
Fターム[3D041AF05]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | ファジー制御 (4)
Fターム[3D041AF05]に分類される特許
1 - 4 / 4
走行制御装置
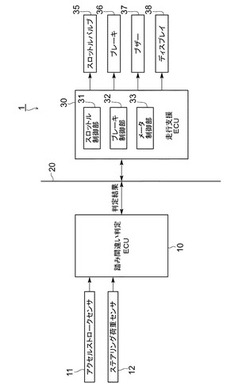
【課題】 踏み間違い判断の精度を向上でき、かつ、踏み間違いが生じたときに、運転者に応じたより適切な対応をとることが可能な走行制御装置を提供する。
【解決手段】 走行制御装置1は、アクセルペダルのストロークを検出するアクセルストロークセンサ11と、アクセルストロークが全開位置WOTよりも大きい領域では、アクセルストロークの増大に伴ってスロットル開度を減少する踏み間違い判定ECU10および走行支援ECU30とを備える。踏み間違い判定ECU10および走行支援ECU30は、アクセルペダルが第1領域で戻された場合には、アクセルストロークの減少に伴ってスロットルバルブ35を開弁側に駆動し、アクセルペダルが第2領域で戻された場合には、アクセルストロークの減少に伴ってスロットル開度を保持する。また、アクセルペダルが第2領域で戻されること無く、ストッパ位置Fまで達したときには、スロットルバルブ35を全閉する。
(もっと読む)
パワートレインのエンジン始動装置

【課題】簡単でクラッチの信頼性を確保でき、安定したエンジン停止制御を実現し、しかもN状態のときに再始動要求があっても、速やかにD状態に切替えることができるパワートレインのエンジン始動装置を提供する。
【解決手段】第1回転要素を含む遊星ギヤ機構と、入出力軸と、クラッチ手段とを備え、クラッチ手段は、締結時にはD状態となり、解放時にはN状態となるように構成され、停止再始動制御手段は、燃料供給停止時点(t3)からN状態とし、エンジンが完全に停止する前にクラッチ手段の締結が完了するように燃料供給停止時点以降の所定時期(t4)にクラッチ手段の締結指令を発するとともに、エンジンが停止直前の逆転動作を行っている間(t8〜t9)はクラッチ手段が完全締結しないように半締結状態を維持し(151a)、エンジンが逆転から正転に転じてから(t9)完全締結させる。
(もっと読む)
車両制御装置
【課題】各種の制御システムを兼ね備えて総合的な運動制御を行うとき、制御システム同士において干渉が生じることがないようにした車両制御装置を提供する。
【解決手段】車両の運動を制御する複数の制御システムを備え、そのそれぞれが、車両の走行速度などの車両の運動状態を検出する車輪速センサ70などの複数個のセンサと、車両のブレーキの作動などを行うアクチュエータと、センサ出力を制御量として入力してアクチュエータの操作量を決定してアクチュエータを駆動して車両の運動を制御する制御装置(ECU30)からなる車両制御装置において、検出されたヨーレートと、予め設定された規範ヨーレートとのヨーレート偏差を算出するヨーレート偏差算出部102と、センサ出力と算出されたヨーレート偏差を変数として入力し、アクチュエータのそれぞれの操作量を出力する少なくとも1つのニューラルネットワーク90を備える如く構成した。
(もっと読む)
車両制御装置
【課題】各種の制御システムを兼ね備えて総合的な運動制御を行うとき、制御システム同士において干渉が生じることがないようにした車両制御装置を提供する。
【解決手段】車両の運動を制御する複数の制御システムを備え、そのそれぞれが、車両の走行速度などの車両の運動状態を検出する車輪速センサ70などの複数個のセンサと、車両のブレーキの作動などを行うアクチュエータと、センサの出力を制御量として入力してアクチュエータの操作量を決定し、決定した操作量に基づいてアクチュエータを駆動して車両の運動を制御する制御装置(ECU30)からなる車両制御装置において、複数個のセンサの出力を変数として入力し、制御システムのアクチュエータのそれぞれの操作量を出力する少なくとも1つのニューラルネットワーク90を備える如く構成した。
(もっと読む)
1 - 4 / 4
[ Back to top ]