
Fターム[3D232DA09]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角速度 (667) | ハンドル操舵角速度 (608)
Fターム[3D232DA09]に分類される特許
601 - 608 / 608
車両用操舵装置

【課題】 バックアップ手段を備えたステア・バイ・ワイヤシステム方式の車両用操舵装置において、最大転舵角付近での転舵モータの駆動負荷を抑制し、転舵モータの小型軽量化を図る。
【解決手段】 ステアリングホイール9と転舵モータ29,30とを機械的に連結するバックアップ装置2と、バックアップ装置2を解放状態にしてステアリングホイール9のステアリング操作に応じて転舵モータ29,30を駆動するSBW制御と、バックアップ装置2を連結状態にしてステアリングホイール9からのドライバの操舵力に補助操舵力を付加するように転舵モータ29,30を駆動するPS制御とを行う第1制御コントローラ4aとを備え、第1制御コントローラ4aは、前輪27,27の転舵角が所定の第1設定舵角Ydeg以上となったときには、SBW制御からPS制御に移行する。
(もっと読む)
産業車両のステアリング装置

【課題】 操舵輪の旋回の限界位置での衝撃を効果的に緩和することができ、しかも、操舵角を検出するセンサの調整にかかる手間を省くことのできるステアリング装置を提供する。
【解決手段】 操舵輪を旋回駆動する駆動装置を制御する制御装置が、操舵輪の最大操舵角L,Rを設定する最大操舵角設定手段と、最大操舵角L,Rから操舵角が絶対値として小さくなる方向へ所定の角度Bの範囲内に現在の操舵角Aがあるか否かを判定する操舵角判定手段と、操舵輪の操舵される方向が操舵角が絶対値として小さくなる方向か、大きくなる方向かを判定する操舵方向判定手段と、駆動装置を制御する駆動制御手段とを備える。そして、駆動制御手段は、現在の操舵角Aが上記角度範囲内にあると判定され、且つ、操舵される方向が操舵角が絶対値として大きくなる方向であると判定されたときに、操舵輪の旋回する速度が抑制されるよう駆動装置を制御する。
(もっと読む)
可変伝達比ユニット、これを利用したギア比可変パワーステアリング装置及び、ギア比可変パワーステアリング装置の制御方法
【課題】小型、低コストの可変伝達比ユニット、この可変伝達比ユニットを備えたギア比可変パワーステアリング装置及び、小型、低コストの可変伝達比ユニットを採用するために有効なギア比可変パワーステアリング装置の制御方法を提供すること。
【解決手段】ギア比可変パワーステアリング装置は、第1のステアリングシャフト321と第2のステアリングシャフト322との間の回転伝達比を可変にする可変伝達比ユニット7を備えたものである。可変伝達比ユニット7は、第1のステアリングシャフト321と一体回転する第1のサーキュラスプライン791a及び第2のステアリングシャフト322と一体回転する第2のサーキュラスプライン791bを含む減速機79を有している。第1のサーキュラスプライン791aと第2のサーキュラスプライン791bとの間には、その相対回転を許容又は規制可能なように構成されたロック機構8を介設してある。
(もっと読む)
電動パワーステアリング制御装置およびそれにおける駆動電流オフセットの調整方法
【課題】 より高い精度の駆動電流オフセット値を入力し、この高い精度の駆動電流オフセット値を用いて駆動電流のオフセット補正を行なうことのできる電動パワーステアリング制御装置、およびその駆動電流オフセットの調整方法を提案する。
【解決手段】 制御装置CNT内に組み込まれた電動機駆動電流検出手段とは別に、それよりも高い精度の電動機駆動電流測定手段を用意し、この電動機駆動電流測定手段により、高い精度の駆動電流オフセット値を出力する。制御装置内のオフセット補正手段またはオフセット信号発生手段には、駆動電流測定手段からの高い精度の駆動電流オフセット値を受ける入力手段を設ける。
(もっと読む)
自動車の操舵車輪の操舵支援方法及び操舵支援装置
本発明は、自動車(1)の操舵車輪(3、4)の操舵支援方法及び操舵支援装置に関する。本発明の自動車(1)の操舵車輪(3、4)の操舵支援方法及び操舵支援装置は、自動車(1)の運転者によるステアリングホイール(8)の操作に対する自動車(1)の応答時間を短縮するために、ステアリングホイール(8)とラック部品(14)との間に、位相進度が適用されることを特徴とする。
 (もっと読む)
(もっと読む)
車両を安定化させる際に車両操作者を支援するための方法及び装置
この発明は、車両を安定化させる際に、車両の操舵系統に追加操舵トルクを加えて、車両操作者を支援する方法に関する。この方法は、車両の操舵可能な車輪における瞬間的な操舵角と目標操舵角の間の操舵角偏差に応じて、追加操舵トルクの第一の成分を求め、その場合に、車両のヨーレイトの瞬間的な値と基準ヨーレイトの値の間の偏差に応じて、この操舵角偏差を求めるとともに、車両モデルにおける運転者が設定する少なくとも一つの変量の値に応じて、この基準ヨーレイトの値を計算することを特徴とする。更に、この発明は、この方法を実施するのに適した装置に関する。  (もっと読む)
(もっと読む)
車両を安定化させる際に車両操作者を支援するための方法及び装置
この発明は、目標操舵角と瞬間的な操舵角の間の偏差に応じて決まる追加操舵トルクを車両の操舵系統に加える形で、車両の操舵可能な車輪の目標操舵角を調節して、車両を安定化させる際に車両操作者を支援する方法に関する。この方法は、車両の操舵系統に作用する負荷モーメントの値を見積もることと、この負荷モーメントに関する見積値に応じて、追加操舵トルクを算出することとを特徴とする。更に、この発明は、この方法を実施するのに適した装置に関する。  (もっと読む)
(もっと読む)
自動車内における運転者の負荷を調整するための方法及び装置
本発明は、自動車を運転中の運転者の負荷を調整するための方法であって、負荷の値がセンサによって記録された運転者の生理的データから決定される方法、及び前記方法を実行するための装置に関する。本発明によれば、運転者の負荷、すなわち、運転負荷は、最適な運転負荷範囲に維持され、又は前記最適な範囲から外れたときには、そこに戻され、これによって、運転者の最適な動作能レベル又は注意レベルを保証する。すなわち、車両システムは、決定された運転負荷値に依存して制御され、これによって、運転者は、視覚的、聴覚的、又は触知的センサによって、前記運転者の運転負荷値が最適な運転負荷範囲内の値に維持される。 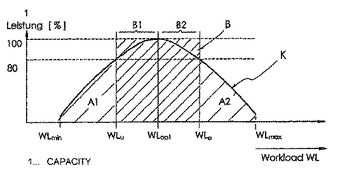 (もっと読む)
(もっと読む)
601 - 608 / 608
[ Back to top ]