
Fターム[2F112AC01]の内容
光学的距離測定 (16,745) | 二重像合致式基線長三角測距 (693) | 基線方向に配列された多数の受光素子の使用 (230)
Fターム[2F112AC01]の下位に属するFターム
測距装置の光軸を機械的に変動させるもの (17)
測距装置の光軸が固定されているもの (203)
Fターム[2F112AC01]に分類される特許
1 - 10 / 10
車軸検出装置
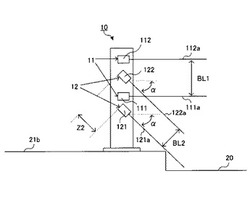
【課題】小型でありつつも、車軸の検出距離範囲が広範囲である非接触型の車軸検出装置を提供すること。
【解決手段】車両の進行方向と交差する方向から路面(20)を撮像する第1および第2のステレオ画像取得手段(11,12)にて撮像したステレオ画像の視差情報に基づいて前記車両の車軸を検出する車軸検出手段を備えた車軸検出装置(10)であって、第1のステレオ画像取得手段(11)は、第1の焦点距離を持つ少なくとも2台以上のカメラから構成され、第2のステレオ画像取得手段(12)は、第1の焦点距離よりも短い第2の焦点距離を持つ少なくとも2台以上のカメラから構成され、第2のステレオ画像取得手段(12)を構成するカメラの少なくとも1台が、高さ方向において第1のステレオ画像取得手段(11)を構成するカメラの間に配置される構成とする。
(もっと読む)
画像処理装置、車両

【課題】コスト低減が可能な、ステレオカメラを用いた画像処理装置を提供する。
【解決手段】複数のステレオカメラを備え、車両周辺の対象物との距離を検出する画像処理装置100であって、車載されたセンサと、センサの検出信号を組み合わせて車両状況を判定し、車両状況に基づき画像処理対象の画像データを運転支援用のステレオカメラが撮影した画像データからドア開閉支援用のステレオカメラが撮影した画像データに切り替える状況判断・画像選択手段11と、状況判断・画像選択手段によって選択された画像データに、相関演算部が複数のステレオカメラに共通の相関演算処理を行うことを可能にする前処理手段12と、1つのステレオカメラが撮影した2つの画像データに相関演算を施す相関演算手段13と、相関演算手段の演算結果を用いて対象物までの距離を検出する距離検出手段14と、を有する。
(もっと読む)
ステレオ画像処理方法およびステレオ画像処理装置
【課題】 対象物と撮像装置との距離に応じて、高精度、高速に対象物の3次元情報を取得する。
【解決手段】 対象物を撮像する撮像装置と、同一の対象物を複数の方向から撮像した複数の高解像度画像を取得する画像取得部と、低解像度画像を生成する低解像度画像生成部と、基準画像上の点に対応する比較画像上の対応点を探索する対応点探索部と、対応点の探索結果に基づいて3次元情報を演算する3次元情報演算部と、低解像度画像に基づく3次元情報から高解像度画像における探索点の距離範囲を決定する距離範囲決定部と、距離範囲に基づいて高解像度画像における探索ウィンドウサイズを決定するウィンドウサイズ決定部と、距離範囲により定まる視差範囲に基づいて高解像度画像における前記対応点の探索範囲を限定する探索範囲限定部と、を備える。
(もっと読む)
撮影システム
【課題】スポーツ中継、特に競馬中継やトラック競技中継などの撮影を行う際、複数の競走馬や選手等の主被写体を撮影した状態で、撮影画面に映っていないゴールまでの距離を情報として画面上に表示する。
【解決手段】本発明の撮影システムは、被写体を撮影する撮影手段と、該撮影手段の撮影画角内の被写体の被写体距離を測定する測距手段と、該撮影手段をパン方向、チルト方向に回動する回動手段と、該回動手段を所定の場所に支持する支持手段と、該回動手段のパン角及びチルト角を検出するパン・チルト角検出手段と、該測距手段で得られた被写体距離及び前記パン・チルト角検出手段で得られたパン角及びチルト角に基づいて、該被写体と、回動手段の所定のパン角のときの光軸の方向と鉛直方向を含む平面である基準面との間の距離を算出する距離算出手段と、を有する。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。  (もっと読む)
(もっと読む)
距離計測装置及び距離計測方法
【課題】複数のカメラの取り付け位置の自由度を高めることができ、距離計測のためのキャリブレーションを行う必要がない距離計測装置を提供する。
【解決手段】所定距離だけ離れた2台のカメラによって、距離を計測するべき対象物体の2枚の画像の画像データを取得する画像取得手段と、画像データ中の無限遠方の像が互いに重なり合うように2枚の画像データを重ね合わせる画像合成手段と、無限遠方の像が互いに重なり合った状態における対象物体像のずれ量を求め、該ずれ量に基づいて、対象物体までの距離を計測する距離算出手段とを備えた。
(もっと読む)
距離画像生成装置、距離画像生成方法及びプログラム
【課題】高精度かつ高速に距離画像を生成することのできる距離画像生成装置、距離画像生成方法及びプログラムを提供する。
【解決手段】基準画像と参照画像とを取得する撮像装置2a,2bと、基準画像及び参照画像について解像度の異なる複数の階層画像を生成する多重解像度画像生成部13と、少なくとも最低解像度の階層画像に対して対応点探索を行うSAD演算部6と、少なくとも最高解像度の階層画像に対して対応点探索を行うPOC演算部7を備え、低解像度の階層画像から対応点探索を開始し、順次解像度の高い階層画像について対応点探索を行い、最高解像度の階層画像に至るまで順に対応点探索を繰り返す対応点探索部15と、直前の階層についての探索結果に基づいて次の階層の階層画像の探索領域を設定する探索領域設定部14と、探索結果に基づいて距離画像を生成する距離画像生成部16とを備えている。
(もっと読む)
遠赤外線撮像システム及び遠赤外線撮像方法
【課題】複数の遠赤外線撮像装置の出力値を、同一の対象物に対しては略一致するように補正することができる遠赤外線撮像システム及び遠赤外線撮像方法を提供する。
【解決手段】 マトリックス状に配列された撮像素子を有し、車両の周辺の画像を撮像した画像データを前記撮像素子の出力値として取得する複数の遠赤外線撮像装置が相互にデータ通信可能に接続してあり、撮像された画像に基づいて撮像素子ごとに出力値を補正して出力する。一の遠赤外線撮像装置は、画像中の路面を示す領域を設定し、設定された路面を示す領域の出力値の平均値を算出し、他の遠赤外線撮像装置へ送信する。他の遠赤外線撮像装置は、算出された平均値を受信し、画像中の路面を示す領域を設定し、設定された路面を示す領域の出力値の平均値を算出し、両平均値を略一致させるオフセット補正値を算出して、出力値を補正する。
(もっと読む)
距離測定装置及びその距離測定方法、及び距離測定装置を備えたプロジェクタ又はカメラ
【課題】距離を精度良く測定する。
【解決手段】測距部14の光センサ部51は、2つの光センサアレイを備える。光センサ部51は、スクリーン2に投影されたチャート画像からの光を2つの光センサアレイでそれぞれ受光し、受光した光によって結像したチャート画像の画素データを取得する。測距処理部52は、光センサ部51からチャート画像の画素データを取得し、この画像データのばらつきを示す指標値として標準偏差値を取得する。測距処理部52は、光センサ部51から取得した画素データを、取得した標準偏差値で光センサアレイ毎に距離計算の精度を向上させる指標値に変換し、変換した画素データに基づいて位相差を取得し、取得した位相差に基づいてスクリーン2までの距離を測定する。
(もっと読む)
自動合焦装置、デジタルカメラ、携帯情報入力装置、合焦位置検出方法、およびコンピュータが読取可能な記録媒体
【課題】ズームレンズ系を備えた自動合焦装置において、短時間でかつ正確な合焦位置を検出することが可能な自動合焦装置を提供すること。
【解決手段】本発明にかかる自動合焦装置は、被写体像を所定位置に結像するフォーカスレンズ101aおよびズームレンズ系101bを含むレンズ系101と、レンズ系101を介して入力される被写体像を撮像して画像データを出力するCCD103と、CCD−AFと外部AFの検出結果に基づいて最終的な合焦位置を決定するCPU121とを備え、レンズ系101bの焦点距離に応じてCCD−AFのサンプリング条件を設定する。
(もっと読む)
1 - 10 / 10
[ Back to top ]