
Fターム[3C007WB05]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 歩行制御 (469) | 歩容、歩行パターンの生成 (94)
Fターム[3C007WB05]に分類される特許
1 - 20 / 94
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
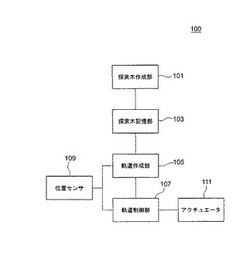
【課題】物体の種々の初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コストで求めることのできる軌道計画システム、及び求めた軌道にしたがって目標状態までの軌道を制御することのできる軌道計画・制御システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、該目標状態に至るまでの状態を枝として、予め区分された状態空間の複数のセルのそれぞれに一つの枝を有する探索木を予め作成する探索木作成部(101)と、該探索木を記憶する探索木記憶部(103)と、該物体の現在の状態を求め、該現在の状態に対応する該探索木の枝を求め、該現在の状態に対応する該探索木の枝から該根までの探索木上の経路を、物体の軌道として求める軌道作成部(105)と、を備える。軌道計画・制御システムは、さらに目標状態までの軌道を制御する軌道制御部(107)を備える。
(もっと読む)
歩行支援装置

【課題】ユーザがイメージする歩行動作とうまく同期して脚装具を揺動することができる歩行支援装置を提供する。
【解決手段】歩行支援装置は、脚装具とアクチュエータとコントローラを備える。脚装具は、ユーザの大腿と下腿に夫々装着される大腿リンクと下腿リンクが回転ジョイントによって揺動可能に連結されている機構を有する。アクチュエータは、回転ジョイントの回転軸周りに下腿リンクを揺動させる。コントローラは、下腿リンクの揺動角が、遊脚膝角度の一歩分の経時的変化を記述した目標パターンに追従するようにアクチュエータを制御する。コントローラは、脚装具を装着した脚の足の腰位置に対する前後方向相対位置が、腰位置よりも第1距離閾値以上前方に移動した後に、腰位置よりも第2距離閾値以上後方に移動したことを条件として、前記目標パターンへの追従制御を開始する。
(もっと読む)
脚式歩行ロボット及びその足軌道決定方法
【課題】アクチュエータへの負荷が過大とならないように脚式ロボットの足軌道を決定する方法を提供する。
【解決手段】本明細書が開示する脚式歩行ロボットの足軌道決定方法は、経路決定ステップと一歩時間決定ステップを含む。経路決定ステップは、足の離地位置から着地位置に至る足の移動経路を決定する。一歩時間決定ステップは、足が離地してから着地するまでに要する一歩時間として、移動経路の長さを足の平均移動速度で除した値を求める。決定された移動経路と一歩時間が足の軌道に相当する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの実際の姿勢と目標とする姿勢とのずれを低減するように実際の該ロボットに作用させる床反力を操作することが過剰に制限されるのを防止し、該床反力の操作によって該姿勢のずれを低減することの効果を高める。
【解決手段】脚式移動ロボット1の実際の姿勢と目標とする姿勢とのずれの程度を表す姿勢状態量偏差を“0”に近づける機能するフィードバック操作量としての実ロボット外力操作量に応じて床反力を操作したと仮定した場合の全床反力中心点(制限前補償ZMP)が、ロボット1の複数の脚体2が着床状態となる期間内において方形状と異なる形状の領域に設定した存在許容領域を逸脱する場合に、全床反力中心点が存在許容領域のうちの制限前補償ZMPに最も近い位置(制限後補償ZMP)になるように、実際の床反力の目標を決定する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの実際の姿勢と目標とする姿勢とのずれの低減に寄与しない床反力成分が発生するのを極力防止するように床反力を操作する。
【解決手段】脚式移動ロボット1の実際の姿勢と目標とする姿勢とのずれの程度を表す姿勢状態量偏差を“0”に近づける機能するフィードバック操作量としての実ロボット外力操作量に応じて床反力を操作したと仮定した場合の全床反力中心点(制限前補償ZMP)が、存在許容領域を逸脱する場合に、実ロボット外力操作量が“0”であると仮定した場合の全床反力中心点の目標位置(目標ZMP)と制限前補償ZMPとを結ぶ線分と、存在許容領域の境界線との交点が、全床反力中心点(制限後補償ZMP)となるように、実際の床反力の目標を決定する。
(もっと読む)
二脚型移動装置
【課題】人間が暮らす住環境に存在する障害物をスムースに跨ぎ越すことのできる二脚型移動装置を提供する。
【解決手段】角度自在に屈折可能な膝関節を有する第1および第2の脚と、第1および第2の脚の根元の関節(腿関節)をそれぞれ回動自在に支持する臀部10と、前記膝関節の屈折角度および前記腿関節の回転角度をそれぞれ制御して、進行方向の床上に設けられた凸状の障害物を跨ぎ越す跨ぎ越し制御手段と、を備える。跨ぎ越し制御手段は、第2の脚を障害物の後方側に接地させた状態で第1の脚を前記障害物の上方へ振り出して該障害物を跨ぐ場合に、第2の脚の膝関節を後方へ突出させた姿勢(逆膝の姿勢)に制御する。好ましくは、第1および第2の脚の先端に設けられた第1および第2の車輪機構による走行を併用することにより、等速で走行しながらのスムースな跨ぎ越しを行う。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの運動中に、複数の必要条件を満足させることが可能となる各脚体の先端部の運動軌道を効率よく決定しつつ、前記複数の必要条件を満足させる目標歩容を生成する。
【解決手段】脚式移動ロボット1の脚体2のうちの遊脚の先端部(足平22)の目標着地位置の第1着地許容領域と第2着地許容領域とを決定し、これらの着地許容領域が重なり合う領域に目標着地位置を決定し、ロボットの目標歩容を生成する。第1着地許容領域は、幾何学的脚体運動必要条件を満足するように決定される。第2着地許容領域は、床反力の構成要素である所定の床反力要素に係わる運動系属性必要条件と床反力要素許容範囲条件とを満足させ得るように決定される。
(もっと読む)
逆運動学を用いた動作・姿勢生成方法及び装置
【課題】
多自由度リンク系において、各々のリンクとの対応付けを全く必要としない形状情報を入力として逆運動学計算を行う。
【解決手段】
多リンク系モデルの形状を決定する一般化座標を逆運動学により取得する動作・姿勢生成方法である。形状を表す特徴量を参照値とし、形状を表す特徴量は、幾何学的な形状を形成する複数の第1特徴点の位置情報から計算された第1の高次特徴量であり、多リンク系モデル上には、当該モデルの特定のリンクと夫々関連付けられた複数の第2特徴点が定義されており、複数の第2特徴点の位置情報から第2の高次特徴量を計算し、第2の高次特徴量と第1の高次特徴量との差を最小化するように、第2の高次特徴量、第2の高次特徴量の一般化座標に対するヤコビ行列、一般化座標を数値計算により更新することで、多リンク系モデルの一般化座標を取得する。
(もっと読む)
ロボットおよび制御システム
【課題】
連続状態変数および離散状態変数の組み合わせ最適化問題の解導出の高速化を図ることができる制御システム等を提供する。
【解決手段】
内部モジュールmod1による行動候補ai1の探索範囲(第1探索範囲)は、低周波の外部モジュールmod2による外部行動候補ai2の探索範囲(第2探索範囲)よりも狭くすることで、その分だけ演算処理が早くなる。これにより、ロボットRの状態測定値に鑑みて、ロボットRが外乱に緊急に対応する必要がある場合、低周波の外部モジュールmod2の演算処理結果を待たずに、高周波の内部モジュールmod1の演算処理結果にしたがってロボットRの動作が制御されうる。
(もっと読む)
2足移動ロボットの制御装置及び歩容生成装置
【課題】2足移動ロボットに片脚ホッピング動作を行なわせるときに、離床・着床動作を行なう脚体の基端部の関節に大きなモーメントが作用するのを防止する。
【解決手段】片脚ホッピング動作を2足移動ロボット1に行わせるとき、離床・着床動作を行なう脚体2(支持脚側脚体2)の離床後の着床状態において、支持脚側脚体2の基端部よりも、支持脚側脚体2と異なる脚体2(遊脚側脚体2)の基端部の方が相対的に高い位置に存在するように、ロボット1の目標運動(上体24の目標姿勢)を生成する。
(もっと読む)
2足移動ロボットの制御装置
【課題】各脚体の離床・着床動作を2つの脚体で交互に行なう動作によって、2足移動ロボットの継続的な運動を行なうことが困難となる状況でも、該ロボットの継続的な運動を行ない得るようにすることを可能とする。
【解決手段】2足移動ロボット1の動作モードは、両脚交互離床・着床動作モードと片脚ホッピング動作モードとを有する。両脚交互離床・着床動作モードでの動作中に、該動作モードでのロボット1の運動を継続させる目標歩容を生成可能であるか否かを判断する(S040)。この判断結果が否定的となる場合に、動作モードを片脚ホッピング動作モードに変更することによってロボット1の運動を継続させる目標歩容を生成可能であるか否かを判断し(S041)、この判断結果が肯定的となる場合に動作モードを片脚ホッピング動作モードに変更して、目標歩容を生成する。
(もっと読む)
2足歩行ロボット及びその制御方法
【課題】外乱の作用時に、ハードウェアや環境の制約に則った適切な遊脚の着地位置を設定する。
【解決手段】外乱作用時の遊脚の着地位置の決定に際して、電子制御ユニット1は、ハードウェアの制約により決定される遊脚の着地可能域を第1の着地可能域として算出するとともに、環境の制約により決定される遊脚の着地可能域を第2の着地可能域として算出する。そして電子制御ユニット1は、第1及び第2の着地可能域のAND領域を抽出し、その抽出したAND領域を、外乱が作用したときの遊脚の着地可能域として演算する。
(もっと読む)
脚式ロボットの歩行着地位置計画方法
【課題】着地予定初期位置がリアルタイムに変更され得ることに適した脚式ロボットの着地予定位置計画方法を提供する。
【解決手段】この歩行着地位置計画方法は次のステップを備える。コンピュータ内に、障害物をモデル化した3次元環境モデル空間(障害物W)を構築するステップ。足平の形状モデルを3次元環境モデル空間内で路面上に配置して障害物Wとの干渉チェックを行い、障害物と干渉しない位置に着地予定初期位置f1〜f8を定めるステップ。このステップによって少なくとも2歩分の着地予定初期位置を求めた後、足平形状モデルより足平面内方向のサイズが大きい拡大足平モデル(a1等)を3次元環境モデル空間内で着地予定初期位置に配置して障害物Wとの干渉チェックを行い、路面と平行な方向にて障害物と干渉しない範囲まで拡大足平モデルを狭め(符号b4の領域を削除する)、狭めた拡大足平モデルを路面投影した着地許容範囲を定めるステップ。
(もっと読む)
学習歩行ロボット装置及びその制御プログラム
【課題】床面の状態が大きく異なりあるいは大きく変化するような領域でも安定した移動を可能とする学習歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】所定領域内のそれぞれの位置における床面の硬さ指標を測定する手段21と、それぞれの位置を表す位置情報と硬さ指標とを対応付けて硬さ情報として保存する手段41と、所定領域内の学習歩行ロボット装置の現在位置を同定する手段35と、同定された現在位置における床面の硬さ指標を硬さ情報から決定する手段36と、決定した床面の硬さ指標に基づいて歩行形態を選択して歩行動作を制御する手段22〜28とを有し、手段21は、学習歩行ロボット装置が直立した姿勢を保持したまま足首の関節ロール軸アクチュエータを駆動したときのアクチュエータに流れる電流値に基づいて、アクチュエータに流れる電流値が大きいほど床面が硬いとする硬さ指標を対応付ける。
(もっと読む)
冗長ロボットの関節目標値決定方法及び冗長ロボットの制御装置
【課題】関節数がn、先端目標値ベクトルXの次数がm(n>m)である冗長ロボットの関節目標値ベクトルθを少ない計算負荷で決定する。
【解決手段】ベクトルXを複数の部分ベクトルに分割する。各部分ベクトルに優先度を付与する。各部分ベクトルとベクトルθの間の線形関係式を求める。一の優先度kを選択し、「選択された優先度kよりも高い優先度を有する全ての部分ベクトルが線形関係式と不等式関係式の拘束条件の下で実行可能である領域が存在するか否か」を判定する(S14、S15)。その処理を異なる優先度の部分ベクトルに対して実行し、上記領域が存在すると判定された部分ベクトルのうち最も低い優先度を有する部分ベクトルについて、上記拘束条件の下で目的関数C2を最小にする凸二次計画法の解を求める(S21)。求めた解をロボットベクトルθとして決定する(S22)。
(もっと読む)
脚式移動ロボットの外力目標生成装置
【課題】複数の接触対象面からロボットに外力が作用する状況でロボットの運動を行いながら、ロボットに作用させるべき外力(並進力)の目標値を適切に決定する。
【解決手段】ロボット1の動作環境の複数の接触対象面FL,WL1,WL2を相互の姿勢関係が予め定められた仮想面S3a,S2a,S2bで近似し、これらの仮想面S3a,S2a,S2bからロボット1に作用させるべき並進力(仮想面必要並進力)を、その垂直抗力成分及び摩擦力成分に関する第1A必要条件、第1B必要条件、第2必要条件を少なくとも満足するように決定する。決定した仮想面必要並進力に基づいて、各仮想面に対応する接触対象面からロボット1に作用させるべき目標並進力を決定する。
(もっと読む)
脚式移動ロボットの歩容生成装置
【課題】複数の接触対象面からロボットに外力が作用する状況でのロボットの目標歩容を生成する場合に、ロボットに作用させるべき外力に関する目標を効率よく適切に決定する。
【解決手段】ロボット1の動作環境の複数の接触対象面FL,WL1,WL2を仮想面S3a,S2a,S2bで近似し、ロボット1全体の目標運動のうちの並進運動を実現するために、仮想面S3a,S2a,S2bからロボット1に作用させるべき並進力(仮想面必要並進力)の暫定値を決定する。さらに、ロボット1全体の目標運動のうちの回転運動を実現するために、仮想面必要並進力の暫定値と組み合わせるモーメント補償量を決定し、この仮想面必要並進力の暫定値とモーメント補償量との組に基づいて各接触対象面からロボット1に作用させるべき目標外力及び目標外力作用点を決定する。
(もっと読む)
脚式移動ロボットの運動状態評価装置
【課題】複数の接触対象面からロボットに外力が作用する状況でロボットの運動を行いながら、ロボットの運動状態を効率よく適切に評価する。
【解決手段】ロボット1の動作環境の複数の接触対象面FL,WL1,WL2を仮想面S3a,S2a,S2bで近似し、ロボット1の並進運動に係わる補償総並進外力を実現するために仮想面S3a,S2a,S2bからロボット1に作用させるべき並進力(仮想面必要並進力)を第1A必要条件と第1B必要条件とを少なくとも満足するように算出する。この仮想面必要並進力に基づいて、ロボットの運動状態を評価する。
(もっと読む)
脚式移動ロボットの目標運動評価装置
【課題】複数の接触対象面からロボットに外力が作用する状況でのロボットの目標運動を生成する場合に、生成した目標運動が適切に実現し得る目標運動であるか否かの評価を効率よく適切に行なう。
【解決手段】ロボット1の動作環境の複数の接触対象面FL,WL1,WL2を仮想面S3a,S2a,S2bで近似し、ロボット1全体の目標運動のうちの並進運動を実現するために、仮想面S3a,S2a,S2bからロボット1に作用させるべき並進力(仮想面必要並進力)を第1A必要条件と第1B必要条件とを少なくとも満足するように算出する。この仮想面必要並進力に基づいて、目標運動を評価する。
(もっと読む)
脚式移動ロボットの歩容生成装置
【課題】複数の接触対象面からロボットに外力が作用する状況でのロボットの目標歩容を生成する場合に、ロボットに作用させるべき外力(並進力)の目標値を適切に決定する。
【解決手段】ロボット1の動作環境の複数の接触対象面FL,WL1,WL2を相互の姿勢関係が予め定められた仮想面S3a,S2a,S2bで近似し、これらの仮想面S3a,S2a,S2bからロボット1に作用させるべき並進力(仮想面必要並進力)を、その垂直抗力成分及び摩擦力成分に関する第1A必要条件、第1B必要条件、第2必要条件を少なくとも満足するように決定する。決定した仮想面必要並進力に基づいて、各仮想面に対応する接触対象面からロボット1に作用させるべき目標並進力を決定する。
(もっと読む)
1 - 20 / 94
[ Back to top ]