
Fターム[2F077TT36]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | パルス化、アナログ−デジタル変換 (802) | ヒステリシス特性を持つもの (13)
Fターム[2F077TT36]に分類される特許
1 - 13 / 13
位置検出装置
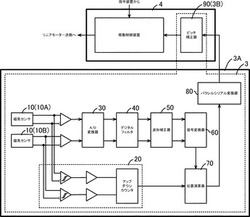
【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、精密機器の移動装置に適用し得る検出精度を有していない。
【解決手段】主位置演算器20は現在位置の上位桁である主位置データを出力し、従位置演算器60は現在位置の下位桁である従位置データを出力する。主位置演算器20は、磁気センサ10の検出信号から2相の矩形波信号を得て計数信号を発生し、計数信号を累積加減算して主演算データを得る。デジタルフィルタ40は、移動平均によって検出信号の振動成分を濾波する。従位置演算器60は、検出信号の逆正接を求めて従位置データを得る。位置演算器70は、主位置データと従位置データを加算して位置データを生成する。ピッチ補正器90は、移動方向に合わせて位置データをピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
回転角度計測装置

【課題】回路コストを低減するため差動増幅回路やアナログ・デジタル変換回路が必要のない回路構成を有する回転角度計測装置を提供する。
【解決手段】回転軸と同期して回転する磁界発生手段が発生する磁界方向を少なくとも2以上の位相の異なる電気信号として出力するセンサ素子部211,212,221,222,231,232,241,242を有する回転角度センサ2と、センサ素子部を駆動させる周期波形を回転角度センサに出力する信号発生回路35と、センサ素子部から得られた出力が入力されるコンパレータ31,32,33,34と、コンパレータからの出力が入力される演算回路40と、を有し、演算回路は、コンパレータから出力されるパルス波形をデジタル値として取り込むパルス入力端子を有し、パルス入力端子で取り込まれた値に基づき回転軸の回転角度と等価である磁界方向を演算し出力する構成とした。
(もっと読む)
エンコーダパルス生成装置、エンコーダパルス生成方法、及び、コンピュータプログラム
【課題】 エンコーダで得られたアナログエンコーダ信号に基づいて検出された角度に応じて生成されるエンコーダパルス信号のエッジが乱れることを容易に且つ確実に抑制する。
【解決手段】 擬似正弦波として入力されたアナログエンコーダ信号102、104に基づいて、エンコーダで検出した角度を示す角度データ152を導出し、導出した角度データ152に基づいてエンコーダパルスのデータを順次生成する。この際に、出力したエンコーダパルスのデータをラッチしておく。そして、逓倍設定値に基づくエンコーダパルスの変化点からα度の範囲では、それまでにラッチしておいたデータを使用し、その他の角度の範囲では、生成したデータを使用する。
(もっと読む)
電圧処理回路
【課題】回転体の回転角の変化に正確に対応するタイミングで反転するタイミング信号を出力する回路を提供する。
【解決手段】センサ10からの信号電圧を入力して増幅する増幅回路110と、増幅後電圧のピーク値Vpを保持するピークホールド回路120と、増幅後電圧のボトム値Vbを保持するボトムホールド回路130と、ピーク値Vpとボトム値Vbの差ΔVが小さいほど大きな値をとる分圧比Aと、Vref=Vb+A×(Vp−Vb)の式に従って計算される閾値電圧Vrefを出力する閾値電圧出力回路140と、増幅後電圧が閾値電圧Vrefを超えて変化するときに反転するタイミング信号を出力する回路150を備えている。ピーク値Vpとボトム値Vbの差ΔVによって信号波形が変化することが補償でき、回転角の変化に正確に対応するタイミングで反転するタイミング信号を得ることができる。
(もっと読む)
回転検出装置の信号処理装置
【課題】チャタリングが発生した場合であっても、回転体の正しい位置を検出可能な検出信号を出力する回転検出装置の信号処理装置を提供すること。
【解決手段】チャタリング状態の間に、有効エッジによるメインセンサの信号変化が連続して発生した回数が偶数回であった場合、初回の有効エッジによるメインセンサ信号の変化が生じたときのロータの回転方向とは逆の回転方向へロータが回転していることを示す補正パルス信号を出力する。これにより、検出信号によるロータの位置と、実際のロータの位置とを一致させることができ、検出信号によりロータの正しい位置を検出することができるようになる。
(もっと読む)
磁気検出装置
【課題】磁性移動体の移動方向を遅れなく正確に検出できる磁気検出装置を得る。
【解決手段】磁界強度を検出する磁電変換素子の出力信号a、bと閾値c、dとの比較により矩形波の信号e、fを出力する比較回路21、22と、この比較回路の出力を用いて
、磁性移動体の移動位置と移動方向を検出する信号処理部とを有する信号処理回路を備えた磁気検出装置において、信号処理回路の出力iは、磁性移動体の移動方向によりハイレベルもしくはローレベルである時間幅が期間t1もしくは期間t2に固定され、期間t1もしくは期間t2の時間内に磁性移動体の移動方向が切り替わった場合に、信号処理回路は、比較回路の閾値がヒステリシスを有することにより、磁性移動体の移動方向が切り替わる直前の磁性移動体の位置を示す位置信号と同一の位置信号を出力するようにした。
(もっと読む)
位置センサ
【課題】ヒステリシスを与えても、レゾルバの検出角度に誤差を生じることの少ない位置センサを提供すること。
【解決手段】 第1励磁信号sinカーブS1と、第1励磁信号S1に対して90度位相を変えた第2励磁信号cosカーブにより、第1励磁コイル12と第2励磁コイル13とを励磁し、その励磁により生じる磁界の変化により発生する出力信号S2を検出し、第1励磁信号S1と出力信号S2との位相差をゼロクロス検出により算出し、該検出コイルの位置を算出する位置算出器17とを有し、位置算出器17が、第1励磁信号S1と出力信号S2のうち、大きな最大振幅E1を有する信号である第1励磁信号S1(E1=A)に対して、第1ヒステリシス電圧a=0.2Vを設定し、小さな最大振幅E2を有する信号である出力信号S2(E2=AB)に対して、aにE2/E1=AB/B=B=0.5を乗じた第2ヒステリシス電圧0.1Vを設定する。
(もっと読む)
検出信号処理回路とそれを備えた回転検出装置
【課題】 回転体の回転速度や回転方向を検出する検出信号処理回路において、回転体の振動による出力信号の誤生成を抑制する技術を提供すること。
【解決手段】 検出信号処理回路10は、回転方向判定回路40と、マスク回路50と、位相差判定回路76を備えている。回転方向判定回路40は、第1二値化検出信号Saのレベルと第2二値化検出信号Sbのレベルの推移に基づいて回転体の回転方向を判定し、回転体の回転速度と回転方向の情報を含む回転情報信号Sa1,Sa2を出力する。マスク回路50は、回転情報信号Sa1,Sa2の伝達の停止を実行可能に構成されている。位相差判定回路74は、第1二値化検出信号Saと第2二値化検出信号Sbの位相差が所定範囲外のときに、回転情報信号Sa1,Sa2の伝達の停止を要求する要求信号を出力する。
(もっと読む)
シリアルエンコーダデータ変換回路およびサーボドライブシステム
【課題】応答性の良いC相パルスを生成できるシリアルエンコーダデータ変換回路を提供する。
【解決手段】伝送制御部2はシリアルデータ1をシフトクロック4でシリアル/パラレル変換部5へ入力する。シリアル/パラレル変換部5に保持されたデータのうちの原点位置データ23はシリアルエンコーダの原点通過を示す原点通過ビット24でレジスタ21に保持される。C相パルス生成部23は、レジスタ21の出力データとアップダウンカウンタ出力データ18を比較して一致した時にC相パルスを出力する。
(もっと読む)
移動量演算装置、レンズ鏡筒
【課題】検出対象の移動量を演算するときに、その検出対象の移動速度に応じて、センサ出力信号からの変換に用いるしきい値のヒステリシス幅を適切に設定することができる移動量算出装置およびレンズ鏡筒を提供する。
【解決手段】基準電圧発生器36により所定の基準電圧を発生し、比較器32、34へ出力する。D/A変換器37は、コントローラ35から出力されるヒステリシス幅ΔVの情報をアナログ値に変換し、比較器32、34へ出力する。コントローラ35は、ヒステリシス幅ΔVを検出対象であるレンズの移動速度に応じて変化させる。これにより、比較器32、34において、基準電圧を中心に、レンズの移動速度に応じて変化するヒステリシス幅ΔVを有する2種類のしきい値が設定される。このしきい値に基づいて磁気センサ7からの出力を比較器32、34により変換し、レンズの移動量を演算する。
(もっと読む)
作業車両
【課題】回転数センサの故障を判定するとともに、回転数を精度よく検出する。
【解決手段】回転数検出センサ1からの出力により回転体2の回転数に応じた周波数信号Vsを発生する信号発生回路8と、信号発生回路8からの周波数信号Vsを所定のスレッショルド電圧Vth1,Vth2と比較することにより、2値振幅のパルス信号V0に波形整形する波形整形回路10と、回転体2の回転停止または回転数検出センサ1の故障によりパルス信号V0が発生しないときのみ、信号発生回路8に故障状態判定用の電圧を印加するとともに、回転数検出センサ1の故障状態に応じて変化する電圧Vkを検出し、その検出結果に応じてセンサ1の故障状態を判定する故障判定回路20とを有する。
(もっと読む)
コンパレータ、信号処理装置および方法
【課題】 簡単な構成でしきい値を容易に収束させることができるコンパレータを提供し、またそのコンパレータを用いる信号処理装置および方法を提供する。
【解決手段】 センサ入力が時刻t10でしきい値のハイレベル側からローレベル側に変化すると、しきい値はハイレベル側に遷移する。センサ入力がしきい値をローレベル側に越えた瞬間に、しきい値を反転しにくい方であるハイレベル側へずらすので、時刻t10の直後にノイズが重畳されても、誤反転しにくくすることができる。センサ入力がローレベル側からハイレベル側に変化の方向を逆転する前に、しきい値が漸次設定値に近付くように、しきい値を段階的に変化させる。しきい値の有効ビット数を少なくするような場合、しきい値が設定値に達しなくても、変化量が0になってしまう。そこで、強制的にしきい値を設定値に収束させる。
(もっと読む)
回転角検出装置
【課題】構造の簡素化や部品点数の抑制による低コスト化を図ることができる回転検出装置を提供すること。
【解決手段】回転角センサ10(磁石11、磁界の変化により抵抗値が変化する第1磁気抵抗素子12および第2磁気抵抗素子13、電気信号(A点)を異なる閾値で2値化する第1コンパレータ15、第2コンパレータ16)と、クランクシャフトに固定され、多数の歯21を有するギヤ20と、ECU30(回転角センサ10から出力される2値化信号のそれぞれの状態(HiあるいはLo)に基づく出力パターンを連続的に取得する出力パターン取得部35、この出力パターンを順次記憶する記憶部33、順次記憶する出力パターンのうち所定間隔ごとの出力パターンを他の出力パターンに置き換えて記憶部33に記憶する置換部36、順次記憶された出力パターンの順番に基づいてクランクシャフトの回転方向を検出する回転方向検出部37)とを備える。
(もっと読む)
1 - 13 / 13
[ Back to top ]