
Fターム[2F034EA04]の内容
運動の有無又は方向の指示又は記録 (1,376) | 運動方向の正逆、左右の検出 (197) | 逆転検出 (12)
Fターム[2F034EA04]に分類される特許
1 - 12 / 12
エンコーダホイール、ロータリエンコーダ、及び回転方向検出方法
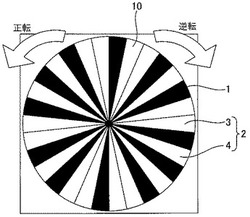
【課題】本発明は、磁気式であっても、速度検出の精度を保ったまま、1つのセンサで回転方向を検出することのできるエンコーダホイール、ロータリエンコーダ、及び回転方向検出方法を提供する。
【解決手段】回転体の回転を検出するための磁気センサを備えて前記回転体の回転に対応したパルスを出力するロータリエンコーダのエンコーダホイール10において、前記磁気センサが対向したときに、高い電圧の前記パルスが出力されるアクティブ部1と、前記パルスが出力されないインアクティブ部2とが円周方向にそれぞれ複数配列された磁気パターンを有し、前記アクティブ部1の各々は、前記円周方向に略同幅に形成され、前記インアクティブ部2は、前記円周方向に幅の異なる第1インアクティブ部3、及び第2の幅で形成された第2インアクティブ部4を含み、回転方向により、前記アクティブ部1が前記磁気センサと対向するタイミングが異なるようにした。
(もっと読む)
車輪位置検出装置およびそれを備えたタイヤ空気圧検出装置

【課題】正確に車輪位置の特定が行えるようにする。
【解決手段】受信アンテナでフレームを受信したときの受信レベルに対応したRSSI値を求めつつ、受信レベルとして想定される範囲の全域において受信レベルが大きくなるほどRSSI値が大きくなるような出力とはせず、RSSI値を飽和させる。このようにすれば、受信アンテナから近い両後輪の送信機の送信フレームのRSSI値は飽和して一定値となり、遠い両前輪の送信機の送信フレームのRSSI値は部分的に飽和するものの基本的には変動するため、RSSI値が一定値かそれとも差があるかにより前後輪の特定ができる。また、各送信機からの送信フレームに格納された回転方向情報に基づいて、左右輪の特定ができる。これにより、4輪すべてを特定できる。
(もっと読む)
車両用制御装置
【課題】車両の前進または後退を精度良く判定することができる車両用制御装置を提供することを目的とする。
【解決手段】車両用制御装置は、車両の前進または後退を判定する進行方向判定手段22を備える。前記進行方向判定手段22は、ステアリングを左に操舵したときの操舵角の値(操舵角センサ92の出力値)の符号と、車両が安定して左旋回しているときに作用する横加速度の値(横加速度センサ93の出力値)の符号を第1の符号(正)と規定し、ステアリングを右に操舵したときの操舵角の値の符号と、車両が安定して右旋回しているときに作用する横加速度の値の符号を第2の符号(負)と規定したとき、ステアリングが操作されてから所定時間内に、操舵角の値および横加速度の値のうち、一方が第1の符号であり、他方が第2の符号であるとき、車両が後退していると判定する。
(もっと読む)
センサユニット及びそれを備えたセンサシステム
【課題】従来技術のセンサユニットでは、部品点数の増加により、価格が上昇する等の問題があった。
【解決手段】本発明にかかるセンサユニットは、回転部材の回転を検出し、インピーダンス整合度情報を出力するインピーダンス調整部2と、インピーダンス調整部2から伝送路を介して供給されたインピーダンス整合度情報に基づくセンサ信号を、ワイヤレスで外部に送信するセンサ信号送信部3と、を備える。また、インピーダンス調整部2は、伝送路上に直列に接続されたインダクタンス素子L1,L2と、伝送路と電源電圧端子との間に設けられ、回転部材の回転に応じて容量値が変化する容量素子C1と、を備える。
(もっと読む)
回転検出装置および直流モータ装置
【課題】センサを設けることなくモータ電流の直流成分の大きさに関わらず回転状態を検出できるブラシ付き直流モータの回転状態を、精度良く検出する回転検出装置および直流モータ装置を提供する。
【解決手段】モータは、回転に伴ってブラシ間においてリアクタンスが変化するように構成されているので、交流電源からモータに印加された交流成分はモータの回転に伴って変化する。交流成分のオン期間をTon(n)とし、Ton(n)の直後の交流成分のオフ期間をToff(n)とする。モータに対する制動が開始されると(S306:Yes)、回転検出装置は、Ton(n)≧Ton(n+1)(S310:No)、あるいはToff(n)≧Toff(n+1)(S314:No)、あるいはTon(n+1)/Toff(n+1)≧1/2であれば(S318:No)、モータが同一方向に回転して停止するときに逆回転したと判断する(S312、S316)。
(もっと読む)
検知デバイス、およびエレベータ又はエスカレータの制御装置
本発明は、エレベータ及びエスカレータのセルフテスト機能を有する速度及び移動方向検知デバイスを開示する。検知デバイスは、120度の(電気)角度だけシフトした3つのパルスを生成するインクリメンタルエンコーダを含む。速度信号生成部は、エンコーダ信号を受信し、その周波数が入力信号の周波数に比例するパルス信号を生成する。エンコーダセルフテスト部は、エンコーダ状態をモニタし、エンコーダ信号に基づいてエンコーダエラーを検出し、方向検出部は、エンコーダパルスに基づいて方向信号を生成する。速度が0の場合であっても、この検知デバイスによって、セルフテストを実施することができる。耐故障性の速度及び移動方向検知デバイスは、従来技術よりも高い信頼性を提供し、高い安全性及び保全性レベルが要求される運動制御システムに適用することができる。  (もっと読む)
(もっと読む)
正逆転判定の誤動作防止装置
【課題】エンコーダによる検出信号を正逆転判定部に入力し、その判定信号に基づいて回転体の正逆運転を行う場合、エンコーダの出力パルスの欠落やノイズにより急激な極性変化が発生して被制御体に対し悪影響を及ぼす場合がある。
【解決手段】正逆転判定部の出力側に速度制限インターロックと信号保持回路を有する誤動作防止部を接続する。また、速度検出部の出力側に制御用速度検出信号の正逆転の切換を行う切換部と比較部を接続する。比較部はプリセット部とコンパレータを有し、プリセット部の設定値と速度検出信号との差信号に基づいて判定し、前記回転体の速度が所定値以下となったとき前記速度制限インターロックに信号を出力し、信号保持回路を介して前記切換部に切換信号を出力するよう構成した。
(もっと読む)
検出信号処理回路とそれを備えた回転検出装置
【課題】 回転体の回転速度や回転方向を検出する検出信号処理回路において、回転体の振動による出力信号の誤生成を抑制する技術を提供すること。
【解決手段】 検出信号処理回路10は、回転方向判定回路40と、マスク回路50と、位相差判定回路76を備えている。回転方向判定回路40は、第1二値化検出信号Saのレベルと第2二値化検出信号Sbのレベルの推移に基づいて回転体の回転方向を判定し、回転体の回転速度と回転方向の情報を含む回転情報信号Sa1,Sa2を出力する。マスク回路50は、回転情報信号Sa1,Sa2の伝達の停止を実行可能に構成されている。位相差判定回路74は、第1二値化検出信号Saと第2二値化検出信号Sbの位相差が所定範囲外のときに、回転情報信号Sa1,Sa2の伝達の停止を要求する要求信号を出力する。
(もっと読む)
ターボ分子ポンプ
【課題】簡単な構成により、始動時におけるロータの逆回転を容易に検出することができるターボ分子ポンプ。
【解決手段】回転数を検出するための凹凸段差が形成されたセンサターゲット46と、センサターゲット46のターゲット面と対向するように設けられインダクタンス式の回転センサ47とを備え、凸部46aを大きさの異なる2つの凸領域(角度α1の領域と角度α2の領域)に分割する位置に設けられ、センサ信号に逆転検出信号を生成させるサブターゲットとしてのスリット460を形成する。回転センサ47の出力信号には、スリット460に対応するスリット検出信号と、凸部46aと凹部46bとの段差に対応する段差検出信号とが生じる。逆転検出信号を構成するスリット検出信号と段差検出信号とを利用することで、ロータの回転方向を判断することができる。
(もっと読む)
回転可能なボディの回転方向および/または回転速度をロバストかつ効率的に求める方法および装置
本発明は、回転可能なボディの回転方向および/または回転速度に対応付けることが可能でありかつセンサによって出力される正弦波信号(y)および余弦波信号(x)に基づいて、回転可能なボディの回転方向および/または回転速度ωを決定する方法および装置に関し、これは以下のステップのうちの少なくとも1つを有する。すなわち、上記の回転方向および/または回転速度に対応付けることの可能な正弦波信号(y0)および余弦波信号(x0)を時点t0に記録するステップと、上記の正弦波信号(y0)および余弦波信号(x0)から位相値φ0を決定するステップと、上記の回転方向および/または回転速度に対応付けることの可能な正弦波信号(yi)および余弦波信号(xi)を時点tiに記録するステップと、相応する正弦波信号(yi)および余弦波信号(xi)から位相値φiを決定するステップと、上記の位相値φiと位相値φ0とから位相差Δφiを形成するステップと、この位相差Δφiからバーニヤ方式に基づいて回転方向および/または回転速度ωを決定するステップとを有する。  (もっと読む)
(もっと読む)
内燃機関のクランク角度検出装置
【課題】回転方向の誤判定を防止し、クランク角度の基準位置を容易に検出できると共に、停止時もしくは始動時の気筒及びクランク角度の検出を可能とする。
【解決手段】一部に欠け歯部を形成する等間隔に配設された被検出部を有するクランク角検出用信号板121と、被検出部が通過する毎にそれぞれ第1クランク角信号と第2クランク角信号を発生する第1信号発生手段122と第2信号発生手段123、第1クランク角信号及び第2クランク角信号の状態からクランク軸の回転方向を判定する回転方向判定手段と、欠け歯領域が第1信号発生手段もしくは第2信号発生手段を通過しているかどうかを判定する欠け歯通過判定手段とを備え、回転方向判定手段は、欠け歯通過判定手段の判定結果に応じて、クランク軸の回転方向の判定方法を変えるようにしたもの。
(もっと読む)
磁気検出装置
【課題】回転方向の検知が容易かつ確実に可能な磁気検出装置を得る。
【解決手段】磁性移動体1と、この磁性移動体1に対向して配置され、磁性移動体1に向けて磁界を印加する磁石2と、磁性移動体1に対向して配置され、磁性移動体1の回転に伴う印加磁界の変化を検出する少なくとも1つのセグメントからなるMR素子3とを備えた磁気検出装置において、磁性移動体1は、その回転方向に応じてMR素子3に対して非対称な磁界変化を発生させる形状を有するものである。
(もっと読む)
1 - 12 / 12
[ Back to top ]