
Fターム[3C001TC04]の内容
Fターム[3C001TC04]に分類される特許
1 - 3 / 3
移動体の制御方法、制御装置及び加工装置
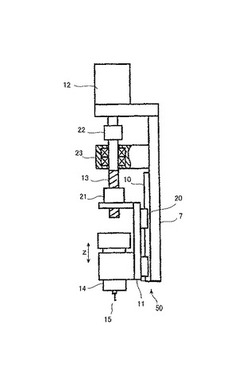
【課題】移動距離が短い場合であっても、加工精度を維持すると共に、保守を容易にする。
【解決手段】ボール(転動体)を有する直線案内装置50をベース(移動体)11とクロススライド(固定体)7との間に介在させる。NC装置(制御装置)39は、ベース11をクロススライド7に対して下方に移動させる際に、ベース11に対する毎回の移動距離の指令を監視し、第1距離Lよりも短い移動距離の指令が所定値Nだけ連続し、且つ、(N+1)回目の指令が第1距離Lよりも短い移動距離である場合は、(N+1)回目の指令を実行するのに先立ち、ベース11を第2距離Mだけ上方に移動させ、その後、(N+1)回目の移動距離の指令に基づく位置にベース11を移動させる。
(もっと読む)
数値制御装置

【課題】送り軸反転時からロストモーション補正完了時までの間に送り軸の移動状態が変化し、送り軸の速度変化が一定でなくなる場合にも、発生する送り軸反転時の飛び越しや追従遅れ等の追従誤差を抑制する。
【解決手段】反転時の送り軸の加速度に応じて求めた速度あるいはトルク補償量に対し、反転前後の送り軸移動状態を検出し、反転前後の送り軸移動状態に応じて所定のルールで係数を算出し、該係数を前記送り軸の速度反転以降の加速度により求められるロストモーション補正量に乗算し、実ロストモーション補正量を演算する補正量算出手段を具備し、算出された実ロストモーション補正量を用いて送り軸制御部による実ロストモーション補正を行う。
(もっと読む)
回転工具タレットを備えたタレット旋盤
【課題】回転工具を装着可能なタレットを備えた旋盤に関し、機械の熱変形による加工誤差を、より高精度に補正することが可能な技術手段を得る。
【解決手段】回転工具タレットの各工具ステーション毎に補正値を演算する。タレットの各工具ステーションにおける工具の回転履歴を個別に検出して、各工具ステーション毎に異なる補正値を演算するか、または、タレットの円周方向に等間隔に温度センサを設置して、タレットの周方向の温度分布から各タレット毎の補正値を演算する。各工具ステーションの補正値を演算するには、その工具ステーションの回転履歴に加えて、少なくとも隣接する複数個の工具ステーションの回転履歴を、その隣接の程度と経過時間とにより重み付けして演算する。
(もっと読む)
1 - 3 / 3
[ Back to top ]