
Fターム[3C042RD02]の内容
多工程加工の機械及びシステム (754) | 工作物の姿勢変換 (23) | 搬送方向を含む鉛直面内で回動 (4)
Fターム[3C042RD02]に分類される特許
1 - 4 / 4
生産装置及び生産システム
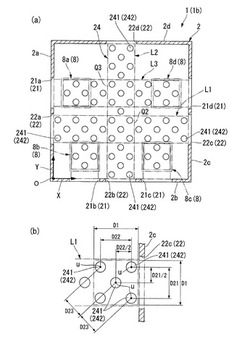
【課題】投入搬出口から作業室内に搬入された作業ユニットを装置内で容易に移動させること。
【解決手段】箱状の装置本体と、装置本体を、下側の作業準備室2と、上側の作業室とに仕切る平板状の隔壁部材と、作業準備室の内部から隔壁部材の位置まで昇降可能な可動床部8と、作業準備室内に設けられ、可動床部を昇降させる昇降機構と、可動床部に対して着脱可能に設けられ、作業を行う作業ユニットと、作業ユニットを作業準備室内に対して出し入れするために、作業準備室を外部と仕切る側壁部2a、2b、2c、2dに設けられた投入排出口22と、作業準備室内において、投入排出口と昇降機構により下降された可動床部との間の平面領域内で、作業ユニットの下面に駆動力を付勢して、作業ユニットを少なくとも2方向に搬送する搬送機構24と、を備える生産装置を提供する。
(もっと読む)
溶接ロボットシステム

【課題】加工効率が高い溶接ロボットシステムを提供する。
【解決手段】溶接ロボットシステム100は、軌条112に沿って往復運動を行う2組のポジショナ111a及び111bを有する搬送装置110と、この搬送装置110に加工対象物200を搬入及び搬出するコンベヤ部160と、加工対象物200に対し溶接を行う2組の溶接ロボット180a及び180bと、を備え、2組のポジショナ111a及び111bは、軌条112に沿って往復運動が可能で且つ旋回可能である旋回ギヤ124と、この旋回ギヤ124上に立設された支柱126と、この支柱126に沿って昇降運動が可能な昇降体139と、この昇降体139に対して垂直方向に固定された昇降フレーム140と、この昇降フレーム140の先端に取り付けられ水平方向及び垂直方向に回転可能であるエンドエフェクタと、を有している。
(もっと読む)
複合加工機および複合加工機におけるワークの搬送方法
【課題】省スペースかつ省エネルギー型の複合加工機およびワークの搬送方法。
【解決手段】工具を着脱可能な主軸2を有する加工機MC1〜4を、ベッド10に対して案内手段11を介してワーク搬送方向にそれぞれ独立して往復移動可能に複数配設し、主軸2および加工機MC1〜4をそれぞれ独立して往復移動させるための駆動手段31、32,33と、工具を貯蔵するためのマガジン41,42と、を備えた複合加工機において、ワークWを載置するテーブル6と、主軸2に着脱可能に装着されワークWを搬送するマガジン42に貯蔵された搬送アーム5と、を備え、搬送アーム5を主軸2に装着して、駆動手段31、32,33により主軸2を搬送方向に移動してワークWを搬送する。
(もっと読む)
多面加工機およびワーク位置決め装置
【課題】ワークの加工をいくつかの側面から、被加工面間の相互の寸法精度を高精度で行えるようにするための位置決め装置を備えた多面加工機を提供する。
【解決手段】本発明は、ワーク(40,40’)を加工するための少なくとも2つの加工装置(3,4,55)と、ワーク(40,40’)を締付けるための締付装置(19,19A,19B)を有する少なくとも1つの位置決め装置(7,7B〜7F)とを備えた、ワーク(40,40’)のいくつかの表面または側面を加工するための多面加工機(1,45,50)に関する。本発明によると、位置決め装置(7,7B〜7F)は、締付けたワーク(40,40’)を少なくとも2つの加工ユニット(3,4,55)の加工位置間で移動できる移動装置(15,15B,15C;16)上に配置され、さらに締付装置(19,19A,19B)を縦軸(A)および/または横軸(B)を中心に回転または枢動することができる。
(もっと読む)
1 - 4 / 4
[ Back to top ]