
Fターム[2F112AC02]の内容
光学的距離測定 (16,745) | 二重像合致式基線長三角測距 (693) | 基線方向に配列された多数の受光素子の使用 (230) | 測距装置の光軸を機械的に変動させるもの (17)
Fターム[2F112AC02]に分類される特許
1 - 17 / 17
車両周辺情報提供システム及びその方法
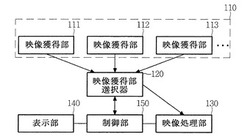
【課題】道路の地面と周辺移動物体に対する正確な位置情報が得られる車両周辺情報提供システム及びその方法を提供する。
【解決手段】この車両周辺情報提供システムは、予め定めた間隔で車両に設けられる複数の映像獲得部と、映像獲得部のうち少なくとも二つ以上を選択し、選択された映像獲得部から映像データを受信する映像獲得部選択器と、映像獲得部選択器から受信した映像データから障害物認識及び位置を算出し、車両の車速情報に従い映像獲得部のうち少なくとも二つ以上の映像獲得部を選択するように映像獲得部選択器を制御する制御部と、を含んで構成される。
(もっと読む)
車載カメラを用いた測距装置

【課題】単一の車載カメラによって取得される撮像画像を基に、車両の外部の移動体と自車両との間の距離を測定することできる測距装置を提供する。
【解決手段】車載カメラ2により異なる時刻で取得された第1撮像画像と第2撮像画像のうちの第1撮像画像において、移動体Mの路面に対する接地点Pに対応する画像上移動体接地点P1を特定し、車両との間の距離が移動体Mの接地点Pと同一の距離となる静止点Qに対応する第1撮像画像上の点Q1と第2撮像画像上点Q2とを第1撮像画像及び第2撮像画像から抽出する。抽出した点Q1,Q2を用いて、モーションステレオの手法によって、静止点Qと車両との間の距離と算出し、算出した距離を移動体Mと車両との間の距離として決定する。
(もっと読む)
3次元距離計測装置及びその方法
【課題】曲面のエッジ部分等における形状計測精度の向上を図り正確なギャップ計測を行う3次元距離計測装置及びその方法を提供する提供する。
【解決手段】画像を撮影する複数の撮像装置と、計測対象物が所定範囲で重なるように撮像装置を回転させて光軸を調整する回転駆動装置とを備えた3次元撮影手段と、複数の画像に写された所要計測点の画素の位置対応付け情報を演算する対応付け演算処理手段と、位置対応付け情報と回転駆動装置の回転情報とを用いて計測対象物の3次元形状を演算する3次元形状演算処理手段と、3次元形状から計測対象物の3次元形状が得られない領域の3次元形状を推定する3次元形状推定演算処理手段と、推定結果より計測対象物上において指定された2点の距離計測点の3次元座標を演算する3次元計測座標演算処理手段と、これらの3次元座標を用いて2点間の距離を演算する距離演算処理手段とを備えた。
(もっと読む)
距離測定装置及び距離測定方法
【課題】カメラの台数を増やさないように、2つの画像を比較して対応点を探索するための計算負荷が高くならないように、また基線長を延長する時にカメラの移動時間が長くならないようにすることによって、要求精度を満たす距離測定を短時間で効率的に行うことができる距離測定装置を低コストで提供すること。
【解決手段】本発明の距離測定装置は、物体を撮影する複数の撮像手段(10a,10b)と、
前記撮像手段のうち2つ以上の撮像手段からの画像により、物体までの距離を算出する距離計算手段(13)と、
前記撮像手段の位置を制御する位置制御手段(18)と、
前記距離計算手段により算出された距離によって、要求精度を達成するために必要な基線長を算出する基線長計算手段(15)と、
前記基線長計算手段が算出した基線長を記憶する基線長記憶手段(16)とを備えることである。
(もっと読む)
デュアルステレオカメラを備えた距離測定装置
【課題】より正確な距離情報を抽出できるデュアルステレオカメラを備えた距離測定装置を提供する。
【解決手段】距離測定装置は、1つの基板上に所定の間隔で配置された左眼CMOSイメージセンサ113及び右眼CMOSイメージセンサ115を有し、基準物体の視差を検出して距離情報を抽出する第1ステレオカメラ110と、該第1ステレオカメラ110から一定距離隔てて配置され、1つの基板上に所定の間隔で配置された左眼CMOSイメージセンサ123及び右眼CMOSイメージセンサ125を有し、基準物体の視差を検出して距離情報を抽出する第2ステレオカメラ120と、前記第1ステレオカメラから得られた基準物体に対する距離情報と前記第2ステレオカメラから得られた前記基準物体に対する距離情報を比べて、前記基準物体に対する距離情報を抽出する距離マップマッチング部130とを備える。
(もっと読む)
位置計測システム及び位置計測方法
【課題】対象物のステレオ視によって対象物の位置を計測するに際し、量子化誤差を軽減することができる位置計測システム及び位置計測方法を提供する。
【解決手段】位置計測システム1では、対象物Tのステレオ視において2台のカメラの視線領域が重なる重複領域に対象物Tの真値(真の座標)が存在することに鑑み、視線領域SR1,SR2が、カメラ21,22の移動によって、隣り合う一方の視線領域から他方の視線領域に移動したことを検出したときには、視線領域SR1と視線領域SR2とが重なる重複領域DR1のうち、一方の視線領域と他方の視線領域との境界領域に対象物Tが位置すると判断し、対象物Tの位置を算出する。これにより、重複領域DR1から境界領域へと、真値が存在する領域が狭められる。
(もっと読む)
撮像装置及び撮像方法
【課題】遠方の被写体であっても距離を測定可能で且つ複数視点での撮像が可能な小型の撮像装置を提供する。
【解決手段】それぞれ垂直方向に距離をおいて同一方向を撮像可能な2つの撮像部からなるペア(撮像部1a,2aのペア、撮像部1b,2bのペア、撮像部1c,2cのペア、撮像部1d,2dのペア、撮像部1e,2eのペア)を有する撮像装置100であって、各ペアの撮像方向は異なっており、ペアのうちの一方の撮像部(1a〜1e)を支持する上支持体1と、ペアのうちの他方の撮像部(2a〜2e)を支持する下支持体2と、上支持体1と下支持体2を垂直方向に相対移動可能に連結する連結部とを備える。
(もっと読む)
距離測定方法および装置
【課題】2つの撮像手段を用いる距離測定方法において、距離情報に大きな誤差が発生することを防止する。
【解決手段】所定の基線長を間に置いて配置した2つの撮像手段によって被写体を撮影し、この撮影で得られた2つの画像間の各対応点に関する視差量に基づいて該対応点の距離情報を求める距離測定方法において、前記基線長を任意の値として第1回目の撮影を行った後、撮像手段の画素ピッチをL、mを任意の自然数、nを2以上の整数として、基線長をそれぞれL{m+1/n}、L{m+2/n}・・・L{m+(n−1)/n}だけ変更して合計n回の撮影を行い、n回の撮影毎に視差量演算部23で演算して得られた視差量のうち、各回の撮影を通じて共通の所定範囲にある視差量のみを記録判定部25で抽出し、それらの抽出された視差量に基づいて距離情報を求める
(もっと読む)
遠距離視標探査カメラシステム
【課題】構造を簡略化しつつ、遠距離から近距離まで幅広く視標の探査・追跡が可能な遠距離視標探査カメラシステムを提供する。
【解決手段】遠距離の視標を探査する遠距離視標探査カメラシステムは、輻輳運動可能な一対の輻輳カメラ10と、一対の輻輳カメラ10よりも挟角な視野を有する望遠カメラ20と、一対の輻輳カメラ10よりも広角な視野を有する広角カメラと30とからなる。望遠カメラ20は、一対の輻輳カメラ10の視線の交点の軌跡線に略等しい視線を有する。広角カメラ30は、望遠カメラ20の視線に略等しい視線を有する。そして、これらが設置される基台40と、基台40の運動制御を行う基台運動用モータ50とを具備する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングを行う際に、対応点の探索のための演算量を低減して、精度良く対応点を求めるようにする。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。この際、距離画像D1上において定められた基準点を基準とした所定の距離範囲内にある領域を、基準画像および参照画像の対応点の探索範囲に設定する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングにより距離画像を生成する際に、立体撮像装置から被写体までの距離が大きくても、距離画像を精度良く生成する。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。基線長変更手段38が、第1の距離画像に基づいて被写体までの距離である被写体距離を算出し、被写体距離が大きいほど撮像部2B,2C間の距離である基線長を大きくするよう変更する。基線長の変更後、撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】TOF方式により測距を行うための撮像手段と、ステレオマッチングにより測距を行う撮像手段を備えた立体撮像装置において、被写体への測距光の照射を制限できるようにする。
【解決手段】第1の距離画像生成部30において、第1の撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。第2および第3の撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。この際、第1の撮像部2Aによる撮像前に第2および第3の撮像部2B,2Cにより撮像を行い、顔検出部39がこれにより取得した画像から顔等の所定被写体を検出する。所定被写体が検出された場合には、第2および第3の撮像部にのみ撮像を行わせ、第2の距離画像生成部32にのみ距離画像D2を生成させる。
(もっと読む)
距離測定装置、距離測定プログラム及び方法
【課題】 複数位置から撮像された対象物の撮像画像に基づいて、前記対象物までの距離を測定する距離測定装置、距離測定プログラム及び方法を提供する。
【解決手段】 撮像画像に基づいて撮像された対象物までの距離を測定する距離測定装置20であって、前記対象物を直線上の複数位置から撮像する撮像手段207と、前記複数位置の前記直線上における距離を取得する距離パラメータ取得手段206と、前記複数の撮像画像における前記対象物を指定する対象物指定手段207と、前記対象物までの距離を前記複数の画像と前記距離パラメータとに基づいて算出する距離算出手段205とを有する。
(もっと読む)
カメラ用距離計測装置およびカメラシステム
【課題】 使い勝手が良く、カメラによる撮影時にも距離計測が可能なカメラ用距離計測装置およびそのカメラ用距離計測装置を備えたカメラシステムを提供すること。
【解決手段】 外部装置を装着するための装着部を備えたカメラに着脱可能なカメラ用距離計測装置であって、視差を有する少なくとも2枚の画像を生成する撮像部と、撮像部により生成した画像に基づいて、対象物までの距離を計測する計測部と、装着部に接続可能な接続部とを備える。なお、計測部による計測結果に基づく情報を表示する表示部をさらに備えても良い。また、カメラとの間の通信を行う通信部をさらに備えても良い。
(もっと読む)
物体監視装置
【課題】簡便な構成の車載装置によって、車室への侵入者等の誤検出の防止を図る。
【解決手段】車両に搭載される物体監視装置1は、駐車時に、車両への侵入者を検出する。ステレオカメラ2は車室内を撮像する。物体検出部14は、撮像された画像中、この車両のウインドウガラスに対応する部分を除いた監視領域について算出された距離データの経時的変化に基づいて、車室において侵入者がいることを検出する。
(もっと読む)
撮像装置及び撮像素子
【課題】 本発明は、撮像装置及び撮像素子に関し、例えば立体視に供する画像の撮像、視差を利用した測距に適用して、立体視に係る撮像に関して、簡易に作成することができ、かつ容易に解像度を増大させることができるようにする。
【解決手段】 本発明は、レンズ2からの入射光L1を複数の光束L11、L12に分離した後、指向性の異なる撮像素子11R、11Lで撮像して視差を有する画像SR、SLを取得する。
(もっと読む)
ステレオカメラ、およびステレオカメラ用ステー
【課題】 ステレオカメラにおいて、簡単な構成で2つの撮像部の位置調整を精度よく行う。
【解決手段】 ステレオカメラ2のステー21は、第1撮像部12aが固定される固定部21aと、第2撮像部12bが取り付けられ、第2撮像部12bのピッチ、ヨー、ロール軸まわりの回転位置調整を行う調整機構が設けられた調整部21bと、固定部21aおよび調整部21bを、所定の間隔を開けて一体的に連結する基幹部21cとからなる。調整機構は、第2撮像部12bが固着される保持板45と、保持板45の一部分を第2撮像部12bのピッチ、ヨー、ロール軸まわりの回転中心として軸支するスタッド46と、保持板45に第2撮像部12bのピッチ、ヨー、ロール軸まわりの方向の回転力を与えるコイルバネ48b、48c、板バネ49と、第2撮像部12bのピッチ、ヨー、ロール軸まわりの変位量を調整するネジ53a、53b、56とを備える。
(もっと読む)
1 - 17 / 17
[ Back to top ]