
Fターム[3C007BS14]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937) | 8自由度以上のもの (5)
Fターム[3C007BS14]に分類される特許
1 - 5 / 5
マスタスレーブマニピュレータ及び医療用マスタスレーブマニピュレータ
【課題】冗長関節を有するマスタスレーブマニピュレータであっても逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置10の操作部11に、スレーブアーム31の冗長関節の駆動量を操作者が指令するための操作部材としての第1ロール関節102を設ける。スレーブアーム31が冗長関節を有していない場合には、スレーブアーム31の全体としての逆運動学を解くことによって各関節の駆動量を求める。また、スレーブアーム31が冗長関節を有している場合には、先端の冗長関節202がないものとして逆運動学を解くことによって冗長関節202以外の関節の駆動量を求める。冗長関節202についてはマスタ操作入力装置10からの指令値に対応した駆動量とする。
(もっと読む)
ロボットアームの干渉回避方法

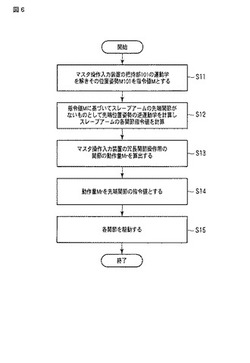
【課題】冗長性を有する多関節のロボットアームを各関節に干渉の起こらないような関節位置をとりうる全関節位置から算出し教示することなく、ロボットアームの干渉回避を行うことができるロボットアームの干渉回避方法を提供する。
【解決手段】ロボットアームを現在の姿勢から別の姿勢に移行させる際に、制御装置により予め冗長関節12,14,16の必要回転角度を演算し、この必要回転角度による各関節、各アーム及びハンドの移動予測点が進入禁止領域20に入らない場合には、前記必要回転角度を各関節の指示値として、別の姿勢にロボットアームを移行させ、移動予測点が進入禁止領域20に入る場合には、あらかじめ設定された回避動作を実行する。
(もっと読む)
多関節ロボットを備えたロボットシステム
【課題】ロボットの姿勢自由度を増しつつ、安価なロボットシステムを提供する。
【解決手段】ロボットシステム(1)は、ロボット基部(11)およびロボット基部に旋回可能に取付けられたアーム部分(12)を含む多関節ロボット(10)と、設置面に設置される設置部(21)および設置部に回転可能に取付けられた回転テーブル(22)を含む回転ユニット(20)と、アーム部分が旋回する旋回軸線と回転テーブルが回転する回転軸線とが非平行になるように、多関節ロボットのロボット基部と回転ユニットの回転テーブルとを連結する連結ユニット(30)と、多関節ロボットおよび回転ユニットを制御する制御ユニット(40)と、を具備する。
(もっと読む)
ロボットアームの姿勢教示方法および姿勢教示装置
【課題】 操作者による教示の手間と時間を低減し、ロボットアームの動作角度が不所望に大きくなることを防止すると共に、ロボットアームの姿勢の位置エネルギ等の低減を図り必要動力を小さくすることができるロボットアームの姿勢教示方法および姿勢教示装置を提供する。
【解決手段】 ハンド8を仮位置決めした後座標原点O7を算出して干渉有無を判断し、干渉ない場合関節J1,J2角度を規定し、肘部4の座標原点O4を算出する。座標原点O4等に基づき干渉有無を判断して手首角度等を算出する。
(もっと読む)
ロボットの動作経路生成装置
【課題】拘束条件を満たしかつ様々な評価条件の最適化を図ることが可能な関節ロボットの動作経路を生成することができるロボットの動作経路生成装置を提供することを課題とする。
【解決手段】力学的拘束を伴う関節ロボットの動作経路を生成するロボットの動作経路生成装置1であって、ロボットの拘束条件を取得する拘束条件取得手段3と、ロボットの評価条件を取得する評価条件取得手段3と、拘束条件を満たすロボットの姿勢を複数生成する姿勢生成手段5と、評価条件に基づいて姿勢生成手段5で生成した複数の姿勢をそれぞれ評価する姿勢評価手段6と、姿勢生成手段5で生成した複数の姿勢の中から姿勢評価手段6での評価結果に基づいて姿勢を選択する姿勢選択手段6と、姿勢選択手段6で選択した姿勢を用いてロボットの動作経路を生成する動作経路生成手段7とを備えることを特徴とする。
(もっと読む)
1 - 5 / 5
[ Back to top ]