
Fターム[3C007HT29]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 歯車 (480) | 遊星歯車 (150) | ボール減速機 (4)
Fターム[3C007HT29]に分類される特許
1 - 4 / 4
ワーク搬送ロボットおよび搬送方法
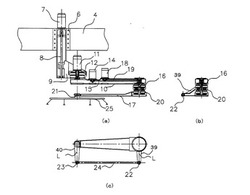
【課題】 本発明は、ワーク搬送ロボットを大型化することなく、高速搬送を可能とするハンドリングロボットを提供するものである。
【解決手段】水平に回転可能な第1アーム10と、前記第1アーム10の先端に前記第1アーム10の回転軸と平行な軸に回転支持された回転可能な第2アーム17と、前記第2アーム17の先端部に前記第2アーム17の回転軸と平行な軸に回転可能なフランジ21と、前記フランジ21にワーク把持部25とを備えたワーク搬送ロボットにおいて、前記第1アーム10の回転軸と平行な前記軸に少なくとも2つの出力軸を備えた減速機構16,20を備えたものである。
(もっと読む)
歩行ロボット

【課題】不整地等の環境の好ましくない床面上を歩行可能な脚式の歩行ロボットにおいて、歩行に要する消費エネルギーを可及的に抑制するとともに、ロボットの安定性を確保する。
【解決手段】複数のリンク部材と該リンク部材の各々を連結する関節部とで構成される脚を少なくとも三本有し、該脚の駆動により床面上の歩行を行う歩行ロボットであって、脚60A、60B、60Cが接続される胴体部601と、脚の関節部を駆動する駆動手段と、胴体部に設けられ、床面と接触し該胴体部を支持可能とする支持部60a、60b、60cと、駆動手段によって脚の関節部を駆動して床面の歩行を行うとともに、該歩行のサイクルにおいて支持部により胴体部が支えられる状態を所定割合迎えるように脚の駆動を行う歩行制御手段と、を備える。
(もっと読む)
荷重補償機構
【課題】多数の質量に対して容易に対応することのできる荷重補償機構を提供する。
【解決手段】荷重補償機構1は、基台2と、該基台2に一端側が回転軸3で回動可能に取付けられ他端側で被運搬体4を支持する作動アーム5と、該作動アーム5の先端部に一端が固定端9として取付けられているとともに前記作動アーム5の略中央部の基準点11を経て他端が前記作動アーム5の作用点10に取付けられているバネ機構6と、を備えていて、前記作動アーム5および被運搬体4のトルクを前記作動アーム5の傾斜角度に拘わらず前記バネ機構6の弾性力により補償する。前記回転軸3から前記作用点10までの距離hを作用点位置移動操作機構21により増減可能にした。
(もっと読む)
産業ロボットの関節部に取り付けられる減速機
【課題】ロボットの高速運転化等に伴い、減速機の高熱発生に起因して寿命が短くなる。
【解決手段】産業ロボットの関節部の減速機100は、第1段減速機構10が平歯車式減速部、並びに第2段減速機構30が偏心揺動式減速部からなり、偏心揺動式減速部からの出力が前記内歯歯車体または前記支持体から取り出される減速機100であって、前記第1入力歯車部への入力回転数が2000RPM以上であるときに、該偏心揺動式減速部からの出力を20RPM以上として回転させる産業ロボットの関節部に取り付けられる減速機において、前述の偏心揺動式減速部からの出力を20RPM以上として回転させているときに前記各々のクランク軸が1000RPMを超えないよう回転するように、前記第1段減速機構の減速比が選択されている。
(もっと読む)
1 - 4 / 4
[ Back to top ]