
Fターム[3C269CC10]の内容
数値制御 (19,287) | 被制御軸の種類、形状 (1,508) | 多関節軸 (377) | 腕の長さが可変であるもの (7)
Fターム[3C269CC10]に分類される特許
1 - 7 / 7
パラレルメカニズム機械の制御方法及び制御装置
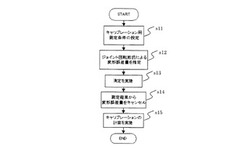
【課題】回転抵抗による機構要素の変形誤差の影響を除去し、機構パラメータの推定精度を向上可能なパラレルメカニズム機械の制御方法等を提供する。
【解決手段】パラレルメカニズム機械は、第2ユニバーサルジョイントを介してストラットと接続されるエンドエフェクタと、ストラットを駆動するアクチュエータと、アクチュエータ指令値を与えて各アクチュエータを制御する制御手段と、制御手段に備えられていて第1ユニバーサルジョイント及び/又は第2ユニバーサルジョイントの回転抵抗値を記憶可能な回転抵抗値記憶手段を備える。制御手段は、エンドエフェクタを複数の位置及び姿勢に位置決めした際に、位置及び/又は姿勢の測定、又は固定点からの距離測定を行い、その測定値を元に、パラレルメカニズム機械の機構パラメータを推定し、その計算の際、第1ユニバーサルジョイント及び/又は第2ユニバーサルジョイントの回転抵抗による変形誤差を加味する。
(もっと読む)
数値制御装置及び工作機械

【課題】機械構造の異なる各種工作機械における誤差補正システムの共通化を促進しつつ、互いに平行な移動軸を持つ複数の移動装置を含む工作機械でもその平行な移動軸を持つ各移動装置の動作の誤差補正を行えるようにすることである。
【解決手段】数値制御装置16は、数値制御プログラムからその数値制御プログラムが指示する対象物の移動位置である指令位置を読み取る指令位置読取り部26と、指令位置読取り部26によって読み取られた指令位置から機械軸毎の座標を算出する機械軸座標算出部28と、機械軸座標算出部28によって算出された機械軸毎の座標を誤差データ格納部22に格納された機械軸毎の誤差データに基づいて補正することにより機械軸毎の補正座標を算出する補正演算部30と、補正演算部30により算出された機械軸毎の補正座標に従って各駆動装置2c,6b,8b,10bに前記支持体を駆動させる駆動制御部32とを備えている。
(もっと読む)
加工精度を指標化する機能を備えた数値制御装置
【課題】大容量のハードウェア資源を必要とせず、単純な処理で精度悪化等のデータの確認が可能な数値制御装置を提供する。
【解決手段】数値制御装置10は、加工プログラムに従ってサーボモータ12に指令パルスを与えるパルス指令部14と、該指令パルスとサーボモータ12に取り付けたエンコーダ16等の位置検出器による位置フィードバックパルスとの偏差を求めて、サーボモータ12の位置ループ制御を行う制御部18と、加工プログラムの運転中に、サーボモータ12への指令パルスとフィードバックパルスとの差の絶対値を所定周期毎に積算する積算部20と、積算部20により積算された値を、加工精度を表す指標として加工プログラムと対応付けて記憶する記憶部22とを有する。
(もっと読む)
パラレルメカニズム、およびその原点復帰方法
【課題】機械的な干渉を避けながら駆動アームを適正に原点復帰できる回転型のパラレルメカニズムを提供する。
【解決手段】複数の駆動アームおよびロッドと、操作ヘッドを備えている回転型のパラレルメカニズムにおいて、駆動アームの外面に基準突起を設け、駆動アームの通常動作範囲の外に臨むベースの外面に、原点復帰操作された駆動アームの基準突起を受け止める原点体を設ける。複数個の駆動アームを個別に原点復帰操作した状態において、駆動モーターからフィードバックされる位置信号を制御回路で受け取って、複数個の駆動アームの原点位置を個別に特定する。
(もっと読む)
パラレルメカニズムにおける原点較正方法、および原点較正用の較正治具
【課題】理論上の原点位置と実際の原点位置のずれを較正して、操作ヘッドを常に的確に作動できるパラレルメカニズムの原点較正方法と較正治具を提供する。
【解決手段】操作ヘッド5を較正治具45で仮基準位置に位置決めし、そのときの駆動アーム12の位置情報を1次位置信号として制御回路63に受け渡す。次に較正治具を取り外して駆動アームのひとつを原点復帰操作し、そのときの駆動アームの位置情報を2次位置信号として制御回路に受け渡す。両位置信号から原点ピンの位置のばらつきに起因する駆動アームのオフセット量を特定して制御回路に反映させ、駆動アームの原点を較正する。較正治具は、棒状の治具主体と、治具主体に対して着脱可能に連結される上下の連結体とで棒状に構成する。以て、較正治具のベース側接合部とヘッド側接合部とを、ベース側基準面とヘッド側基準面とで挟持して、操作ヘッドを3次元空間上の仮基準位置に位置決めする。
(もっと読む)
工作機械及び工作機械における機構要素のパラメータ管理方法
【課題】パラメータの更新の有無を確実に把握して、機械精度の低下を防止する。
【解決手段】電源投入後、S100で、エンドエフェクタのICタグに格納された機構パラメータを更新した日時、及び保守作業を行った日時に係る情報を取得する。次に、S110で、演算装置において、S100で取得された更新情報と調整情報とを比較する。ここで調整情報の方が新しい場合、保守作業によって変化している機構パラメータが更新されていないものと判断して、S120でパラメータ未更新の警告メッセージを出力して、パラメータのチェック作業を終了する。
(もっと読む)
パラレルメカニズム機械の制御方法及び制御装置
【課題】 全受動軸についての回転抵抗の影響を考慮した補償をすることで、エンドエフェクタの位置や姿勢を高精度に決定可能としたパラレルメカニズム機械の制御方法及び制御装置を提供する。
【解決手段】 まず、第1ステップS1で、エンドエフェクタの位置指令値及び姿勢指令値に対する各アクチュエータ指令値を求める。次に、第2ステップS2で、第1及び第2ユニバーサルジョイントの回転抵抗値を取得し、第3ステップS3で、これを用いて各第2ユニバーサルジョイントに作用する力及びモーメントを計算し、第4ステップS4で、これらからエンドエフェクタに作用する合力及び合モーメントを求める。続いて、第5ステップで、これらを用いて機構の弾性変形量を計算し、その値を用いてアクチュエータ指令値の補償量を計算する。そして、第6ステップで、第1ステップで求めたアクチュエータ指令値について、第5ステップで求めた補償量を加味して更新する。
(もっと読む)
1 - 7 / 7
[ Back to top ]