
Fターム[3C007XG03]の内容
マニピュレータ、ロボット (46,145) | マイクロマニピュレータの構成、目的 (116) | 基台 (3)
Fターム[3C007XG03]に分類される特許
1 - 3 / 3
顕微鏡用観察装置
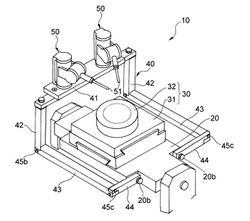
【課題】試料とマニピュレータとの相対的な位置を変えることなく、試料が載置されている試料台を容易に移動することが可能な顕微鏡用観察装置を提供すること。
【解決手段】顕微鏡用観察装置10は、少なくとも一つの可動軸を有する基台20と、基台20上に配置され、かつ基台20の有する可動軸と異なる少なくとも一つの可動軸を有する試料台30とを有する。試料を操作するためのマイクロマニピュレータ50を、連結部材40を介して基台20に取り付けて、基台20の可動軸による動作をマイクロマニピュレータ50の動作と連動させるとともに、試料台30の可動軸による動作をマイクロマニピュレータ50の動作と連動させないようにした。
(もっと読む)
マニピュレータ

【課題】軸に直交する方向の微小な並進変位と軸まわりの回転変位を与えるコンパクトで単純な機構のマニピュレータを提供する。
【解決手段】作業を行うアーム部2と、アーム部2の回転角を制御する回転角制御部3と、アーム部2の変位を制御する変位制御部4と、を備えたマニピュレータ1において、回転角制御部3は、回転駆動力を付与する回転角付与手段31を有し、アーム部2は、回転角付与手段31に接続され、回転可能であると共に、屈曲可能な屈曲軸部21と、屈曲軸部21に接続され、屈曲軸部21が屈曲することにより移動する作用軸22と、作用軸22の先端に設置され、各種作業を行う作業部23と、を有し、変位制御部4は、作用軸22に力を付与する変位付与手段41と、変位付与手段41の駆動力を伝達し、作用軸22に常に当接する出力部材42と、を有することを特徴する。
(もっと読む)
マイクロロボット
【課題】 本発明の目的はマイクロロボットなどに使用される自走機構より成る移動装置において、移動する床面状態が平面でなくとも、即ちうねり、歪曲等曲面であっても又、床面状態が平滑でなく表面粗さがあっても対応する移動装置を提供することにある。
【解決手段】 駆動された圧電素子の伸長収縮運動が確実に前脚又は後脚に伝達されるよう後脚ホルダーと中間ホルダーの両端頂部に各2個のストッパーにより固定された2枚のバネ性あるリーフスプリングが橋渡し状に配置され弾力的に接続されたことを特徴とする移動装置。
(もっと読む)
1 - 3 / 3
[ Back to top ]