
Fターム[3D232CC42]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 安全性、信頼性 (2,661) | ハンチング防止 (33)
Fターム[3D232CC42]に分類される特許
1 - 20 / 33
車両用操舵装置
【課題】転舵輪の最大舵角近傍に達したステアリング操作を抑制することが可能な車両用操舵装置を提供すること。
【解決手段】マイコン41は、転舵角が転舵輪の最大舵角近傍の所定の舵角を超えた場合には、車速が速いほど、又は転舵角が大きいほど、伝達比可変装置8のモータ13を制御するための位置比例ゲインを高くするとともに、転舵角が転舵輪の最大舵角近傍の所定の舵角を超えた場合には、転舵角が大きいほど、伝達比可変装置8のモータ13を制御するための微分ゲインを高くする。
(もっと読む)
電動パワーステアリング装置

【課題】ソフトウェア制御によらず、簡素な構成にて、操舵状態に応じた適切なアシスト力付与を可能とする電動パワーステアリング装置を提供すること。
【解決手段】ECU11は、複数のスイッチング素子を接続してなる駆動回路18と、同駆動回路18に駆動信号を出力するドライバIC25とを備えるとともに、ドライバIC25は、通電方向に対応する第1端子25a及び第2端子25b、並びにその出力する駆動電力の供給量に対応した第3端子25cを備える。また、ECU11には、ステアリング操作に伴いオン/オフされる複数のスイッチに基づいて、そのステアリング操作の状態を示す操舵信号S_stを出力する操舵信号発生器15が接続される。そして、ECU11は、その操舵信号S_stに基づいて、ドライバIC25の第1端子25a及び第2端子25bに対し、その通電方向に対応した右操舵信号Vr及び左操舵信号Vlを出力する制御出力回路24を備える。
(もっと読む)
電動パワーステアリング装置の電流制御装置
【課題】高周波の外乱電圧により発生する振動を抑制するとともに、電流制御の目的である目標電流からモータに流れる電流の追従特性への影響を、電動パワーステアリングシステム全体の位相余裕及びゲイン余裕を十分確保し、安定性を失わないレベルまで小さくできる電動パワーステアリング装置の電流制御装置を得る。
【解決手段】外乱電圧により発生する振動を抑制する電動パワーステアリング装置の電流制御装置であって、目標電流値に対して電流検出値を追従させるフィードバックループ中に、外乱電圧からモータに流れる電流を定めるまでのループの伝達特性が、外乱電圧の周波数とノッチ周波数が一致するノッチフィルタ特性となる共振型位相補償器2を挿入する。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなくラトル音の発生を抑制することができる電動パワーステアリング装置を提供する。
【解決手段】不感帯域マップが基本アシスト特性から右アシスト方向にオフセットしたアシスト特性、及び、左アシスト方向にオフセットしたアシスト特性を併有するECUにより、モータに微小な回転トルクを生じさせ、駆動ギヤ及び従動ギヤ間でバックラッシュがない状態とする。この状態では、路面から逆入力があっても、両ギヤは互いに当接した状態を維持することができるので、ラトル音の発生を抑制することができる。また、ECUは、左右いずれか一方の操舵トルクの絶対値が増大して所定値(T0,T3の絶対値)より大きくなった後、当該所定値より小さい状態に戻るときは、アシスト方向が反転する方のアシスト特性を選択することにより、違和感の無い滑らかな操舵感を実現する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵状態の遷移過程における優れた操舵フィーリングを実現することのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクシフト制御量演算部31は、基礎補償成分としての基礎シフト量εts_bに対し、遷移係数Kssを乗ずることにより操舵トルクシフト制御量εtsを演算する。そして、この操舵トルクシフト制御量εtsには、急変防止処理部32において、ローパスフィルタ処理が施される。また、操舵トルクシフト制御量演算部31内にも、急変防止処理部40が設けられ、遷移係数Kssには、当該急変防止処理部40によるローパスフィルタ処理が施される。そして、この急変防止処理部40を構成するローパスフィルタのカットオフ周波数は、上記操舵トルクシフト制御量εtsに対応した急変防止処理部32を構成するローパスフィルタのカットオフ周波数よりも低く設定される。
(もっと読む)
電動パワーステアリング装置およびその制御方法
【課題】制御系における発振を抑制し、安定性と応答性を向上させることができる技術を提供する。
【解決手段】ステアリングホイールに連結される第1の回転軸と、転舵輪を転舵させるラック軸と、ラック軸を直線移動させる第2の回転軸と、トーションバーと、ステアリングホイールの操作に対するアシスト力を付与する電動モータと、ステアリングホイールの操舵トルクを検出する操舵トルク検出手段と、操舵トルク検出手段が検出した操舵トルクに基づいて電動モータに供給する目標電流を設定する目標電流算出部20とを備え、目標電流算出部20は、トーションバーをバネ要素として、電動モータ、第2の回転軸およびラック軸を慣性要素として含む制御系の共振周波数成分を抑制する共振補償部27を操舵トルク検出手段の出力側に有し、共振補償部27にて共振周波数成分が抑制された操舵トルクに応じて目標電流を設定する。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】車線追従性とドライバ協調性とを考慮して、運転者に違和感のない車線維持制御を行うことができる車線維持支援装置を提供する。
【解決手段】運転者の操舵意思を検出していないとき、車線追従性を重視した第1の操舵角制御を行い、運転者の操舵意思を検出したとき、運転者の操舵操作が反映され易い第2の操舵角制御を行う。操舵トルクThが操舵トルク閾値T0以下で、且つ操舵角偏差Δθ(=θr−θs)が操舵角閾値Δθ0以下であるとき、運転者の操舵意思がないと判断して、第2の操舵角制御から第1の操舵角制御へ移行する。
(もっと読む)
車両用操舵制御装置
【課題】 異常誤判断の確率を低減した車両用操舵制御装置を提供する。
【解決手段】 転舵用アクチュエータおよび転舵用アクチュエータ制御手段は、少なくとも複数系統設けられ、異常診断手段は、複数系統ごとに、暫定的な異常診断である暫定診断と、暫定診断後の本診断とによって異常診断を行い、暫定診断により暫定的な異常と診断された場合、本診断によって転舵用アクチュエータまたは転舵モータ制御手段の異常を診断する。
(もっと読む)
電動パワーステアリング装置
【課題】レゾルバ等のモータ回転角検出系が故障した場合であっても、操舵補助制御を継続可能とするとともに、操舵トルク方向に対して電動モータの回転方向が逆転するときにおいても、ハンドル振動を起こす可能性を防止または抑制し得る電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、電動モータの各線間逆起電圧の符号関係の情報に基づいて、電動モータの位置検出に必要な相対角量とその回転すべき相対角積算方向とを代替となる相対角度情報として決定する。
(もっと読む)
車両の操舵装置
【課題】 車両の横方向運動に係る横加速度をフィードバックして車輪の転舵角を制御する車両の操舵装置において、制御系閉ループの発散による車体ロールを低減する。
【解決手段】 目標横加速度演算部101は、操舵角θhと車速Vとに基づいて目標横加速度G*を設定する。フィルタ処理部102は、目標横加速度G*に対して、ロール共振周波数帯域のゲインを小さくしたフィルタ処理を行って最終目標横加速度G*’を設定する。実横加速度演算部114は、横加速度センサ34により検出した横加速度Gから車体ロールによる横加速度成分Grを減算して実横加速度Gxを求める。横加速度偏差演算部104は、最終目標横加速度G*’と実横加速度Gxとの偏差ΔGを計算し、PI制御部105が偏差ΔGに応じたフィードバック制御量を演算する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】チューニングし易く、しかも車両後退時においても車両挙動が安定する電動パワーステアリング装置の制御装置を提供する。
【解決手段】車両の操舵トルクに基づいて操舵補助指令値を算出する操舵補助指令値算出部と、モータの角速度を入力として収れん性信号を出力する収れん性制御部と、操舵補助指令値から収れん性信号が減算され、その減算結果である操舵補助指令値に基づいてモータの相数に合った電流指令値を演算する電流指令値演算部と、電流指令値演算部で演算された電流指令値に基づいて、電圧指令値を算出する電流制御部と、電流制御部で算出された電圧指令値に基づいてモータを駆動するモータ駆動部とを具備し、モータによるアシスト力を操舵系に付与するようになっている電動パワーステアリング装置の制御装置において、収れん性信号のゲインを車両の前進時と後退時とで変える機能を具備する。
(もっと読む)
電動パワーステアリング装置
【課題】保舵状態から手放し状態への移行時における操舵速度フィードバック制御のオーバーシュートを抑えて、その追従性の向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】ステアリング戻し制御部28は、操舵速度目標値ωs*に実際の操舵速度ωsを追従させるべく操舵速度フィードバック制御を実行することにより、ステアリングを中立位置に復帰させるための補償成分としてステアリング戻し制御量Isb*を演算する。また、ステアリング戻し制御部28は、そのステアリング操作の状態を判定する機能を有する。そして、当該ステアリング操作の状態が上記保舵状態から手放し状態への移行時であると判定される場合には、その出力するステアリング戻し制御量Isb*を低減する。
(もっと読む)
電動パワーステアリング装置
【課題】フェールセーフにより回転角の推定を行う際に、推定誤差に伴う操舵フィーリングの悪化を抑制する。
【解決手段】推定した相対回転角θeeに推定誤差があるか否かを判定し、推定誤差があると判定されたときに、その相対回転角θeeを補正する。具体的には、各相の電流検出値Ia〜Icが、定格電流よりも大きな所定値αを超えているか否かを判定し(ステップS34〜S36)、所定値αを超えるような過大な電流が流れているときには、推定誤差が発生していると考えられるので、相対角速度ωeeに補正量Δωを加算することでオフセットし補正を行う(ステップS37、S38)。このように、前回の回転角θer(n)に加算される相対角速度ωeeを補正することで、推定される相対回転角θeeの推定誤差を小さくする、又は解消する。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】運転者の意図する走行ラインとのずれからくる違和感を低減しつつ、走行車線逸脱を有効に防止することが可能な車線維持支援装置を提供する。
【解決手段】走行車線に対する自車両Cの進行方向の角度偏差に基づき当該偏差が小さくなるようにフィードバック制御する。その際に、左右の走行車線端部Leのうち、自車両Cの進行方向側に位置する横端部基準位置に対する自車両の距離によって制御ゲインを補正し、上記横端部基準位置に対する自車両の距離が短いほど上記制御ゲインが大きくなるように補正する。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】運転者の意図する走行ラインとのずれからくる違和感を低減しつつ、走行車線逸脱を有効に防止することが可能な車線維持支援装置を提供する。
【解決手段】自車両が走行する走行車線の幅方向中央からそれぞれ幅方向左右に個別にオフセットした位置である左右の横変位基準位置LXL、LXRを設ける。そして、自車両が、走行車線中央に対し左右の横変位基準位置LXL、LXRよりも外にいくと、自車両Cに近い横変位基準位置LXL、LXRからの自車両の横変位偏差が小さくなるようにフィードバック制御する。
(もっと読む)
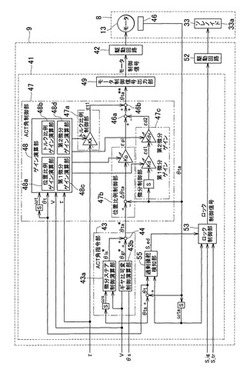
電動パワーステアリング装置
【課題】補助電源を使用する電動パワーステアリング装置において、補助電源を使用するか否かの制御のハンチングを防止する。
【解決手段】バッテリ9を含む主電源のみによってモータ4へ電力を供給する第1の出力状態と、主電源及び補助電源14からモータ4へ電力を供給する第2の出力状態とを選択的に構成する充放電回路16、及び、操舵補助に必要な電力に応じて充放電回路16の出力状態を選択する制御回路6を備えた電動パワーステアリング装置において、制御回路6は、第1の出力状態において操舵補助に必要な電力が上り閾値P1以上になったときは第2の出力状態を選択し、第2の出力状態において操舵補助に必要な電力が上り閾値P1より低い値の下り閾値P2以下になったときは第1の出力状態を選択することにより、出力状態の変化にヒステリシスを設ける。
(もっと読む)
パワーステアリング装置
【課題】 手放し状態におけるハンチングを回避して違和感を低減したパワーステアリング装置を提供する。
【解決手段】 パワーシリンダの両圧力室と可逆式ポンプの一対の吐出口とをそれぞれ接続するとともに、少なくとも一部分がエラストマー材で形成された第1油路および第2油路と、可逆式ポンプを駆動する電動機と、転舵輪に与える操舵アシスト力に応じて、電動機に駆動信号を出力する電動機制御手段と、電動機制御手段からの駆動信号によって電動機を回転させようとする方向と、可逆式ポンプの実際の回転方向とが不一致のとき、ポンプ逆回転状態と判定するポンプ逆回転判定手段と、ポンプ逆回転判定手段がポンプ逆回転状態と判定するとき、可逆式ポンプに発生するトルクを減衰させるダンピングトルク付与手段とを有することとした。
(もっと読む)
パワーステアリング装置
【課題】 手放し状態におけるハンチングを回避して違和感を低減したパワーステアリング装置を提供する。
【解決手段】 ステアリングホイールに連結された操舵機構と、操舵機構と転舵輪とを接続する伝達機構と、操舵機構へ入力されるトルクに基づき伝達機構を駆動することにより、転舵輪に対しアシスト力を付与する電動機と、転舵輪に与える操舵アシスト力に応じて、電動機に駆動信号を出力する電動機制御手段と、電動機制御手段からの駆動信号によって電動機を回転させようとする方向と、電動機の実際の回転方向とが不一致のとき、電動機逆回転状態と判定する電動機逆回転判定手段と、電動機逆回転判定手段が電動機逆回転状態と判定するとき、電動機に発生するトルクを減衰させるダンピングトルク付与手段とを有することとした。
(もっと読む)
車両のステアリング制御装置
【課題】 未熟練なオペレータといえども高速走行時にステアリング切り直しを行わせないようにして、タイヤの寿命向上を図る。車両の仕様を変更することなく、熟練度に応じた最適な操作性が得られるようにする。未熟練なオペレータが迅速に操作技能レベルを高めていくことができる、車両の運転教育を兼ねたステアリング制御装置を市場に提供する。
【解決手段】 判定手段20では、高速走行時にステアリング切り直し操作が行われたか否かが判定される。習熟度判別手段40では、判定手段20の判定結果に基づいて、ステアリング感度の大きさを低くするか、あるいはステアリング感度を高くするかが判別される。ステアリング感度変更手段30では、習熟度判別手段40の判別結果に応じて、ステアリング感度が変更される。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて、実電流値の検出誤差に起因する異音や振動の発生を抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン17(モータ制御信号生成部24)は、電流フィードバック制御を実行する各F/B制御部27d,27qに加え、オープン制御(オープンループ制御)を実行するオープン制御部31、及びこれら各制御部によるフィードバック制御及びオープン制御間の切替判定を実行する切替判定部32を備える。そして、ステアリング操作状態、即ちアシスト力を発生させるためのモータ制御が、実電流値の検出誤差に起因するトルクリップルが発生しやすい制御領域にある場合には、そのモータ制御信号を生成するための制御を電流フィードバック制御からオープン制御に切り替える。
(もっと読む)
1 - 20 / 33
[ Back to top ]