HH16]に分類される特許
1 - 10 / 10
視覚無しでの方向誘導システム
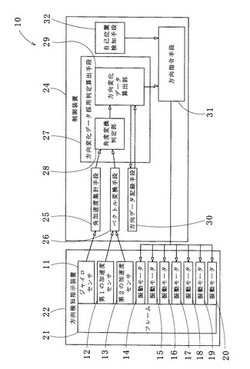
【課題】人の頭部が向く方向との差異を抑制した方向を検知し、その方向を基に誘導する方向を人が視覚以外の感覚で認識できる態様で伝えて、人を誘導する視覚無しでの方向誘導システムを提供する。
【解決手段】視覚無しでの方向誘導システム10は、(1)フレーム21、ジャイロセンサ11、第1、第2の加速度センサ12、13、並びに複数の方向指示手段14〜20を有する方向検知指示装置22と、(2)第1、第2の加速度センサ12、13で測定した出力データからベクトル変換手段26で算出したベクトルデータを基に、ジャイロセンサ11の出力を方向変化データとして採用するか否かの判定をし、方向変化データを算出する方向変化データ採用判定算出手段27と、方向変化データにより更新される方向データを記録する方向データ記録手段30と、方向指示手段14〜20のいずれか1を作動させる方向指令手段31とを有する制御装置24とからなる。
(もっと読む)
火災時危険度評価装置、移動経路選択装置、火災時危険度評価プログラム及び移動経路選択プログラム

【課題】火災時の建物内の任意の区画の危険度の正確な評価を可能とする。
【解決手段】建物内に設けられた防火区画のうち、火災時に火が伝わる可能性がある全ての防火区画の組み合わせについて、境界に防火設備が有る場合は当該防火設備が正常に機能しているか否かに応じて、境界に防火設備が無い場合は防火区画の形成材料に応じて、火災時に延焼する確率を隣接延焼リスク値として設定してテーブルに登録し、隣接煙拡大リスクも同様に設定登録する(56〜74)ことを、延焼や煙拡大の可能性がある全ての防火区画の組み合わせについて各々行う。火災時には、隣接延焼リスク値及び隣接煙拡大リスク値を用い、火元の防火区画から評価対象の防火区画に至る個々の延焼経路毎の延焼リスク値及び個々の煙到達経路毎の煙到達リスク値を各々演算して評価対象の防火区画の危険度を評価し、人が存在している防火区画からの避難経路を選択する。
(もっと読む)
閉所作業監視救出装置
【課題】事故を発見し通報し救出することを一連として行う閉所作業監視救出装置を提供する。
【解決手段】閉所作業監視救出装置は、閉所内で作業する内部作業者が身に付けて携行する心電器と、上記閉所内の雰囲気を検知する検知器と、上記内部作業者の体に一端が固定された巻取りロープと、上記閉所の出入口付近に配置されるとともに上記巻取りロープを巻き取る巻上げウィンチと、上記心電器が上記内部作業者の事故を検知したときまたは上記閉所内の雰囲気が異常のとき上記巻上げウィンチを作動して上記内部作業者を閉所の出入口まで引き上げる制御装置と、を備える。
(もっと読む)
避難支援装置および避難支援方法
【課題】地震の主要動が到達する前に避難を支援することができる避難支援装置および避難支援方法を提供する。
【解決手段】ホームサーバ24は、地震管理センターから地震情報を受信し、避難が必要な場合、アラーム21にアラーム音を発生させる。そして、一定時間経過後に監視カメラ22により人体が検知された場合、振動装置23を駆動して、地震の主要動が到達する前に、避難支援装置20が設置されている建物内に残っている者に避難すべきことを認識させる。
(もっと読む)
避難者行動予測装置および避難者行動予測方法
【課題】人の行動をより高速に推測すること。
【解決手段】複数の経路の構造を収集する経路構造収集部42と、複数の経路で発生する事象の状態を収集する事象収集部45と、構造と状態とに基づいて事象の進展を算出する事象進展シミュレーション部46と、構造と進展とに基づいて複数の経路にいる複数の人のうちのn人を代表する複数の代表行動者の移動を算出し、代表行動者の移動に基づいて人の移動を算出する人流動シミュレーション部47とを備えている。代表行動者の移動速度は、人の移動速度に等しく、代表行動者の大きさは、人の大きさに等しく、代表行動者が互いに保つ代表者間距離は、人が互いに保つ人間距離より大きい。このとき、nの値は、2以上である。
(もっと読む)
避難誘導システムと避難誘導標識
【課題】地下街や商業ビルなど多数の施設利用者が自由に出入りする施設において、災害情報と、災害情報との関係で決定されるべき最適の避難ルートとを報知して、不特定多数の施設利用者を安全にしかも適確に非常口まで避難誘導できるシステムを提供する。
【解決手段】施設内の多数個所に設置される避難誘導標識1に、2次元コード等の固有情報記録媒体12を設けておき、災害発生時に施設利用者が最寄りの避難誘導標識1の2次元コード12を携帯電話4で読み込むことにより、施設利用者の現在位置を避難管理サーバー3に自動送信できるようにする。位置情報を受け取った避難管理サーバー3は、報知機2から送られた災害発生場所情報と、個々の避難誘導標識1の位置情報と、施設に設けた非常口の位置情報などから最適の避難ルートを判定し、受信した送信手段4に対して災害発生場所や災害内容などの災害情報と、最適の避難ルート情報とを返信する。
(もっと読む)
センサネットワークロボットシステム
【課題】移動型センサネットワークを形成する手段を備えた小型の自律運動可能なロボットを多数現場に散布し、近距離無線通信を利用して効率良い人命捜索や、救助ルートや避難ルートなどのための有益情報の抽出・提示等を行うことができるようにする。
【解決手段】災害救援に際しては、カメラ15を初め各種のセンサ11を備えたセンサネットワークロボット1を、カメラ51や通信部54を備えた無人ヘリコプター2からパルシュートで多数散布し、着地したロボットは各々自律走行して周囲の情報を収集する。このロボットは自動連結機能を備え、必要に応じて多数連結し、一体化したロボットとしてがれき上を自律走行し、情報を収集する。ロボットの収集した情報は、無人ヘリコプター2を介し、或いは直接基地3に集められ、待避ルートの割り出し61、救助ルートの割り出し62等を行い、要救助者等に提示する。同様の機能はロボットに備えてもよい。
(もっと読む)
低層住宅用飛降、受止型緊急避難装置。
【課題】低層住宅において火災時に、二、三階より避難者が飛び降りて、捻挫、骨接をするなど、また、最悪の場合には死亡にいたる事態もある。避難者が安全、かつ迅速に緊急避難を出来るようにする事が課題である。
【解決手段】本体フレームに受止部をスプリングで取付、安全用エアーバツク、前部キャスター付脚と共に床下に格納する。緊急時には、二、三階のヘルメット掛け兼用スイツチ10よりヘルメツトを外すとスイツチが入り、モーターが作動し、本体を外に押出す。又、本体押出中、電動コンプレツサー12のエアータンクにある安全弁のピンを引抜くため、エアーがエアーホース13を通り、エアーバツクを膨らまし、安全を確保する。ベランダの緊急避難用扉19は本体の自動配置が完了する時点で、安全ロツクピンスイツチ17が入り、安全ロツク装置18のロツクが解除され、緊急避難用扉を開けられる。
(もっと読む)
建物から、安全で簡単に避難出来る、避難装置。
【課題】 地震、火災等で、建物内から避難するとき、縄ハシゴ等での避難は、怖くて危険で、困難なことです。老人、病人、女子、子供、高所恐怖症等の人達は、避難出来ません。
【解決手段】 建物内に、クレーンを設置して、避難器具に、人間を乗せて、クレーンで吊り上げ、リモコンスイッチの操作や、全自動操作によって、安全で簡単に、避難出来る、避難装置です。
(もっと読む)
高層ビルでの消火活動、救助および建設のための機材
高層ビル(2)の外側に取り付けられたレール(1)上を移動するためのエレベータシステムが開示される。レールは、H字形を有し、エレベータを昇降させるためにレールのチャネル内に設けられたケーブルに接続されたトロリー(37、38)を有する。モータ(7)は、トロリーに接続されたケーブル(35,36)を有するスプール(9,10)を回転させる。1基のエレベータは、ビル上のいずれの位置にも届くように取り付けられた伸縮自在アーム(18)を有する。伸縮自在アームに取り付けられたプラットフォームまたはキャビン(20)が、建設中のビルへ建設材料を送ることができ、その後、窓掃除等のビルメンテナンスのために使用することができる。伸縮自在アームは、たとえば、火事になっている高層ビルに閉じ込められた人を救助するため、または、消防士およびホースまたは消火活動設備を火災の近くに配置するため、等の異なる機能のための様々な付属物を有してもよい。 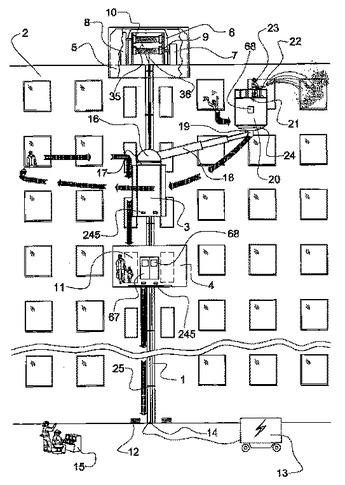 (もっと読む)
(もっと読む)
1 - 10 / 10
[ Back to top ]