
Fターム[3C007EU20]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | 同一駆動源で各指部材が同調しないで動けるもの (7)
Fターム[3C007EU20]に分類される特許
1 - 7 / 7
把持装置
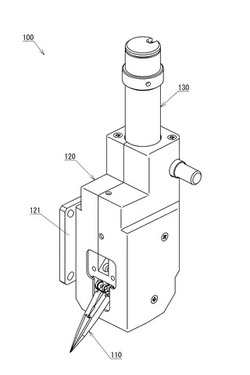
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】把持装置100は、把持部110と、本体部120と、モータ部130とを備え、取り付けプレート121によってXYZステージ等に取り付けられる。把持部110は、把持対象物を把持(狭持)するための一対のフィンガー部を備え、本体部120の内部に収容された機構及びモータ部130の内部に収容されたモータによって駆動されて、その先端が開閉することで、把持対象物を把持(狭持)する。また、把持装置100では、XYZステージ等を制御して、作業用ベース上に載置された把持対象物に対して、把持装置100全体を下降させている際に、なんらかの理由で、把持部110の先端等が、把持対象物等に接触してしまった場合、把持部110が、本体部120に対して上方に移動することができるように構成されており、それによって、把持対象物等が破損等するのを防止することができる。
(もっと読む)
ハンドおよびその動作方法

【課題】本発明は、把持対象物を破損することなくあらかじめ設定したある一定の把持力で把持でき、把持対象物の形状に倣って包み込むように把持でき、しかも比較的簡単な構成でこれを実現できるハンドを提供する。
【解決手段】基部1と、前記基部1に固定される回転駆動機構2と、前記回転駆動機構2と連結される少なくとも2つのリンク3を備えたハンドにおいて、各リンク3は関節に動力伝達部品4とラチェット機構5を有し、前記回転駆動機構2は各関節に備えられた動力伝達部品4およびラチェット機構5にベルト6を介して連結されていることを特徴とするものである。
(もっと読む)
荷重物取扱装置
【課題】経路に沿って移動する一対の可動要素と、荷重物を移動させる距離よりも長さが短い1つの線形アクチュエータとによって、経路に沿って荷重物を取り扱うのに適した装置を提供する。
【解決手段】案内経路2と、案内経路2に摺動可能に取り付けられた一対のスライド10a、10bと、スライドに設けられ荷重物を係合する係合手段7a、7bと、それぞれのスライドを個々に案内経路2に沿って所定位置に維持するロック手段6a、6bと、スライドを駆動する線形アクチュエータ手段3を有する。線形アクチュエータを構成する空圧シリンダである第1部品4は一方のスライド10aを駆動し、ピストンである第2部品5aは他方のスライド10bを駆動する。線形アクチュエータ手段3と、ロック手段6a、6bとを制御することで係合手段7a、7bを任意の位置に移動することが可能である。
(もっと読む)
ディスクチャック機構およびディスクハンドリングロボット
【課題】
磁気ディスクあるいはそのサブストレートをカセット等から取出あるいはカセット等へ収納する時にディスクへのダメージを低減するとともに高速なディスクのチャックあるいはその開放が可能なディスクチャック機構およびディスクハンドリンクロボットを提供することにある。
【解決手段】
この発明は、第1,第2、第3のリンク部材により構成されるリンク機構がスライダクランク機構を形成し、エアーシリンダ等の進退アクチュエータの駆動で第3のリンク部材が回動してこれに設けられたチャック爪を第1のリンク部材あるいは第2のリンク部材の長手方向からこれに対して直角の方向に突出させる。直角の方向に突出したチャック爪は、ディスクに係合することでその回動が停止し、さらなる第2のリンク部材の前進あるいは後退移動によりばね部材が撓み、第1のチャック爪がディスクとの係合を維持する方向に第1のチャック爪をばね部材が付勢する。
(もっと読む)
流量制御弁およびこれを用いた流体圧駆動機器
【課題】小型であり、簡素な構造で、2個の流体圧駆動機器の作動のタイミングを制御する為の流量制御弁の提供と、この流量制御弁を組み込んだ流体圧駆動機器を提供すること。
【解決手段】本体内に各流体機器側接続部への流体経路を隔てる為のボールを、ニードルの軸方向に往復動自在に封入しているニードルを挿入してあり、流体源側接続部から流体が供給された場合には、まずニードル内部のボールが第2の流体機器側接続部への流体通路を塞ぎ、別の流体通路を通り第1の流体機器側接続部へ流れ、第1の流体機器側接続部に接続された流体圧駆動機器に流体が満たされると、本体とニードル先端による絞り部を通り、第2の流体機器側接続部へ流れ、2個の流体機器側接続部の作動のタイミングをずらすことができる。
(もっと読む)
ロボットハンドとその把持制御方法
【課題】コンパクトな構造でありながら把持形態の自由度が高く、しかも把持対象物の形状汎用性に優れたロボットハンドを提供する。
【解決手段】一対のフィンガー3A,3Bの根元側の関節4a,4bに差動歯車装置9a,9bとクラッチ8a,8bとプーリ10a,10bを、指先側の関節6a,6bにクラッチ12a,12bとプーリ13a,13bをそれぞれ介装し、プーリ10a,13a間と10b,13b間にベルト21を巻き掛ける。差動歯車装置9a,9bが共有する単一の主差動歯車装置14とこれを駆動するモータ15を設ける。各差動歯車装置9a,9b,14はクラッチを内蔵していて、主差動歯車装置14の出力を二つの根元側差動歯車装置9a,9bに分配しながら各クラッチをON−OFF制御して、対象物の把持とその開放とを行う。
(もっと読む)
ワークチャック装置及び方法
【課題】 ワークを把持して搬送する際にワークに損傷を与えることを防止できるワークチャック装置及びその方法を提供する。
【解決手段】 本発明のワークチャック装置は、ワークを狭持する把持部と、該把持部を、ワークを狭持する位置及び前記ワークを解放する位置に移動させるアクチュエータと、を備え、アクチュエータが固定され、ワークを把持した状態で、把持部が所定の直線の方向に変位することを許容する第1の変位許容部と、直線を含む二次元平面を想定した場合に、該二次元平面に平行で且つ直線に対して垂直の方向に把持部が変位することを許容する第2の変位許容部とが設けられている。
(もっと読む)
1 - 7 / 7
[ Back to top ]