
Fターム[3C007BT00]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749)
Fターム[3C007BT00]の下位に属するFターム
手首軸 (426)
ハンド部を移動させるもの (155)
多自由度に回動するもの (102)
フローティング機構 (61)
Fターム[3C007BT00]に分類される特許
1 - 5 / 5
ワーク搬送装置およびワーク搬送方法
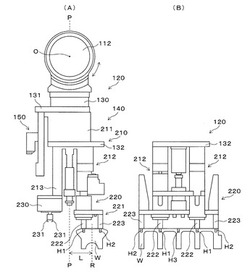
【課題】台車の側壁に隣接するワークが傾いている場合でも、そのワークを把持部で確実に把持することができるワーク搬送装置およびワーク搬送方法を提供する。
【解決手段】ワーク用ハンド部220の把持部221の中心部が、回動部112の回転軸Oから第1アーム部211の他端部に向けて延在する中心軸線Pから所定間隔Lをおいて配置されている。把持部221の中心線Rと第1アーム部211の中心軸線Pとの間隔Lを適宜設定することにより、第1アーム部211および第2アーム部212と台車Dの側壁D1との間の間隔を大きく設定することができる。図4に示すように、台車Dの側壁D1に隣接するワークWの姿勢が傾いている場合、第1アーム部211および第2アーム部212を台車Dの側壁D1に対して傾斜させても、第1アーム部211および第2アーム部212は台車Dの側壁D1と干渉しない。
(もっと読む)
駆動力解放装置

【課題】歯付部材を任意の方向へ制動したり駆動力を解放して自由移動可能にしたり駆動して移動させたりし得るようにすることにある。
【解決手段】第1ワンウェイクラッチ1と、第1ワンウェイクラッチの第1部材に出力軸を結合された第1モータ3と、第1ワンウェイクラッチの第2部材に結合された第1歯車5と、第2ワンウェイクラッチ2と、第2ワンウェイクラッチの第1部材に出力軸を結合された第2モータ4と、第2ワンウェイクラッチの第2部材に結合された第2歯車6と、第1歯車および第2歯車と噛合する歯付部材7とを具えてなる駆動力解放装置である。
(もっと読む)
ロボットおよびその制御方法
【課題】部品組立の時間が短縮でき、生産性の高いロボットおよびその制御方法を提供すること。
【解決手段】ハンド部165の指部166で第1の部品210を把持する際に、摂動アクチュエーター164によって摂動トルクを与えながら把持作業を行うことができ、ハンド部165の指部166と第1の部品210とがよく馴染み、第1の部品210の把持精度を向上することができる。
(もっと読む)
物体入れ換え装置および物体移動装置
【課題】同一平面内において物体の位置入れ換えを効率的に行って、複数の物体の任意位置への移動を可能とする。
【解決手段】移動機構ビーム5a,5bの交点に配されたスライダ19aに、回転軸7aを介して物体搭載部11aを持つ入れ換え機構13aを連結する。移動機構ビーム6a,6bの交点に配されたスライダ19bに、回転軸7bを介して物体搭載部11bを持つ入れ換え機構13bを連結する。スライダ19a,19bの移動により、物体12a,12bが移動する。入れ換え機構13a,13bは、凸型接続部9aと凹型接続部9bの嵌合により連結可能とされている。この連結状態で、物体搭載部支持機構10が、物体搭載部11a,11bを支持した状態で回転し、物体搭載部11a,11b、従って物体12a,12bの位置入れ換えを行う。入れ換え機構13a,13bの干渉による影響を受けずに、物体12a,12bを任意位置に移動できる。
(もっと読む)
水平多関節型ロボット
【課題】 作業軸の上下を使い分けられるようにすることにより、1種類のロボットで様々なワークの搬送形態、種類等に対応できるようにした水平多関節型ロボットを提供する。
【解決手段】 関節軸14、16により連結された複数の水平アーム15、17を有し、そのうちの先端アーム17の先端部に設けられた作業軸18が、上下両端部にエンドエフェクタの取付部18b、18cを有するものとする。
(もっと読む)
1 - 5 / 5
[ Back to top ]