
Fターム[3C007LW15]の内容
マニピュレータ、ロボット (46,145) | 具体的な制御方法 (336) | ニューラルネットワーク (20)
Fターム[3C007LW15]に分類される特許
1 - 20 / 20
問題解決システム、問題解決支援装置及び問題解決方法
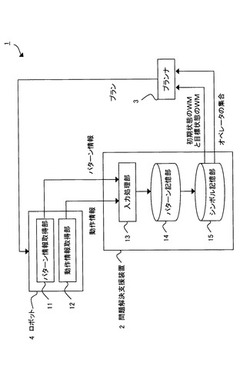
【課題】知能発達システムに要求される性質を満たす実世界における一般問題解決システムを提供する。
【解決手段】 ロボットと問題解決支援手段とプランナとを備える。問題解決支援手段は、入力層とパターン記憶層とシンボル記憶層とを有し、記号接地フェーズでは、パターン情報の種類に応じた自己増殖型のニューラルネットワークを用いて概念情報が対応付けられたパターン情報を学習し、知識獲得フェーズでは、ロボット自身の行動の前後の実環境でそれぞれ取得したパターン情報から変化前後の環境モデルをそれぞれ取得して、前提条件と削除リストと追加リストとロボットの動作情報とを含むオペレータを生成し、問題解決フェーズでは、タスクの初期状態及び目標状態をプランナに入力してプランニングをし、プランナが出力するプラン中の動作情報に応じた動作をロボットに実行させる。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム

【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
ロボット装置におけるスキーマの学習と使用
【課題】環境との相互作用時の挙動に優れた自律移動ロボット制御方式を提供する。
【解決手段】スキーマを使用し、該スキーマは、ロボットが設定されたゴールを達成するようにするための、パラメータで表した運動指令の系列の集合であって、該系列のためのパラメータは、該ロボットコントローラの状態変数から得られ、該ロボットコントローラへ知覚入力を供給するためのインタフェースと、スキーマ認識モジュールからの入力、または逆方向モデルモジュールからの入力、またはそれらの組み合わせを供給されるスキーマ状態メモリと、状態変数及び格納されたスキーマに基づいて、運動指令を生成する逆方向モデルと、状態変数及び格納されたスキーマに基づいて、状態変数を予測する順方向モデルと、該ロボットコントローラによって制御された該ロボットの、供給された状態変数に基づいてスキーマを選択するスキーマ認識モジュールと、を備えた。
(もっと読む)
触行動認識装置及び触行動認識方法、情報処理装置、並びにコンピューター・プログラム
【課題】機器が外環境と1以上の箇所で接触した際に特定の触行動を認識する。
【解決手段】前処理として、複数の接触点をクラスタリングし、1つのパターンとみなせる接触点を群として抽出し、さらに各接触点群について複数の特徴量を抽出する。次いで、自己組織化マップを重層的に用いることによって、非線形且つ組み合わせ可能な触行動認識を行なう。全身に触覚を分布させたロボットに対する接触インタラクションや接触検出デバイスを介して、複数の指の特徴的な動きによる機器操作に適用することができる。
(もっと読む)
ロボット装置の制御方法及びロボット装置
【課題】ロボット装置のマニピュレータを制御するにあたり、多くの基準画像を用意する必要がなく、計算負荷が軽く、迅速な制御が可能でありながら、マニピュレータの対象物に対する位置及び姿勢を3次元空間内において制御することができるロボット装置の制御方法を提供する。
【解決手段】事前に取得してある対象物101の平均画像3aとマニピュレータ1の動作中にカメラ6により取得した対象物101の画像との差分から、画像処理部3bにより主成分分析により特徴量を算出し、この特徴量を動作指令生成部3cに入力し、この動作指令生成部3cに制御されたニューラルネットワーク3dの出力を指令信号とし、この指令信号に基づいてマニピュレータ1の先端5を対象物101に対する所望の位置姿勢へ動作させる。
(もっと読む)
制御装置および方法、並びにプログラム
【課題】センサの故障に対してロバストな制御を可能にする。
【解決手段】予測部112は、学習したダイナミクスに基づいて、過去の複数のタイミングの高次元の修正データから、それより後のタイミングの高次元の入力データを予測した予測データを生成し、回帰部103は、予測データを回帰し、修正データ生成部101は、入力データと回帰された予測データとを合成して修正データを生成し、縮約部111は、高次元の修正データの次元を縮約して、入力データより低次元の、制御対象の動作を制御するための位相データを生成する。本発明は、例えばロボットやモータの制御に適用することができる。
(もっと読む)
ロボットおよびロボットの制御装置と制御方法
【課題】 物体の表面性状に応じて把持動作を調節できるロボットを具現化する。
【解決手段】 物体を把持するロボットであって、少なくとも2本の指部を有するハンド部と、指部が物体から受ける接触力を測定する接触力測定手段と、指部が物体表面で摺動した際に接触力測定手段によって測定される接触力の振動周波数を測定する周波数測定手段と、周波数測定手段によって測定された振動周波数に基づいて、ハンド部が物体を把持する把持動作を調節する把持動作調節手段を備えている。
(もっと読む)
計測装置及びキャリブレーション方法
【課題】比較的小型かつ安価な測定装置を使用し、高精度かつ自動的に機構パラメータの誤差を求めて機構パラメータを補正するための計測装置及びキャリブレーション方法を提供する。
【解決手段】カメラ4の受光面上において、ターゲット6のマーク画像7aを表す楕円とマーク7の形状を表す円との中心位置の差及び長軸長と直径との差が所定の誤差以内となるようにロボットを移動させる処理が、複数の計測位置について自動的に実行される。
(もっと読む)
歩行ロボット及びその制御方法
【課題】 歩行ロボットの固有周波数に合う歩行パターンを生成し、その生成された歩行パターンによって脚部の駆動部の剛性を調節することで、エネルギー効率の高い歩行を行える歩行ロボット及びその制御方法を提供する。
【解決手段】 複数の脚部と、前記複数の脚部にそれぞれ設けられて各脚部を駆動する駆動部と、前記複数の脚部にそれぞれ設けられて各脚部の駆動状態を検出する検出部と、予め設定された制御因子を用いて歩行パターンを生成する歩行パターン生成部と、前記歩行パターンによって駆動される前記複数の脚部の駆動状態によって前記駆動部の剛性を調節する剛性調節部と、を含んで歩行ロボットを構成する。
(もっと読む)
脚式ロボットの歩行制御方法
【課題】 脚式ロボットの歩行制御に関して目標の歩行方向及び歩行速度に追従することが可能で,かつ少ない計算処理で自在な歩行が行える脚式ロボットの歩行制御方法を提供する.
【解決手段】 脚式ロボットの加減速,歩行に伴う体幹の横揺れ,重心等の高さを制御するために必要となる力を個別に求め,それらの力にロボットの姿勢を加味して歩行中の支持脚の伸長力の制御を行う.その際目標の歩行方向に沿った鉛直面をSagittal面として定義する.また遊脚の着地に関して目標の歩行速度と現在の速度との偏差等を用いて遊脚の着地目標位置を決定する.
(もっと読む)
制御システム、記録システム、情報処理装置および方法、プログラム、並びに記録媒体
【課題】制御における通信や処理の遅延や環境の変化に対する耐性を向上させ、制御の負荷や破綻を抑制することができるシステムを提供すること。
【解決手段】ユーザは、スレーブ13と幾何形状が同一のロボットのマスタ12を操作し、制御装置11を介してスレーブ13を制御する。制御装置11は、マスタ12の操作により生成されるスレーブ13に対する制御コマンドを、その制御コマンドの生成タイミングにおいてスレーブ13より供給されるセンサ情報とともに、システム内に生じる制御遅延を含む形で記録する。制御装置11は、その制御コマンドとセンサ情報とに基づいて、制御遅延を考慮した時系列的に先の制御コマンドを予測し、その制御コマンドによりスレーブ13を制御する。本発明は、情報処理システムに適用することができる。
(もっと読む)
ロボットとロボットの制御方法
【課題】 把持する物体の形状等を正確に把握することなく、物体を把持することができるロボットを具現化する。
【解決手段】 物体を把持するロボットであって、少なくとも2本の指を有するハンド部と、各指に少なくとも一つずつ配設されており、各指の所定箇所と把持対象物との接触を検出する接触センサ群と、少なくとも把持対象物の形状を記述する形状情報を入力し、ハンド部が把持対象物を把持したときに接触センサ群が出力する信号群を予測する予測手段と、接触センサ群から出力されている信号群が、予測手段によって予測された信号群に等しくなるように、各指の動作を制御するハンド制御手段とを備える。
(もっと読む)
ロボット制御装置
【課題】ロボットが動作の切り替えを安定しておこなうことができるよう効率的に制御すること。
【解決手段】ロボットの動作が現在ロボットがおこなっている第1の動作から第2の動作に切り替えられる。2つの動作におけるロボットの姿勢は、異なる複数の時点における複数のフレームを用いてあらかじめ定義される。第1の動作から第2の動作に動作が切り替えられる場合には、第2の動作のフレームに係る情報が取得され、取得された情報に基づいて、切り替え後のロボットの姿勢が制御される。
(もっと読む)
ロボット制御装置
【課題】ロボット自身やロボットの周囲環境のモデリングを不要としつつ、ロボットがさまざまな運動を安定しておこなうこと。
【解決手段】ロボット110の動作は複数の時点における複数のフレームP0〜P11により定義される。これらのフレームは、複数のリファレンスフレームP1,P6,P11を含んでいる。リファレンスフレームP1,P6,P11では、ロボット110は、転倒することなく単独で立っている。他のフレームのデータ、すなわち、リファレンスフレーム以外の他のフレームは、ロボット110が歩行を開始する前には大まかに設定される。ロボット110が歩行を開始すると、他のフレームの大まかに設定されたデータは、大まかに設定されたデータやリファレンスフレームのデータを基にして算出される制御情報に基づいて補正される。
(もっと読む)
ハイブリッド制御デバイス
ロボット用ハイブリッド制御システムは、ニューロン制御部分と非ニューロン制御部分とを含むことができる。 (もっと読む)
特殊目的プロセッサを使用する神経モデリング及び脳ベースの装置
特殊目的プロセッサ(SPP)は、現場でプログラム可能なゲートアレー(FPGA)又は同様のプログラム可能な装置を使用して、多数の神経素子をモデリングする。FPGAは、前シナプス計算、後シナプス計算及び塑性計算を並列に行なう複数のコアを有することができる。各コアは、神経モデルの複数の神経素子を実施することができる。 (もっと読む)
音声移動制御装置および音声移動制御方法
【課題】 音声認識の精度を向上可能な音声移動制御装置を提供する。
【解決手段】 音声移動制御装置は、音声入力部11と、音声語彙認識部12と、移動制御部13とを備えている。音声語彙認識部12は、音声辞書14と、状態遷移ルール辞書15と、音声入力部11に入力された音声が複数の移動制御コマンドに適合する確率を計測する確率計測部16と、移動ロボットの環境状況に応じて設定される複数の移動制御コマンドの発行確率に基づいて確率計測部16で計測された確率を修正する確率修正部17と、計測された確率に基づいて入力音声に対応する移動制御コマンドを決定するコマンド決定部18とを有する。移動ロボットの種々の環境条件に基づいて、複数の移動制御コマンドの発行確率スコアを設定し、これら発行確率スコアに基づいて、音声辞書14を用いて設定した音声スコアを調整して最終的な総合語彙認識結果スコアを得るため、音声語彙認識の誤認識率を確実に低減できる。
(もっと読む)
二足歩行ロボット
【課題】設計時間の短縮と設計精度の向上に役立つ運動パターンと機構設計とが同時に設計され、二足歩行をするための立体部品の運動パターンを生成するためにニューラルネットワークを備えた、二足歩行ロボットを提供する。
【解決手段】二足歩行ロボット120は、二足歩行をするための複数の立体部品100と、立体部品100の運動パターンを生成するためのニューラルネットワークと、を、備え、ニューラルネットワークは、各立体部品100に対応するニューロンからなり、組となって正のフィードバックを持つ発信回路として動作するニューロンと、運動パターンを生成するために周期的信号を発生する信号発生手段と、を有している。運動パターンは、遺伝的アルゴリズムによる進化的計算法により求めることができる。ニューラルネットワークにより二足歩行ロボット120の適切な運動パターンを容易に生成することができる。
(もっと読む)
ロボット制御アルゴリズム構築装置、ロボット制御アルゴリズム構築プログラムロボット制御装置、ロボット制御プログラム、およびロボット
本発明は、ロボットの運動を制御する制御アルゴリズムを構築する装置やその構築された制御アルゴリズムにしたがってロボットの運動を制御する装置等に関し、従来のMZP法等、力学的な方程式を解く方式と比べ制御アルゴリズム作成のコストや時間を大きく下げることを目的とし、入力に対すアナログ的な時間遅れを伴う出力を生成するニューロンを含むリカレントニューラルネットワーク(RNN)により制御アルゴリズムを構成し、そのRNNの係数を低次の項から高次の項に向かって順次決定していく。  (もっと読む)
(もっと読む)
ロボットシステム
【課題】 ロボットシステムにおいて、計算機にかかる負荷を軽減し、また特定自由度への外乱の影響を協調的に調整することを可能とし、全体としての移動運動などパフォーマンスを安定維持することができるようにする可能とする。
【解決手段】 個々にアクチュエータを備えた複数の構造体からなり、各アクチュエータの自由度毎に対応して設けた複数の計算機を備える。各アクチュエータの計算機は通信ネットワークを介して結合し他のアクチュエータのセンサ情報を含む他の計算機の内部状態を取得する。各計算機には、各自由度の運動制御のため非線形振動子モデルを備え、前記非線形振動子モデルは他の計算機からの周期パターン入力に対して、自律的に振動周期を合わせ、また結合係数により決まる位相差を協調的に生成する。また全てのネットワーク結合されている計算機内で共有されたメモリを個々に備え、常に通信を介して更新する。
(もっと読む)
1 - 20 / 20
[ Back to top ]