
Fターム[2F065QQ13]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の微分、差分 (1,068)
Fターム[2F065QQ13]に分類される特許
1,061 - 1,068 / 1,068
ラバーシート内の結合部を検出するための装置
負荷されていない状態で、シート部品の少なくとも1つの結合部またはスプライス接続部における欠陥を検出するための方法、および/または結合部またはスプライス接続部の幾何学的特徴を検出するための方法であって、
a.前記結合部またはスプライス接続部を非一方向電磁放射線に当て;
b.前記結合部またはスプライス接続部によって反射または屈折された放射線の二次元検出を行い;
c.前記二次元検出に対応する出力信号を形成し;
d.当該出力信号を分析することによって、前記結合部またはスプライス接続部の少なくとも一部の生じている可能性のある欠陥または幾何学的特徴を定める、
ステップを有している、
ことを特徴とする方法。  (もっと読む)
(もっと読む)
深度情報を含む画像の生成方法と装置
深度情報を含む画像を生成する方法と装置が提供される。この方法では、場面から発する放射を検出し、異なる面における場面の少なくとも2つの画像を形成する。各画像は強度データ値のセットを有する。データ値の変動が得られ、強度分散の2つのセットがデータ値から得られ、強度分散データは深度情報を得るために処理される。深度情報は、画像データにおける異なる深度情報を識別するためにコード化される。
 (もっと読む)
(もっと読む)
縫い糸又は織り糸の2次元分析を含む、光学式分析装置
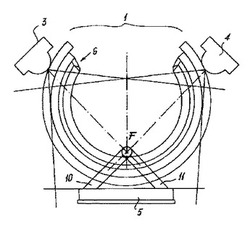
【解決手段】 繊維機械に供給される縫い糸又は織り糸(F)の2次元分析を含む、光学式分析装置であって、少なくとも1個の発光素子(3、4)と、少なくとも1個の受光素子(5)とを備える。発光素子(3、4)は、受光素子(5)により検知される前に、糸(F)に当たる光信号を発生し、受光素子の検知に基づいて、発光素子(3、4)と受光素子(5)間での、移動、停止、寸法的な欠陥又はその他の寸法的な特徴等の、糸(F)の特徴を明らかにする。光信号が、糸(F)と関係を持った後で、光信号により照射を受け、糸ガイドとして機能する、光透過手段(6)を介在させる。 (もっと読む)
多軸干渉計ならびに多軸干渉計を用いる方法およびシステム
一般的に、一態様において、本発明を特徴付ける装置は、少なくとも3本の出力ビームを生成するように構成された多軸干渉計を含む。各出力ビームは、対応する測定軸に沿っての干渉計と測定物体との間の距離についての干渉分光情報を含み、少なくとも3本の測定軸は共通面内にあり、各出力ビームは、共通のビーム経路に沿って測定物体までの光路を形成する成分を含む。  (もっと読む)
(もっと読む)
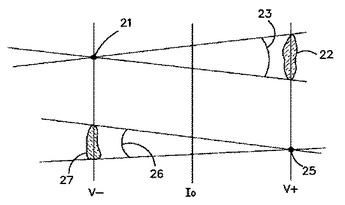
物体の状態を推定する推定システム、推定方法および推定プログラム
3次元モデル記憶手段(170)は、対象物体の3次元形状データおよび照明基底データを予め記憶する。比較画像生成手段(110)は、3次元形状データおよび照明基底データにもとづいて、入力画像と同じ照明条件の下で、現時点での推定値の位置/姿勢に対象物体がある再現画像を比較画像として生成する。画像変位分布検出手段(120)は、比較画像を部分画像(小領域)に分割し、小領域ごとに比較画像と入力画像との画像変位分布を検出する。姿勢差分検出手段(130)は、画像変位分布および3次元形状データにもとづいて位置姿勢差分値を算出する。そして、終了判定手段(140)は、位置姿勢差分値が所定の閾値より小さいと判断した場合に、現在の位置姿勢推定値を最適位置姿勢推定値(13)として出力する。これにより、画像に含まれる物体の位置や姿勢を高速に推定できるようになる。 (もっと読む)
平面分光器を用いた異種品検出装置
【課題】搬送される対象物を平面分光器を用いて、高い分解能で異種品の検出を可能とすること。
【解決手段】本発明では、搬送手段(11)と、近赤外線の照射手段(4)と、反射光を平面分光する平面分光手段(2)と、撮像手段(3)と、反射光のスペクトルデータを得て主成分分析手法を用いて異種品を検出する解析手段(5)とを備え、前記解析手段(5)は、前記スペクトルデータを平均化および標準化する前処理、波長軸平均化処理、ラグランジェ補間する補間処理、測定位置最適化処理、空間軸平均化処理、一次・二次微分および平滑化する変換処理、予め取得したローディングベクトルデータに基づいて主成分得点を算出する主成分得点算出処理、および異種品の判定を行う判定処理を行う。
(もっと読む)
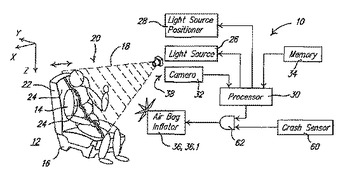
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
試料の面積またはコンフルエンスを決定するための方法と装置
試料の面積またはコンフルエンスは、試料と試料の周りのバックグラウンドに関する定量的位相データを得ることにより決定される。試料の境界は、位相データ測定値のヒストグラムを作成し、ヒストグラムの導関数を取って、それにより最大スロープの点を決定することにより、定量的位相データから決定される。境界に適用可能なデータ値を求めるために、既定のデータ値を上回るか下回るデータ値は試料内にあると見なすように導関数上の最もよく適合する線が使用される。 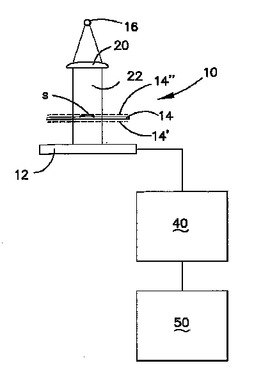 (もっと読む)
(もっと読む)
1,061 - 1,068 / 1,068
[ Back to top ]