
Fターム[2E189FA01]の内容
Fターム[2E189FA01]に分類される特許
1 - 12 / 12
ヘッド接続用継手及び継手固定構造
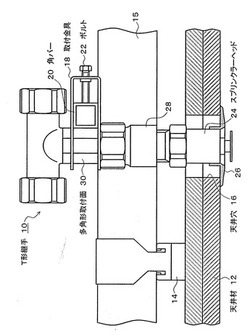
【課題】天井下地材に支持された角バーに対する継手の固定強度を高めると共に多方向となる配管方向を必要に応じて選択可能として配管レイアウトの自由度を高めるヘッド接続用継手を提供する。
【解決手段】ヘッド接続用継手となるT形継手10は、ヘッド接続口を設けた立下り胴部の外周に多角形取付面30を形成する。取付金具18は横長のコ字形に形成され、上下に位置する横辺部位にT形継手10の多角形取付面30に係合する多角形係合穴を形成し、横辺部位を繋ぐ縦辺部位のねじ穴にボルト22を設ける。継手取付構造は、取付金具18を角バー20に横方向から嵌め入れ、且つ取付金具18の係合穴に多角形取付面30を形成した継手胴部が位置するように嵌め入れた状態で、取付金具18のボルト22をねじ込んでボルト先端により角バー20を押圧することにより、角バー20にT形継手10の任意の多角形取付面30の一面を押し当てて面接触で取付固定する。
(もっと読む)
防災システム

【課題】火源探査や消火を行う複数の防災ロボットを有する防災システムにおいて消火活動を行う最適な防災ロボットの選択を防災ロボットが相互の情報交換により自律的に行い集中監視装置の負担を軽減する。
【解決手段】防災システムは、火災検出部と火災検出部の火災検出信号が入力される制御部とを備える複数の防災ロボットが防護区画に配設され、防災ロボットは、他の防災ロボットと状態情報を送受信する送受信部と、自身および他の防災ロボットの状態情報を記憶する記憶部と、を備え、制御部は、送受信部によって他の防災ロボットから受信した状態情報に対して、自身の状態情報を加えて更新された状態情報を記憶部に記憶させるとともに、送受信部によって他の防災ロボットに送信するものであって、上記複数の防災ロボットは、それぞれの更新された状態情報によって火災火源に最も近い防災ロボットを特定する。
(もっと読む)
消火装置
【課題】意匠性に優れる構造にできると共に構造がシンプルで位置制御も容易である消火装置を提供する。
【解決手段】基端側を筐体内に配置し、該基端側を旋回軸として先端側が筐体開口部から出没するように旋回する旋回アーム管9と、旋回アーム管9の先端側に旋回アーム管9に対して旋回可能に取り付けられた放水管13と、旋回アーム管9及び放水管13に旋回力を与える単一のモータ21と、モータ21の駆動力を旋回アーム管9及び放水管13に伝達して旋回アーム管9と放水管13を逆方向に旋回させる旋回力伝達機構とを備えたことを特徴とする消火装置。
(もっと読む)
消火システム
【課題】火災検出時に迅速に火災発生位置まで消火器具7を搬送し、消火活動を容易かつ安全に実行させることができる、消火システムを提供すること。
【解決手段】監視領域における火災発生を検出する火災感知器2と、火災感知器2によって検出された火災の発生位置を特定する火災発生位置特定部94aと、火災発生位置特定部94aによって特定された火災発生位置に消火器具7を搬送する消火器具搬送装置8と、消火器具搬送装置8を一意に識別する消火器具搬送装置識別情報と、当該消火器具搬送装置8の配置位置情報とを、相互に関連付けて格納する配置情報格納部92aと、当該火災発生位置まで消火器具7を搬送させる消火器具搬送装置8を選択する選択部95と、選択部95によって選択された消火器具搬送装置8に対して、当該消火器具搬送装置8を火災の発生位置に到達させるために必要な誘導情報を出力する通信部91とを備える。
(もっと読む)
消火器具搬送装置
【課題】火災検出時に迅速に火災発生現場まで消火器具を搬送し、消火活動を容易かつ安全に実行させることができる、消火器具搬送装置を提供すること。
【解決手段】消火器具搬送装置6は、消火剤を放出する消火器具5を移動させる移動部60と、消火器具5を移動部60によって火災の発生位置に移動させるための誘導情報を取得し、当該取得した誘導情報に基づき移動部60の制御を行う誘導部64とを備える。誘導部64は、移動部60が移動させた消火器具5の周囲の環境状態を特定する輻射センサ66と、輻射センサ66によって特定された輻射熱流束に基づき、消火器具5の現在位置において、人間が安全に消火活動を行うことができるか否かを判定する安全判定部68bと、安全判定部68bの判定結果に応じて、人間が安全に消火活動を行うことができる範囲内に消火器具5を位置させるように移動部60の制御を行う安全範囲維持部68cとを備える。
(もっと読む)
消火装置
【課題】放水制御データの事前設定を要することなく、消火液を正確に火源位置に到達させることができる消火装置を安価に提供すること。
【解決手段】消火装置1は、監視領域を撮影するカメラ30と、監視領域内に消火液を放出するノズル31と、カメラ30によって撮影された画像に基づき、監視領域内における火源位置、及び、消火液の到達位置を特定する位置特定部22aと、位置特定部22aによって特定された火源位置に消火液到達位置を一致させるように、ノズル31の動作を制御する放出制御部22bとを備える。
(もっと読む)
防災システム
【課題】火災の火元を簡便に特定することができるとともに、火元を消火できる消火ノズルを火元に照準を合わせて消火する簡素で安価な防災システムを提供する。
【解決手段】防災システムは、防護対象物に貼付され、上記防護対象物に関わる物理量を検出してそのまま該物理量のデータを無線信号に変換して送信する、またはさらに該物理量に基づいて火災の発生の有無を判断して火災の発生が有りと判定されたとき火災発生を示す無線信号を送信する複数のセンサタグと、該物理量のデータが変換された無線信号を受信して該物理量のデータに戻し、該物理量のデータに基づいて火災の発生を判断する、または火災発生を示す無線信号を受信するとともに上記センサタグの位置を判断する受信機と、を備える。
(もっと読む)
防災システム
【課題】火災の火元を特定し、火元を消火できる消火ノズルを火元に照準を合わせて消火する簡素で安価な防災システムを提供する。
【解決手段】防災システムは、防護対象物に貼付され、防護対象物に関わる物理量を検出してそのまま物理量のデータを無線信号に変換して送信する、または物理量に基づいて火災の発生の有無を判断して火災発生を示す無線信号を送信するセンサタグと、無線電波を受信する3本以上のアンテナと、各アンテナで受信した無線電波の電界強度を計測する電界強度計測回路と、物理量のデータが変換された無線信号を受信して物理量のデータに戻し、物理量のデータに基づいて火災の発生を判断する、または火災発生を示す無線信号を受信するとき、3本以上のアンテナで受信した無線電波の電界強度に基づいて該物理量のデータを検出したセンサタグの位置を求めて火元と見なす受信機と、を備える。
(もっと読む)
消火方法および装置
【課題】トンネル内等の比較的閉鎖された空間において発生する火災を、迅速且つ効果的に消火すると共に保守作業を容易にする消火方法および消火装置を提供すること。
【解決手段】トンネル50の両側壁の少なくとも一方に設置された走行レール10を通って消火部30を火災発生現場の近くへ走行移動させ、トンネル50の壁面に設けられた給水部20の給水口21から消火用水を得て、火災発生車両80に向けて噴射ノズル38からウォーターミストを火災発生源である車両80へ向けて噴射することにより消火する。消火部30は、走行レール10に沿って設けられた電気レール40から走行や通信および制御に必要な動力を得る。
(もっと読む)
初期火災消火装置
【課題】火災監視システムと連動させ、火災発生個所にピンポイントで水を噴射できる初期火災消火装置を提供する。
【解決手段】 高圧水噴射ノズル1の噴射ノズル口に部屋全体を噴射ターゲットにし得る可動範囲を与え、火災発生と認識された箇所へは自動的に前記高圧水噴射ノズル1が向けられ、同時に電磁弁を開いて、水道に接続されたポンプを自動的に運転し、加圧させることで火災発生個所にピンポイントで水を噴射できるようにした。
(もっと読む)
放水銃装置の調整方法及び放水銃装置
【課題】エンコーダ出力からノズル方向を示す正しいステップ数を得るための現場での調整作業が簡単且つ容易にできるようにする。
【解決手段】 ノズル30を旋回自在に設け、ノズル30の旋回位置を水平ステップ数として検出して出力するエンコーダ38を備えた放水銃装置を調整する。調整時に、ノズル30を監視区域の所定の調整ステップ数が得られる水平方向、例えば正面方向に位置決めした状態でエンコーダ38から出力されたステップ数と調整ステップ数との誤差を演算して保持し、監視時に、エンコーダ38から出力されるステップ数を調整時に保持した誤差により補正して出力する。
(もっと読む)
道路及び鉄道トンネル用消火装置
道路及び鉄道トンネル用消火装置であり、該消火装置は遠隔制御する車両から成り、該車両には熱を水により冷却するシールドを設け、トンネルに固定したモノレールに沿って走行可能であり、該消火装置は、消火のための送水管としての機能も果たす。車両には伸縮自在に延長可能なホースも担持しており、該ホースを火災の際にはモノレールに連結させ、水を引込み送水する。このホースでは水ジェットを、適当なカメラによって場所を特定した火災の中心位置に向けることが可能である。 (もっと読む)
1 - 12 / 12
[ Back to top ]